Hi there,
I am struggeling with the Bad Opt Flow Health. I can’t get rid of it. I reinstalled the FW on the PX4Flow several times but it is still the same. I am using a Pixhawk 2.1. with Arducopter 3.5.5. At the moment I can’t prevent the failure bye pluggin in the USB while it is booting up or something like this. I already changed TX and RX at the cable. Of Course I used the search function and I tried the those Solutions. But I still doesn´t work.
Does someone have any other suggestions to solve this issue?
Thanks so much for helping out!
Hi ppoirier,
I am using a Teraranger One as LIDAR. The Flow sensor is connected as shown in the wiki article via I2C. Even if I am connecting the sensor directly with the Pixhawk or with the I2C Hub I do get the Bad Opt Flow Health message. Maybe there is a Hardware issue caused by a magnetic field. If I do connect the Flow Sensor via USB I can see the Image and I do get the Information. So that should be fine. The wire I am using I already tested the resistant, that should be fine as well.
I don´t know why, now I am going to try the PX4 Flight Stack to figure out where the Problem could be.
EDIT: I just tried with QGC Station. In the Analyze Wizard I do get some values bye the flow sensor. So I think that could be a Software issue than!?
Hello,
well I am using this FW already. And I reinstall this FW serveral times but it still doesn´t work.
It seems that I havent the Problem with PX4 Flight Stack, but I couldn`t go for a flight yet. Now I am wondering if the PX4 Flow Sensor even does work with APM Flight Stack?
If so, I will give it another try by setting up the System bye Zero.
Ah okay,
so that means if I am using QGC for installing the FW for the Flow Sensor it will defently not run with Arducopter? Because I tried to reinstall the FW with Missionplanner for the Flow Sensor. But it doesn´t work because the FW was already installed. So I used QGC to reinstall the FW (but the File was the same as with MP). I will give it another try and set it up with MP and APM Stack.
Is there a way to force a reinstall of the FW with MP? It tells me always the FW is already installed, there is no Need to update.
Yes, exactly how I did it. I am still running the KLT FW. So it should work with ACopter. I did the reinstallation with APM and got still the Bad OptFlow Health
At the Moment yes, I just Installed Arducopter 3.5.5 with Missionplanner again to give it another try. I dont know which Ground Station and which flight stack I am gonna use finally . I would prefer to Work with Missionplanner because of better documentation and nice Support at the Forum :-).
I did the reinstallation of the FW for the Flow Sensor with QGC.
And before I tried PX4 with QGC to see if the Flow Sensor would work with this workchain. But finally I reinstalled APM with Mission Planner again.
Right now the System reconized the flow sensor. Will see if it does it again.
Make sure that you supply the Px4Flow with a good power source == All my builds use a dedicated UBEC and Capacitors for px4flow and RangeFinder.
Please note that I opended an issue with Mission Planner Firmware flashing . Its not working correctly, the method with cusrom firmware using QGC (as showned above) is working better.
Good morning from Germany,
Okay how could the supply Looks Like? At the Moment the Flow Sensor only gets Power via the pixhawk. I could supply the Flow Sensor with 5V via USB by a PDB. I will give IT a try.
The rangefinder already does have a separeted Power supply by the I2C Adapter (teraranger one).
Hi,
it seems that it is working, thanks o lot! To supply the PX4Flow in additional with Power should be a item in the wiki.
I cut off a USB cable and did some soldering on it to get the 5V to the USB Port of the Flow Sensor. Is there a different Option to supply the the Flow Sensor with Power? For example to solder some cable straight to circuit board of it?
