I’m having a pretty bad issue with my drone. Whenever I take it out, usually it will arm and fly for one flight, no matter how long(5sec-5min). Then, when I land it will not arm again and will give the message:
[19:27:56.355] Critical: PreArm: Check mag field (xy diff:118>100)
The first number(in this instance 118) does vary a bit, the highest I’ve seen is 158. This issue just started, and I’m not sure why or what caused it. Nothing really changed with my build. My specs are:
30a ESCs
3s 5ah LiPo
Matek H743-Slim
Matek M10Q 5883
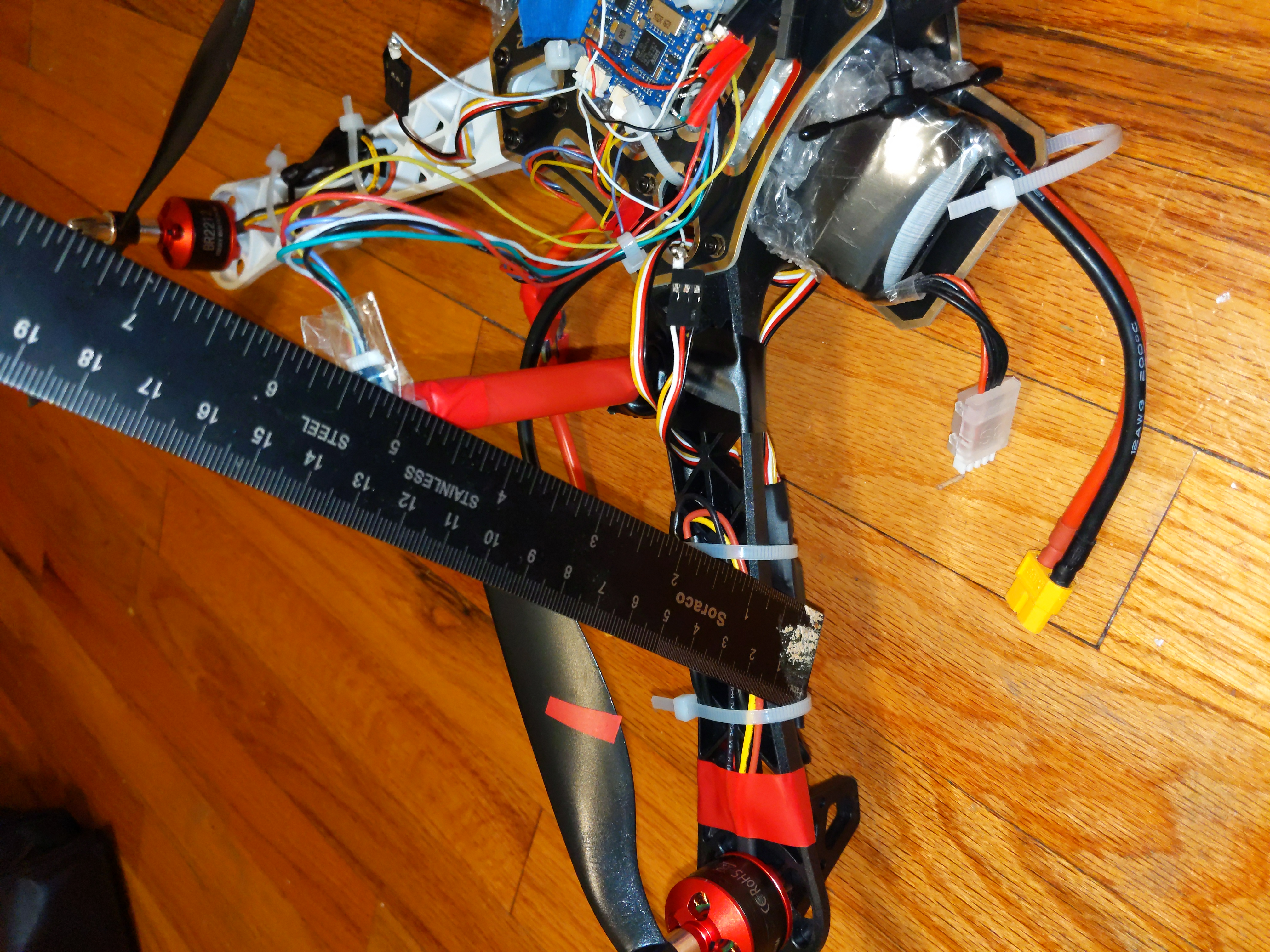
Attached are some photos of the setup. I’ve checked for motor/compass interference before, and noticed practically none. I’ve tried re-calibrating the compass so many times, but it either serves as a one-flight fix, or just doesn’t work at all.
