We have been impressed with videos showing the butter smooth landings of the Elanus Duo (Believer frame made by MakeFLyEasy, assembled and configured by DualRC) and decided to choose it as a mapping platform for work in large African cities. Initially we were going to train operators onsite but Covid19 put a rude end to that idea. Instead travel restrictions led to a different approach: Why not equip the platform with precise navigation systems so that precise landings can be safely executed on short runways automatically, thereby reducing or eliminating the need for piloting skills and long runways and hence for onsite training?
In our first tests the manufacturer recommended that final landing approaches should be 300m long from an altitude of 30m resulting in a very flat approach slope of less than 7 degrees. That approach requires runway lengths well in excess of the soccer field sized landing fields that would be available for operations in dense and informal urban environments. We thus had to come up with an approach that required much shorter runways.
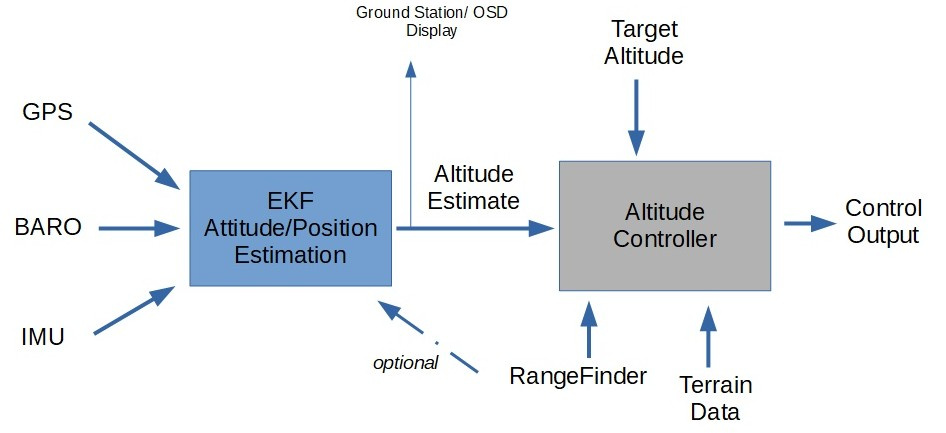
To achieve spatial precision in automated landings we specified a dual frequency GNSS RTK capable receiver for very precise navigation in RTK mode. Accordingly, DualRC installed the uBlox based dual frequency F9P receiver from Drotek. To provide redundancy in accurate height measurements during landing, we installed a TF Mini Plus Lidar sensor to act as rangefinder (altimeter). After some modifications we managed to rapidly get stable RTK fixed solutions near the launch/landing site. (We set up a V-Map receiver to provide reference data in real time via Mavlink.) The maximum range finder range is 12m. Prior to any further experimentation the platforms were weight balanced and tuned.
To experiment with approaches leading to shorter runways we started off by designing a short waypoint program with a landing sequence of which the last leg started off at 200m away from and 60m above (resulting slope of 17 degrees) an accurately (2cm) surveyed touch down point. Our horizontal LAND coordinates were obtained by placing the plane on the desired touch down point while in RTK fixed status. The GNSS RTK derived horizontal “home position” coordinates were entered in the coordinate fields of the LAND point in the waypoint program. This was obviously done prior to writing the waypoint file to the drone.
In all our test flights we followed the following procedure:
• Place drone flat on ground, centered over the desired touch down point.

• Ensure RTK status is fixed.
• Arm the motors.
• Launch in auto mode.
• Complete the entire flight in auto mode.
• Wait for drone to disarm.
• Repeat same procedure for next flight
We understand that the absolute height attached to the desired landing position is determined by the height of the drone at the time the drone is armed. For a robust investigation of landing repeatability it would thus have been necessary to arm the drone on the surveyed touch down position for each and every flight. Since the landing strip we used had a very flat profile, we did not always arm the drone at the touch down spot but rather at the position where the drone came to rest after landing. The maximum vertical difference between touch down position and take-off arming position is, in our estimate, less than 10cm and presumably insignificant from a practical point of view.

