Hello,
I am using Pixhawk 2 as flight controller, Lidar Lite v3 for distance measurement.
I want to use PX4Flow for getting the velocity of the quadcopter.
I am taking the Lidar data through pwm and connecting PX4Flow on the i2c pin. The Lidar is working properly. On following the instructions given on the website, I am unable to get data on Mission Planner.
Please help. I am struck on the problems since quite a lot of time.
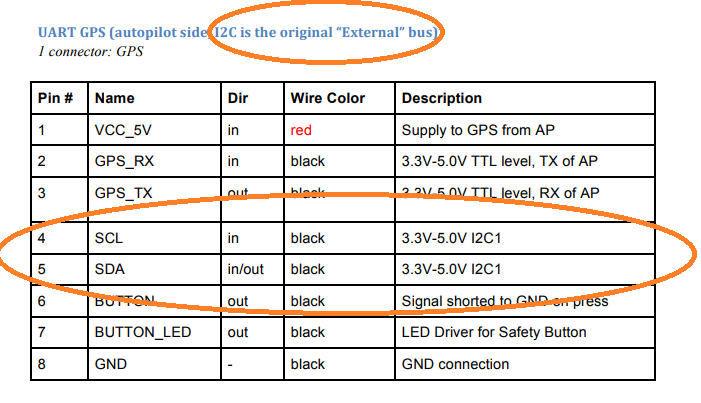
So, you are suggesting to solder to be able to connect to the GPS I2C, right? … Is there other alternative? Shouldn’t it work with the I2C port on Pixhawk?
I just found the required connector, I think. In the given connector for GPS for PH2, there are only 3 wires for the I2C.
When connected, the PX4Flow isn’t powering.
hi you guys, 4 years later from you, I was having the same problem and you have help me to solve this problem.
The I2C from the GPS did the trick! Thanks!
Hello,
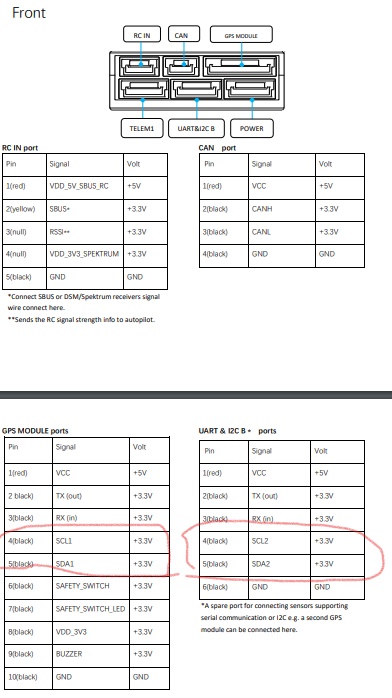
I had the same problem, and I switched to the GPS1 port and that solved it.
However, although the PX4Flow data is coming to the Flight Controller, the data from the MB1043 RangeFinder connected to the PX4Flow is not.
Any idea what it might be?
Hi, 4 months later from you haha.
Do you guys mean I can’t directly use the i2c2 pin on I2C port but I should use i2c1 pin on GPS port?
My FC is pixhawk4 mini.
I appreciate for your reply.
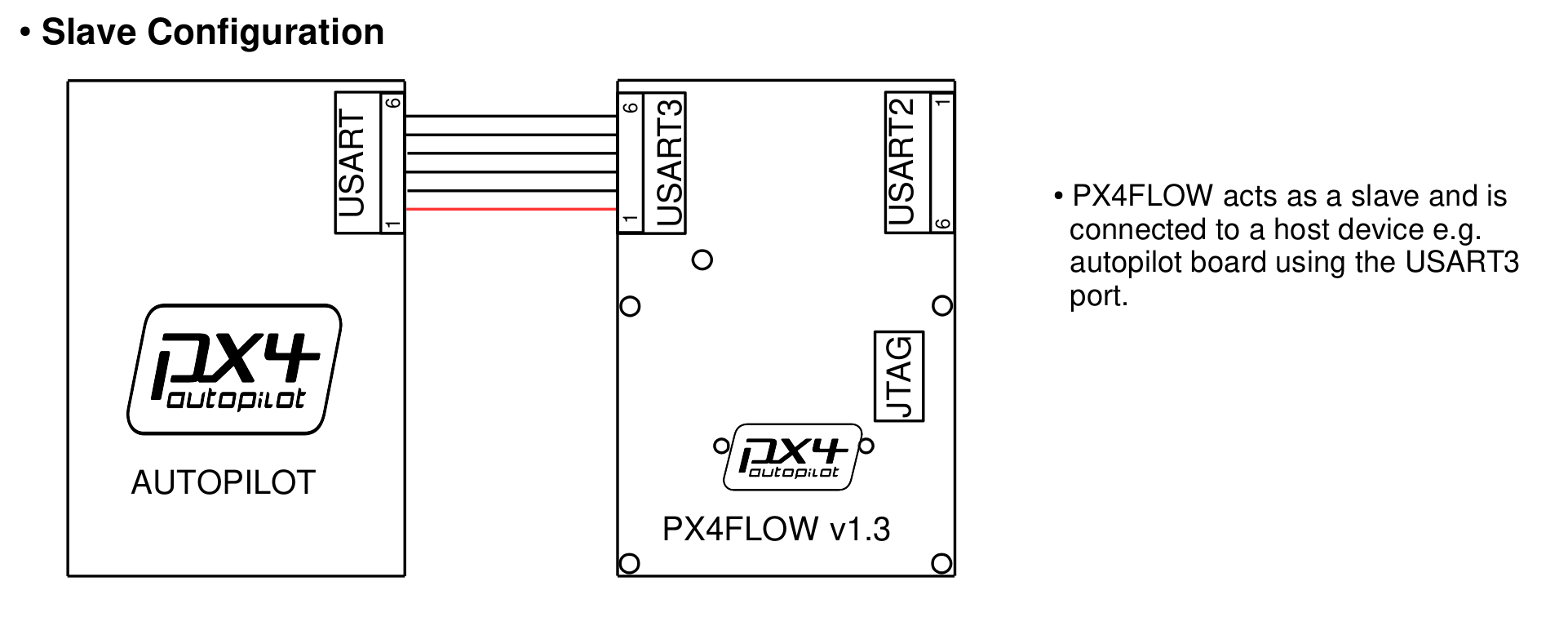
but when connected the USART3 of px4flow to the UART&I2C port of the pixhawk mini, I don’t get any response.
In docs in ardupilot, it is recommended to connect the 4-pin I2C port to the autopilot, but the px4flow’s documentation suggest to connect USART3 (6pins) of the px4flow to the autopilot. Is there a reason why?