Thank you very much for this idea. I’ve used MP’s magnetic interference testing and even at 100%(no props), it’s remained at less than 5% interference. This could, however, be environmental because I was flying off of a rooftop which had a few AC units one building down.
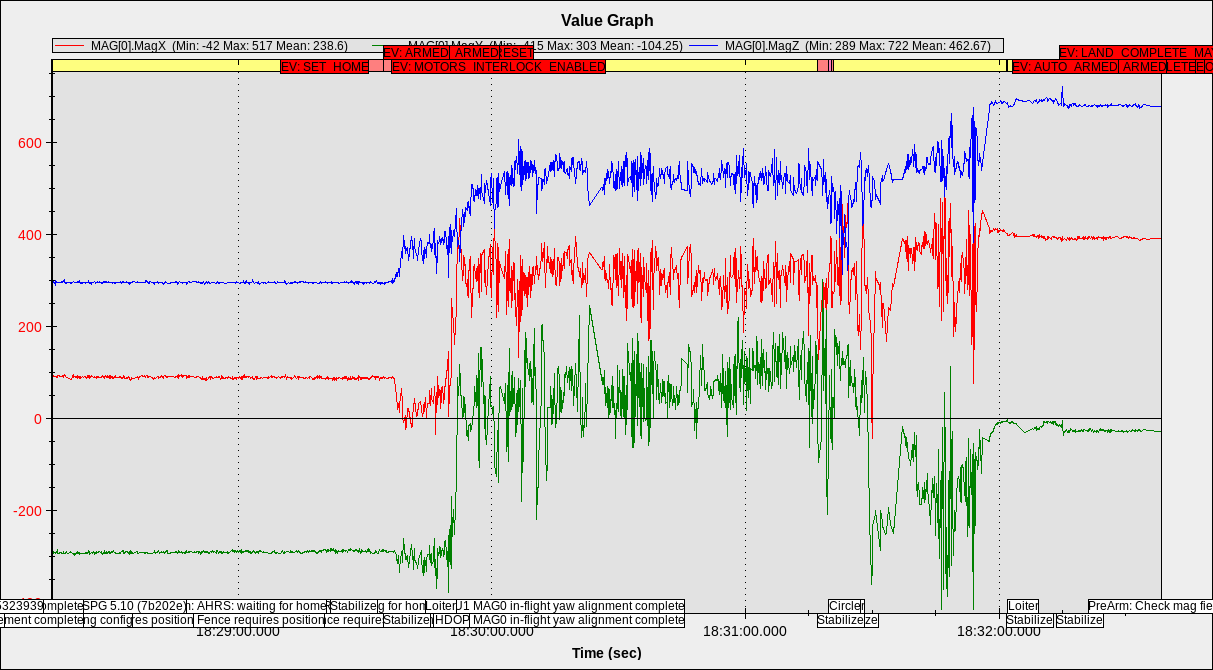
The magfit didn’t work. The drone flew the first arm, then refused to take off again. Here’s a compass graph of my last flight. Does it look like vibration is impacting the compass?
If you try calibrate your compass, compass vs motor interference calibration still had the same problem. The9/10 your compass position is too near interference source
Yeah I agree. The compass is 6 inches from motor and 5 inches from ESC. I’ll buy a proper motor mount instead of using this plastic boba straw and a zip tie lol.