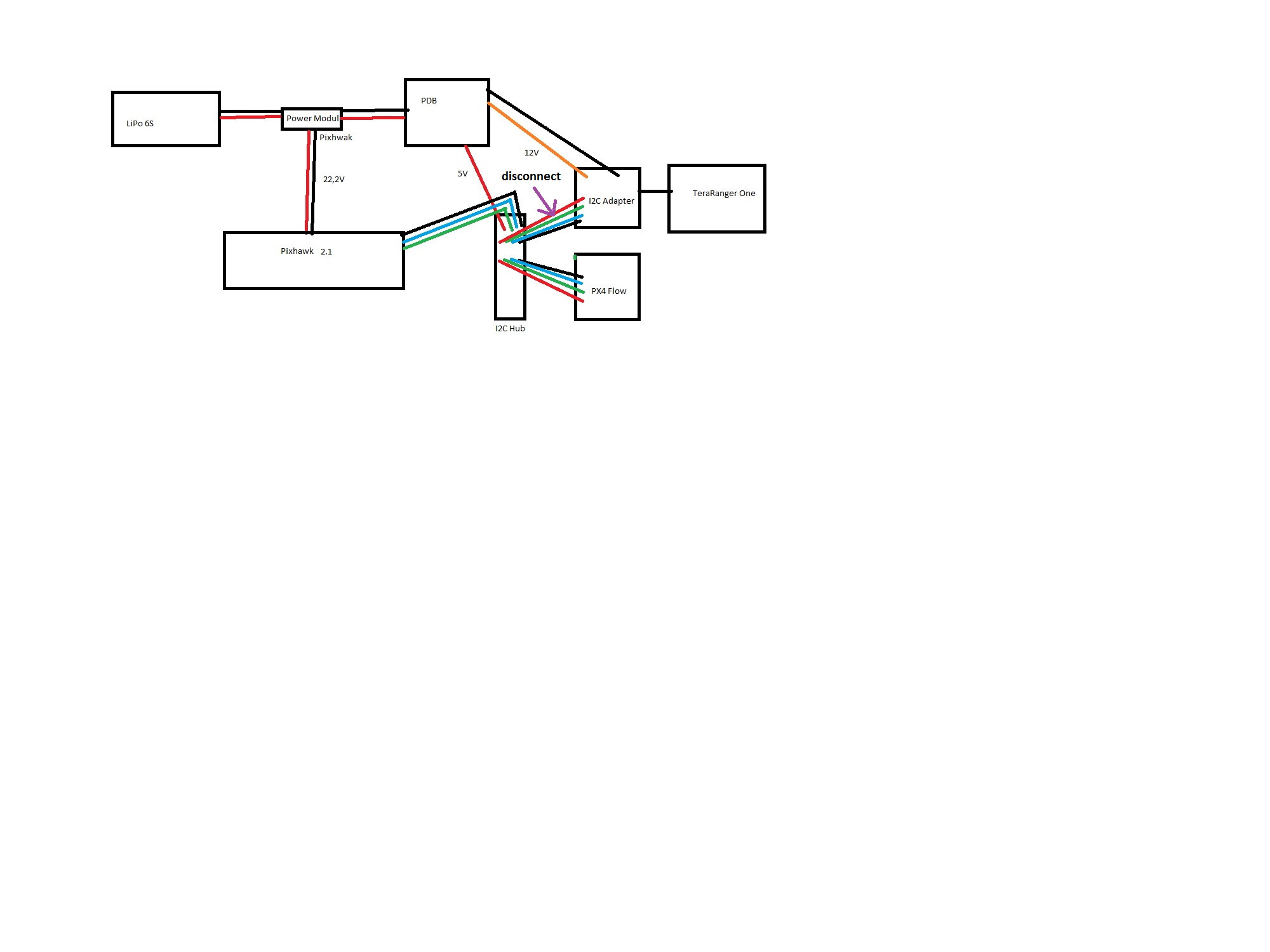
Here is a Little drawing how I connect it. I disabled the Parameters in Prearmchecks. I think the check Rangefinder is coming from the Sonar from the Flow Sensor, caused by to Little distance to the ground?!
At the Moment it is working, after connecting the LiPo I reconnect the Powersupply to the Pixhawk. After that the Flow Sensor is running.
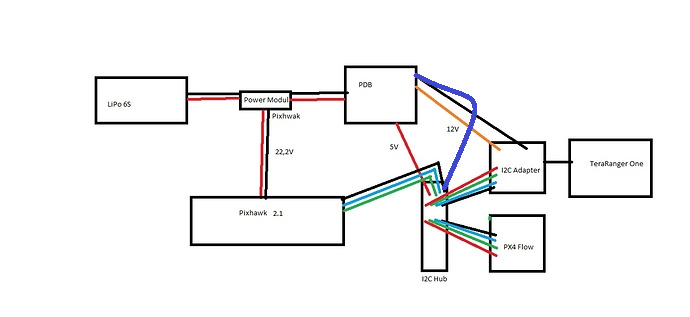
Make sure you have ground continuity (common ground as I wrote above) , so in the diagram below I added ground from PBD to HUB, assuming that both 5V and 12V grounds are connected together on the PBD
I measured between Ground of Pixhawk an Ground from PDB. There is a clear Connection so they should have the same Ground.
Yes 12 and 5V does have the same ground.
Yes, you have to use an Adapter with 10-2x V supply. They do have the same ground Connection.
But I think I got it now. I have to make sure that the Opt Flow and TR One do have at first power. Mostly it works, sometimes I do have a bad Lidar health message.
For General, if there appears a Bad… Message, and after a second or two it vanish at the flight data screen. Does it mean that everthing is fine then or is there still a Problem?
Thats a normal pattern becaus the Lidar has to read within the range you setted in the parameter.
So if its less than minimum value when quad is on ground or if its looking upward you might get this message, generally I disable the rangefinder in the prearm change.
Gunter , btw, look here you could make your TROne talk I2C for 2$ !!
That would need to change some code, but when I developped that I got my inspiration from TROne

 <img
<img