I am here to request your help. I hope this is the right forum for this.
I have been trying to fly my drone, and I triggered POS HOLD, but the drone shot to the sky and then fly out of range, after that, I panicked and crashed the drone. Could you help me to understand what happened?
The right thread would be the version of Arducopter you are running which is 3.6. But that log doesn’t really show what you are describing. It was only in AltHold for one instance and the barometer shows it didn’t leave the ground at that point.In fact by this log it didn’t change altitude by more than a few meters at any time. Several of your Flight Mode changes were refused because you did not have GPS lock. Describe this craft and the components on it.
After you switched to PosHold you can see what you are describing. I don’t see a definitive answer as to why. Z-vibes are a bit high but very few clipping events. Tuning is poor but you are on default parameters and haven’t followed the basic tuning guidelines for the craft so no surprise. Hover thrust from learning was increasing rapidly during the ascent so maybe it was too low to start with.
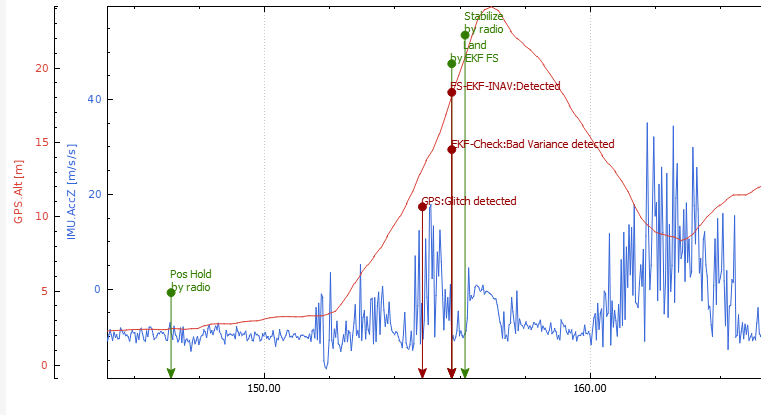
Your accelerometer either got loose, or went bad. It shows readings all around which made EKF crazy and believe that it is sinking, therefore the command to raise altitude. eventually the EKF detected the faulty situation and initiated failsafe and land, but then you switched back to stab and crash.
I made some necessary tuning, which made the copter fly smoothly on stabilized mode. Then I attached the drone to rope just in case and tried alt hold again and tried ALT HOLD with the same results where the drone climbs uncontrolled. Here are two logs of two different flights where this happens:
Are there some calibration things I should still do, or is there a way I could test the sensors before accepting that I need to buy a new navio2 board (I have to admit I crashed it quite a few times)?
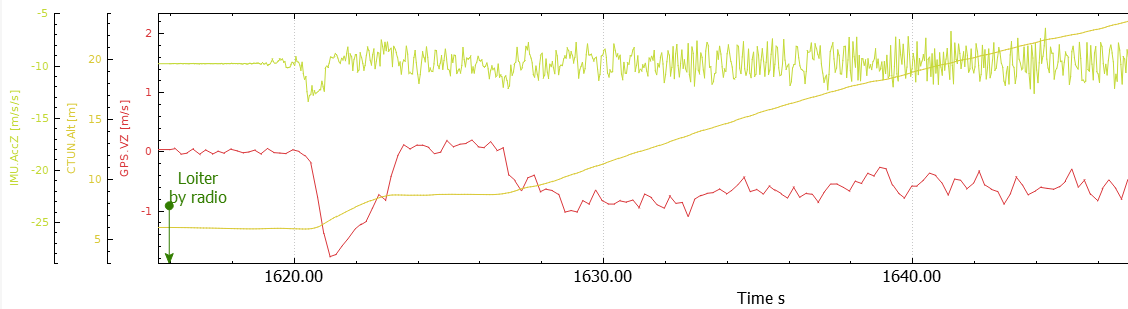
The accelerometer data on Z axis does not make sense at all. It constantly shows less than 9.8m/s/s which indicates that the copter going down. The EKF vertical speed calculation shows constant descent because of this. And this is the cause why copter shooted to the sky when you switched to alt/pos hold.
I would say it is a faulty accelerometer (unfortunately you have only one onboard, so there is no reference). But this only my opinion…
Vertical acceleration generally relates to Z axis vibes and you have identified an anomaly with it not showing as much -ve travel as positive.
Is something hitting the board?
Especially on acceleration up?
It is probably worth doing a full accelerometer calibration and seeing how the range looks after that.
Motor3 output is higher than the rest so make sure your craft is balanced and hang the rope from the centre