Hello
I feed the power from the I2C directly
Cut the vcc line from the Flight Controler and inject power to the I2C hub from the UBEC (and common ground)
Cool = Hit the like button and set status as solution found so other can their optical flow working
Dont forget to follow through the config and calibration and Enjoy the Fly
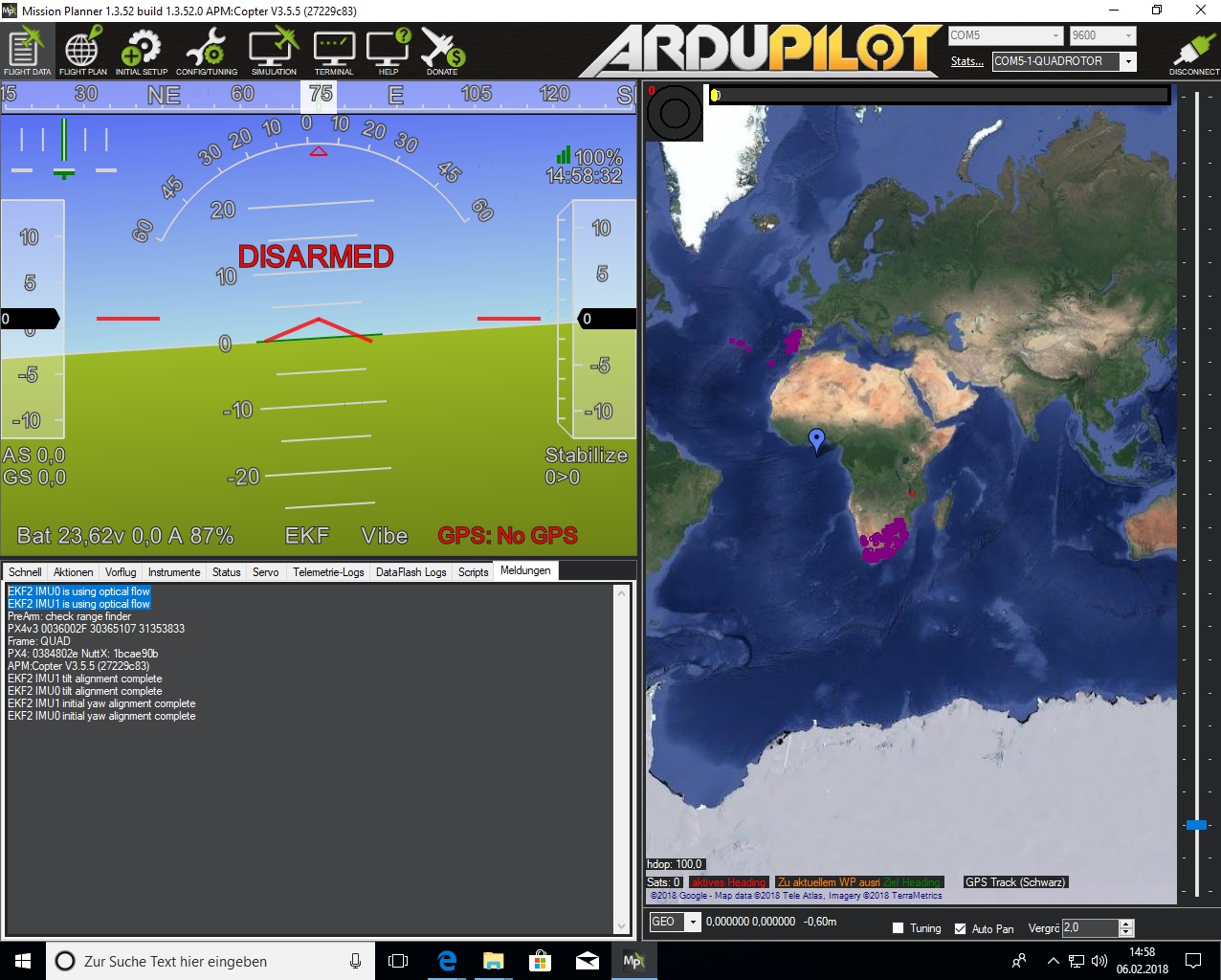
But now I do have some Trouble with the Range Finder^^. It a TeraRanger One, it just appeared since I did the Power Supply via I2C Hub with PDB. It says “Prearm: check Range finder”, and in the initial Setup the Range Finder don´t give some values. Just tried with the supply via Pixhawk, now I do have values again, but the prearm message is still there. There is no Change if the TeraRanger one get power at first.
Is LIDAR the same as Rangefinder? Because if the TeraRanger is not connected and he aspect the LIDAR he gives me the BAD LIDAR Health. But ir is gone if the TROne is connected. But I always do get Checke Ranger Finder.


 !
!