ppoirier
May 3, 2018, 2:22am
24
Yes Loiter is the preferred mode for OpticalFlow.
[image]
The Benewake TFMINI is a small Laser RangeFinder that has a lot of potential as a replacement for the Sonar. Its in the same price range as the Maxbotix and it has a range up to 12 Meter indoor and 6 Meter outdoor.
It comes preconfigured in binary output at 115200 Bauds and we can change the mode by issuing these commands through the Benewake console (http://benewake.com/en/down.html ) or using Realterm:
The command of standard output is 42 57 02 00 00 00 01 06
The command of pix …
I think the nominal noise is more a PX4 type of sensor signal ?
I also updated the discussion about 3.6 and Loiter mode with Optical Flow, just amazing !!
OMG @Leonardthall The new Loiter with OpticalFlow is soooooo much FUN !!!
Its fast and agile on the sticks, and rock solid when I let it fly no inputs.
Please note that these test are made indoor with no GPS attached, just PX4FLOW and a TFMINI Lidar.
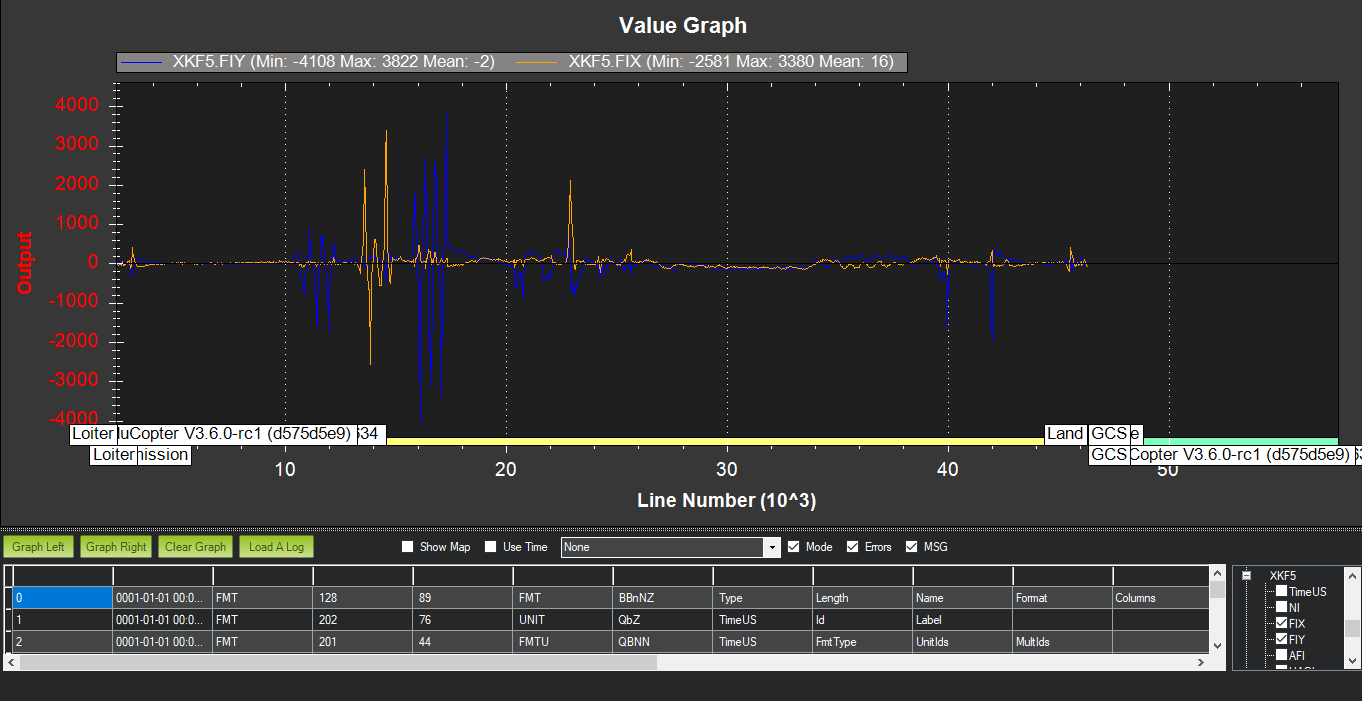
Here is the Y axis of OpticalFlow and PX4Flow IMU and Pixracer IMU
The amplitude is equivalent to the manual alignment tilt&roll test like in the OpticalFlow wiki, but this time it is inflight !!
[image]