I was flight my hexa, and sudenly the cube just shut down and fell like a rock.
My Setup is:
-Minicarrier
-Pixhawk black cube
-HereLink Air
-Mauch Current and Voltage sensor
-Mauch Power Source (it power the Power the Mauch sensor, and this one power on the Cube)
-5 and 12V BEC to power the HereLink and the camera systems (this time was with no camera).
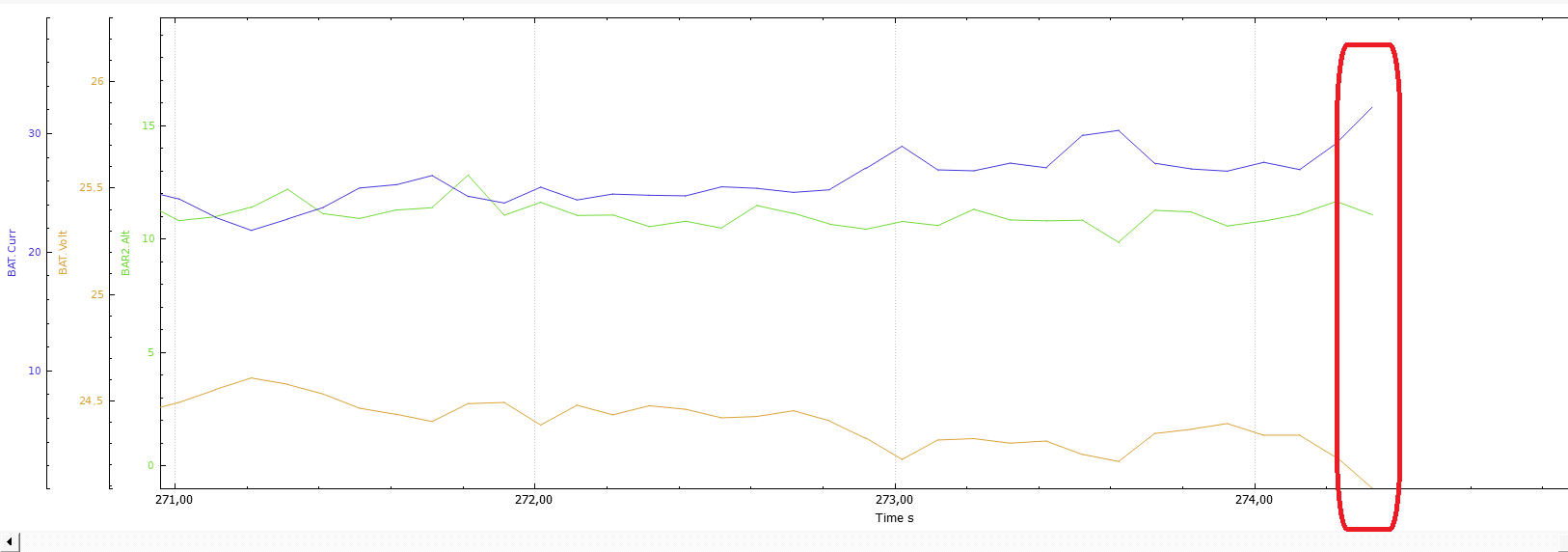
As you can see in the picture, the cube stop recording and 10 meters, that is what I saw more or less from the ground.
I dont see a current spike, thinking about a shortcut some where.
When the drone was on the ground after the crash, I hear a little sound from the speaker, like tok, tok, tok. The cube was energized, but like stuck. Some times I hear that sound when I plug the battery in and the cube doesnt boot, and i have to reconnect the battery.
I will apreciatte if someone can check the log, maybe there is something im not seeing.
From what I’ve experienced with the Cube, what you described sounds like the autopilot’s safety response to a short circuit. Without looking at the log, it most likely points to either a power or wiring issue (e.g. exposed wires coming into contact in mid-flight?).
Thats Im try to catch now. The drone flew almostr 40min before that, and days ago flew almost 3 hours battery after battery.
We are very carefully abuout the cables, because in fact i had some shirtcuts in the past, but as I know, its easy to catch because in the log you can see a very high spike on th currrent sensor.
I plug the drone again to the battery and every system starts normaly.
Sorry sir I don’t connect with sensor because this is a fully home made design so I’m confused how to power system and also I don’t have 6s pack so I make a 6s pack and connect with local plugs. And I disable a log file but after crash i was enable .
So now ??? Any action on this topic ?
Its sounds like your drone is very “homy made”, so as some one wrote it before, you need to check you wires, but overall, your homemade battery, may be the battery cound give the enough power to mantain the drone with all that payload, or your wires could “move” all the curren the drone was drawning.