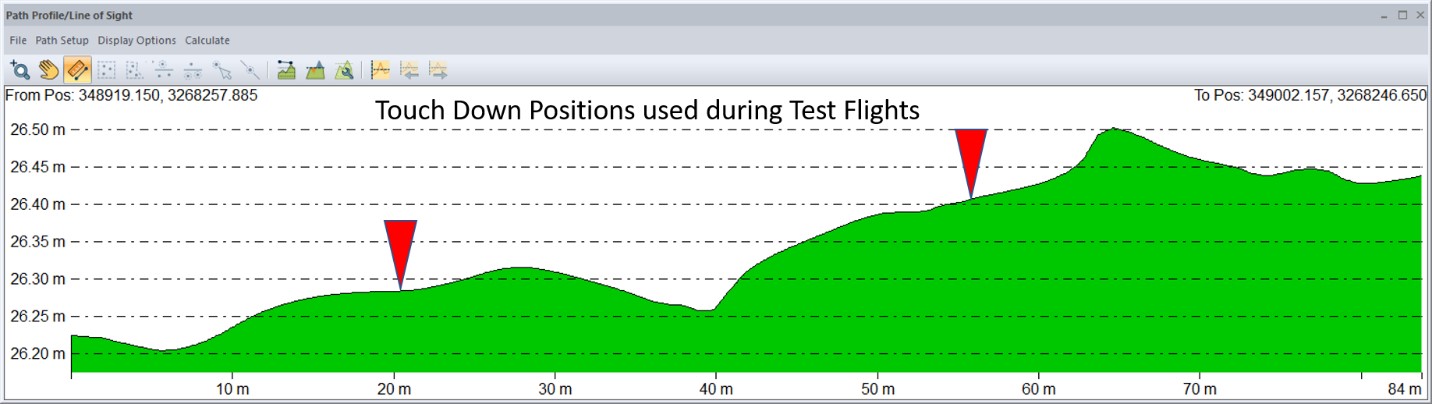
Figure 1:Center Line Profile of the runway used in our experiments.
Following the above procedure we performed 25 flights on 09-09-2020, all in exactly the same manner as described above. All the landings were overshot. The longest distance between desired land position and where the plane came to rest was 26.5m. The lateral distribution of the final trajectories – i.e. between touch down and end-of-skid is 4.5m. Hence, based on the landing trajectories of the 25 test flights one could state that under the given conditions and with the settings in place at the time of the flights, a landing patch of 10mx30m would be sufficient to land the plane safely in automatic mode.
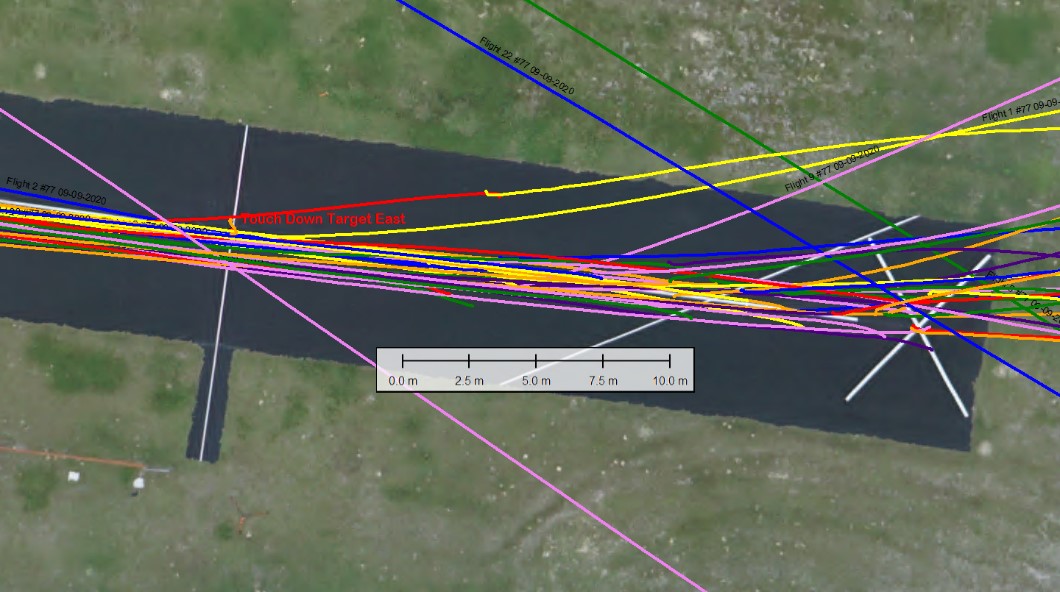
