Hello everybody,
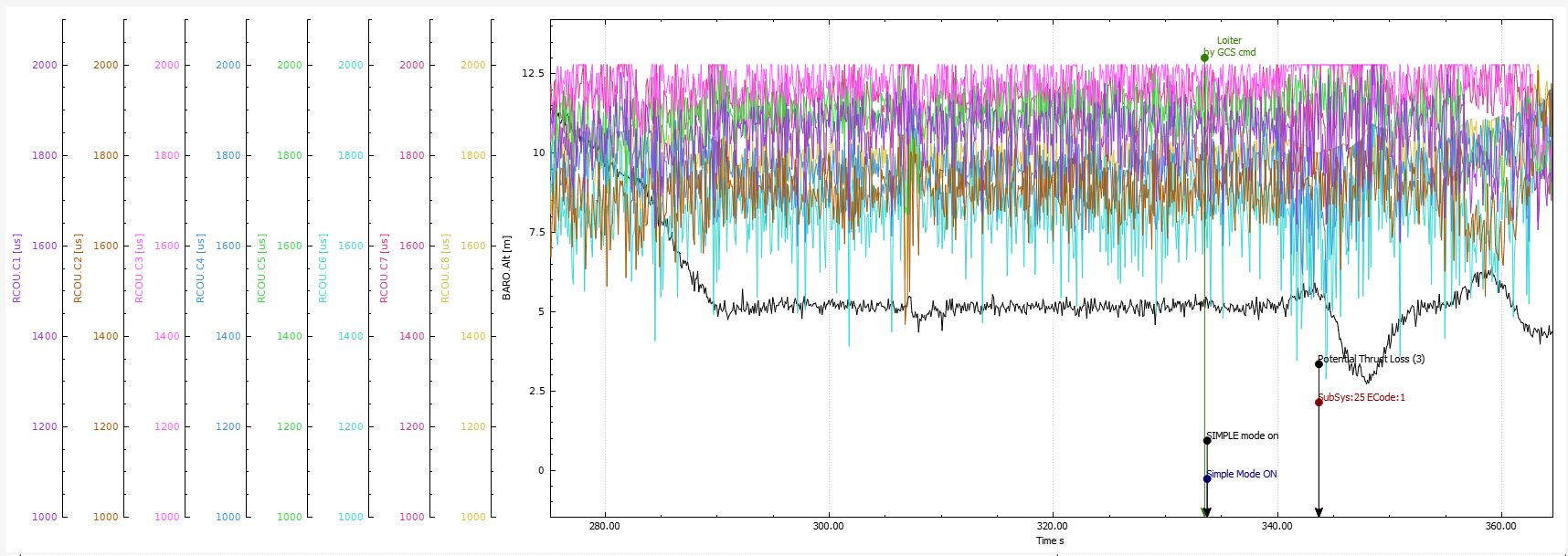
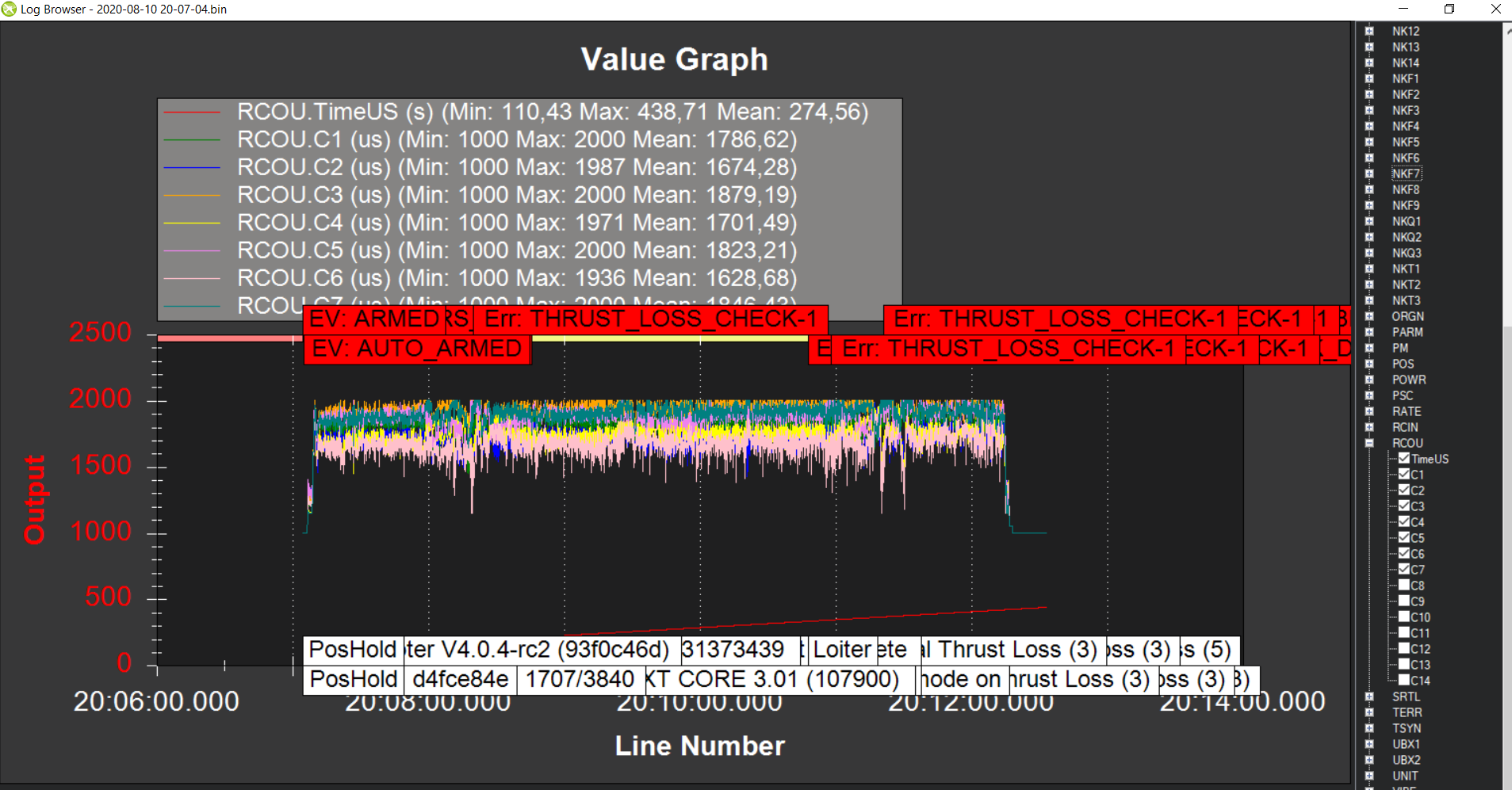
I made my first flights yesterday with the Cube Orange System and had to find out again and again that during the flight the message Potential Thrust loss suddenly comes up and the copter suddenly reduces the speed of the rotors and goes down by itself.
I have also noticed that the flight voltage is displayed too low after a few minutes of flight, even though it was measured with an external measuring device and is higher.
At the start of the flight, the voltage is displayed correctly in volts.
Does the whole thing have a connection?
That´s my last log file:
http://www.sonotonia.com/binfiles/2020-08-10%2020-14-59.bin