You have to start to check how many amps can your motor take from the battery (and of course the voltage), then find some ESC what fit your motors.
But without the telemetry we are a quite blind. and the telemetry without a power sensor, looking for a power problem, is not very usefull.
May be you can post here the specs from your drone.
Ok sir today I wanna be fit sensor and make sure I’m right on my battery , perfect ESC on my motor and battery is enable for needed power , i can do this sir plz wait for few hours.
Thank you
The “tok,tok,tok” sound you hear is the flight controller not getting enough power to boot up.
Check your 5v supply to the flight controller and check the draw of all peripherals connected to the flight controller.
Better still, provide all peripherals with their own power instead of drawing it from the flight controller.
Sir I’m sure my ESC capable for my motor and also battery little bit like 86% on 100throttle and by mistake today I solder on sensor to add big wire but unfortunately his burn it out (some little pest stuck on pad and that time I can’t see this stuck pest after burning i was realize) , so now I’m buying new sensor ? And which one is best ? { And old is give to our city big microchip seller for looking that burn ic }
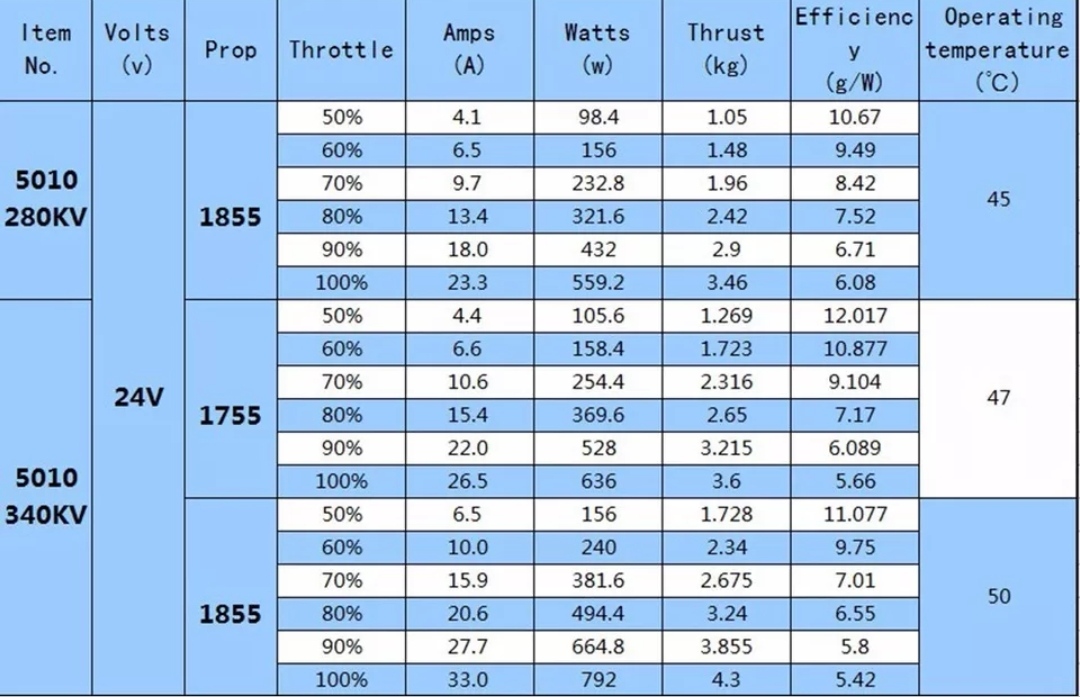
Motor data and I’m using 40A ESC i think his running smoothly
And I’m using 2 3s battery each battery is 10400mah and 20C and some time is heated like 50 to 60’c
I think 2 x3S battery are not enough for your drone. The max power from a 2x3 or a 1x6S voltage are 25.2, so with the power you need at 100% thr, you will be out of power very soon if you see the chart, your motors need 24V minimum to run ok. Did you measure the battery after the crash?
Yes sir , my custom battery work a normal like a 6s battery pack and after crash , first think my battery is over but I’m fail battery is still 24.5v because I’m not used more battery in that day. Here is a first flight , no problem but second flight is game changer.
And you can see that after takeoff payload copter change “yah” and after some second stable in normal position before tack off payload
Sorry sir I’m disable all safety reason like BRD_SAFTYENABLE = 0 set in my case also set ARMING_CHECK = 0 so I think can’t write parameters in sd card I’m right ?
To help you we need you enable your log recording, without that we are just asuming. Add to that the power sensor.
If you have measure your battery on the ground and give you 24.5, im pretty sure in the air with the payload, your battery was on 23.X. on the flight the voltage go down and the amps go up.
Thats what we need to check, and without log, we are blind here.
 .
.