Figure 2: Plan view of 25 test landing trajectories
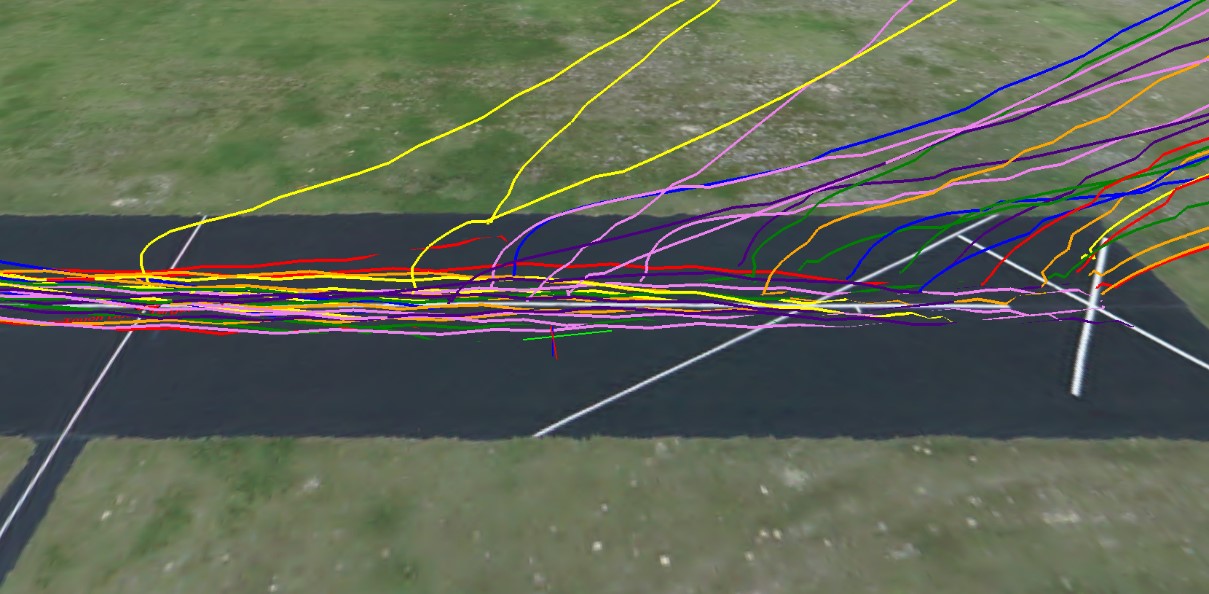
Figure 3: 3D view of 25 test landing trajectories
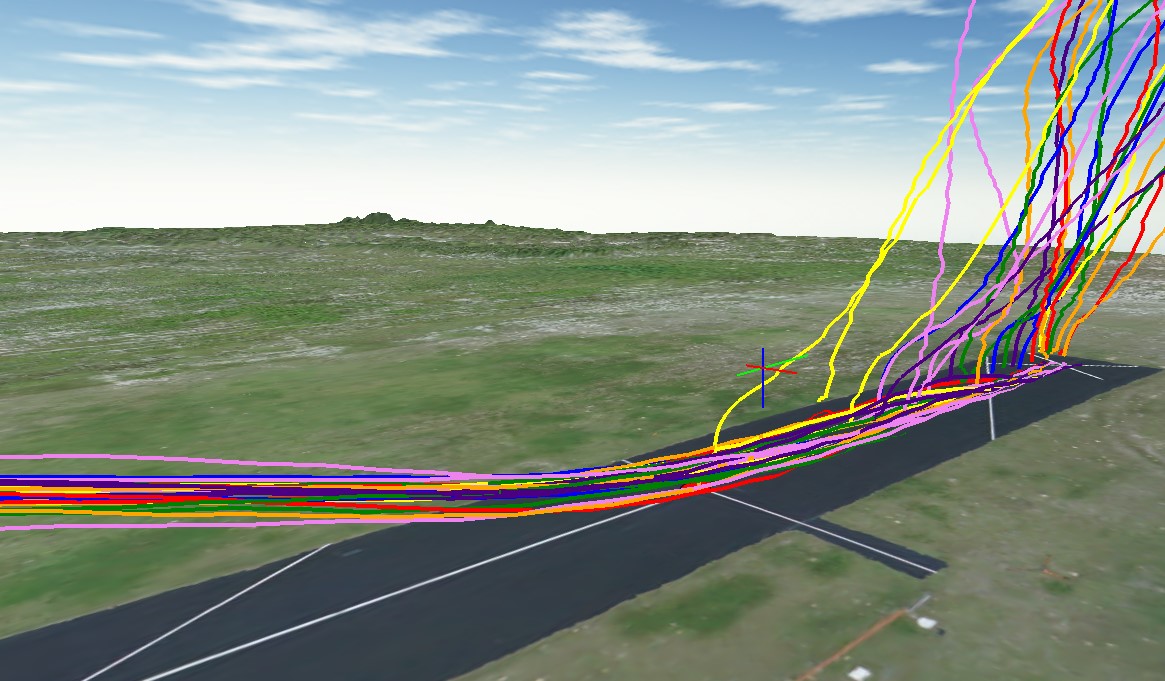
Figure 4: Another 3D view of 25 test landing trajectories
To test the entire mapping system we flew two automatic flights with the same plane on 09-11-2020, this time including aerial image acquisition in the waypoint file. These flights were conducted with the identical payload, weight balancing and parameter settings as during the test flights on 09-0-2020 and to our great disappointment the landings of both the flights fell well beyond the established 10mx30m landing footprint which we thought we had established with the 25 test flights.
