The reason is the ArduPilot OpticalFlow driver is I2C and the EKF is processing signal from this driver specifically when setting FLOW_TYPE 1.
But I was curious if serial output was correct with our firmware version :
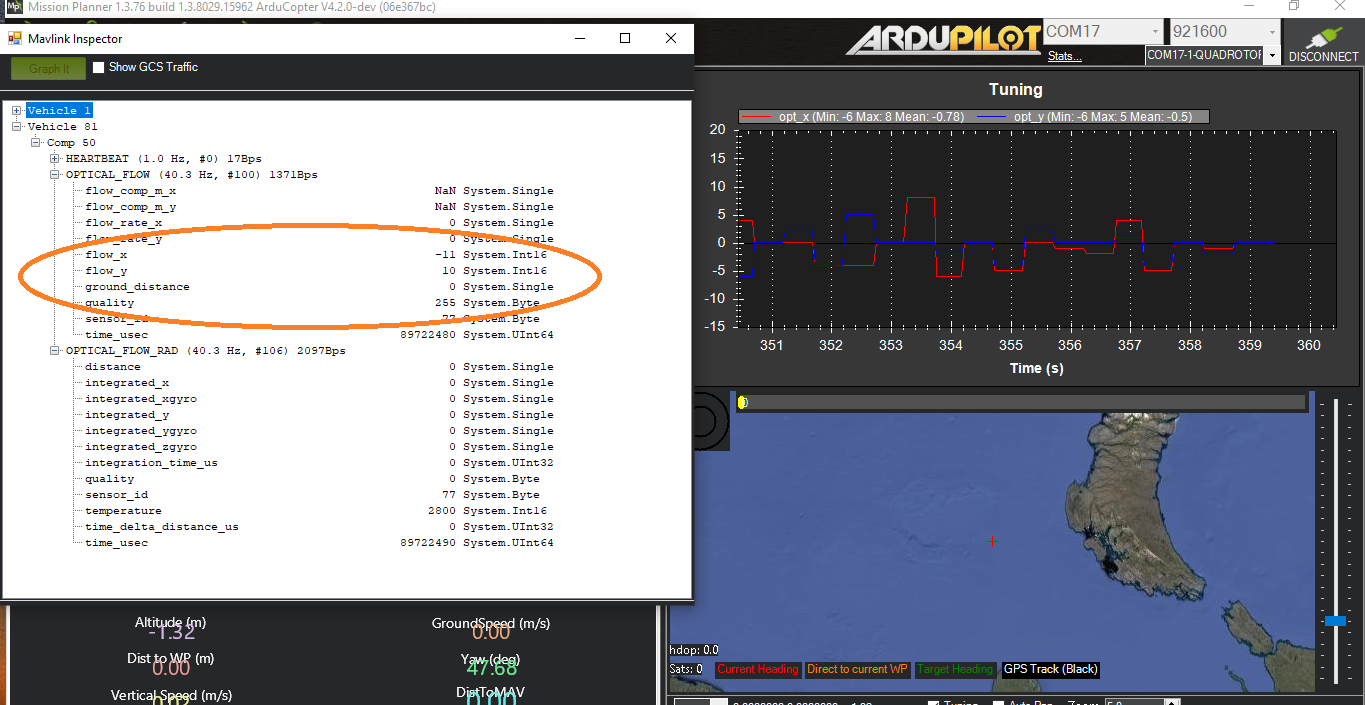
You can connect PX4FLOW with serial and using Mavlink signal as the Opticalflow source (type 5 in FLOW_TYPE). I have not tested if this is working as good as the I2C though.
This is the MavLink message, you can see that is is just outputting the flow_x and flow_y messages
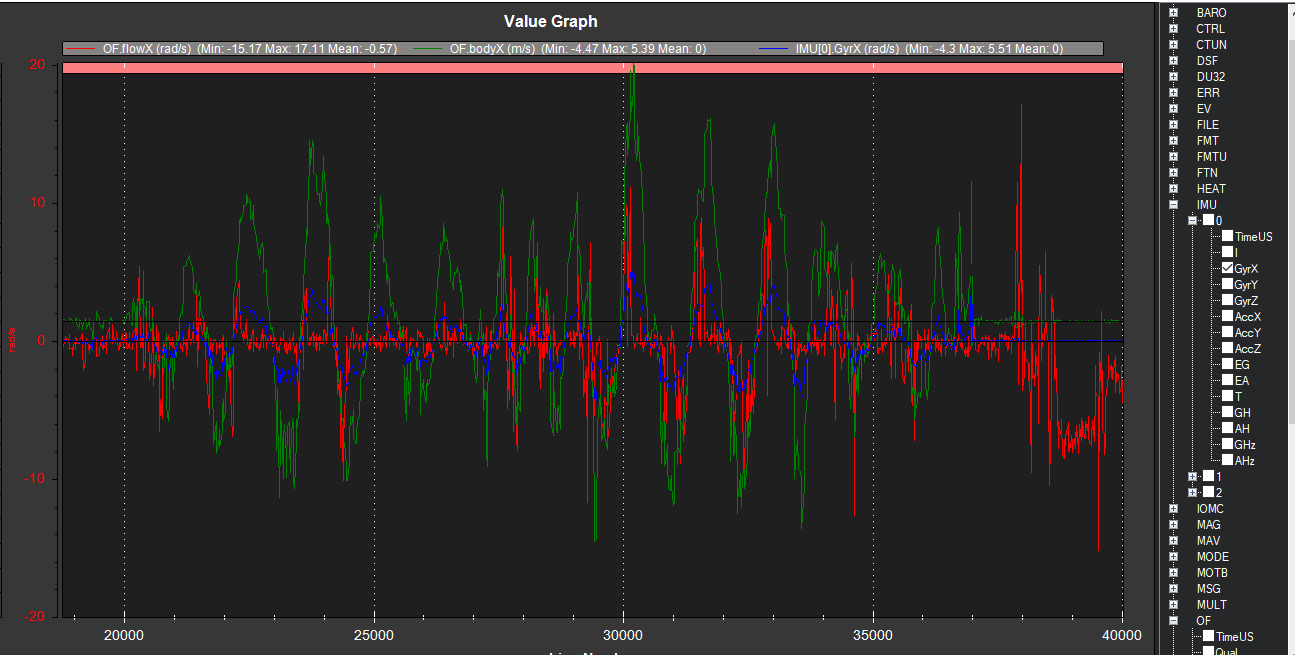
This is the LOG, looks like the PX4FLOW Gyro is disproportionally high