For flight 1 the final rest position was 52m beyond the desired touch down point while that for flight 2 was 42m.
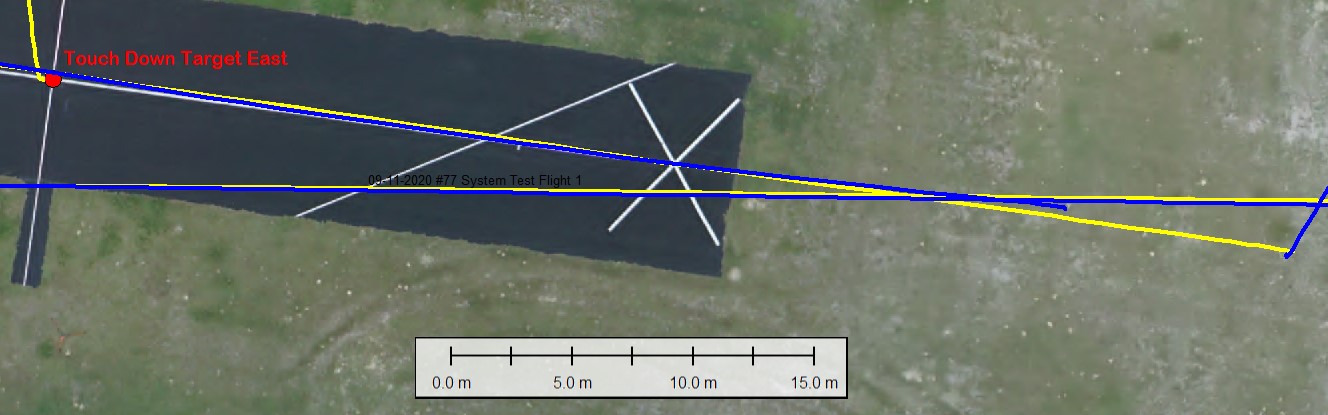
Figure 5: Plan view of system test landings (Flight 1 blue, Flight 2 yellow)

Figure 6: 3D view of two system test flights (Flight 1 blue, Flight 2 yellow)
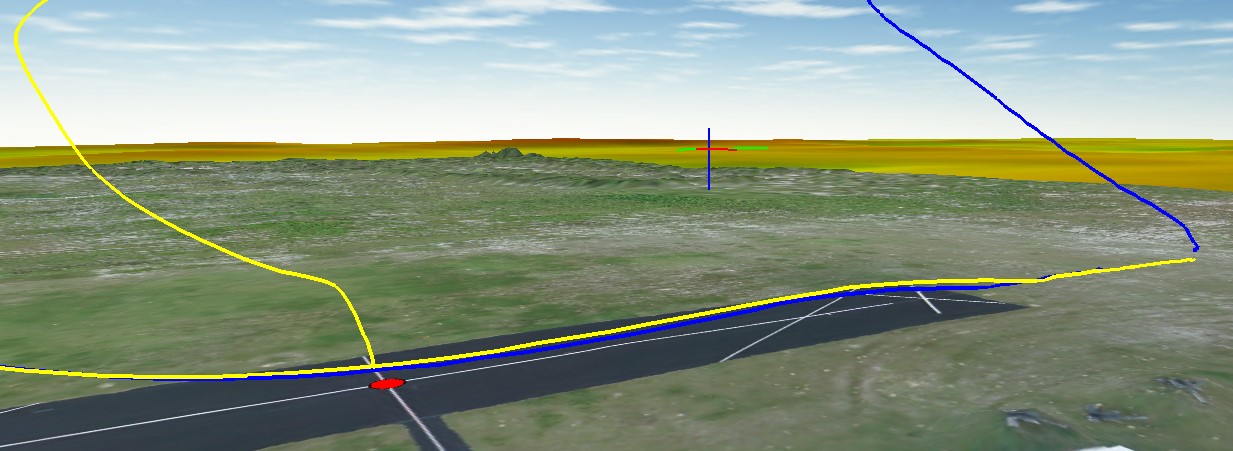
Figure 7: Detailed 3D View of System test landings
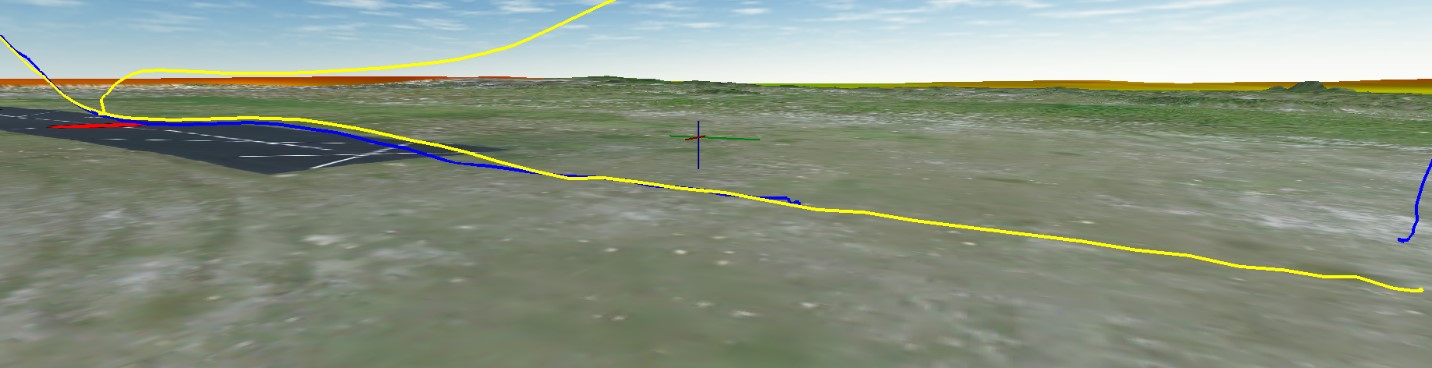
Figure 8: Another detailed 3D View of System test landings
Videos and logs of all the landings can be found here:
https://drive.google.com/drive/folders/1nUr7FypA2kKZzI-_-Hw76K1XY1ko_B1p?usp=sharing
Some observations and notes:
- Prior to performing the test landings we experimented MAINLY with the following parameters:
a. LAND_FLARE_ALT
b. LAND_FLARE-SEC
c. LAND_PF_ALT
d. LAND_PF_ARSPD
e. RNGFND_LANDING
f. TECS_LAND_SINK - We consistently overshoot.
- RTK fixed mode very stable – hence cm positioning was available during all the landing phases for all the test flights.
- Range Finder is rarely utilized/engaged above 2m… settings allow for use of Range Finder as primary height source at 70% of 12m.
Questions:
a. Why is there a separation in the procedure to determine horizontal land position coordinates and vertical position? When RTK is fixed the accuracy of a cm is virtually guaranteed and for all practical purposes the same in all three dimensions.
b. Why can’t one enter an absolute height for the landing position - like entering a latitude and a longitude?
c. Is it at all possible to land automatically at a position with an elevation that differs significantly from the elevation determined when the platform is armed? If so, what is the recommended procedure?
d. We are rather impressed by the consistency in the landing precision, but given the high accuracy of the navigational inputs – i.e. RTK fixed (1cm) and lidar range finder (also about 1cm) - why are we not getting touch downs much closer to the landing position? Is the flight controller fully utilizing the high degree of accuracy and the high confidence levels associated with RTK fixed solutions?