I’ve had one other report of that, and it was caused by Q_M_PWM_MIN and Q_M_PWM_MAX both being set to zero.
Please post a bin log while running a motor test with LOG_DISARMED=1 to help diagnose
Hi Tridge, thanks.
Q_M_PWM_Min/Max were set at 0/2000 and all was well on 4.1.7
Q_M_PWM_TYPE = 0
SERVO[1-4]_Min/Max 1100/1900
This log has a motor test + arming in QStabilize before and after changing Q_M_PWM_MIN to 1000 (from 0) and leaving Max at 2000.
To clarify my situation - this was the fix for me.
It worked with q_m_pwm_min/max as 0/2000 on Plane 4.0.9 and 4.1.7
Flashing 4.2.0beta5 and 4.2.1 stable caused bizarre behaviour with the quads
Changing min/max to 1000/2000 resolved it.
I did need to redo Q_ESC_CAL though, because after flashing the new firmware and changing to 1000/2000us only 3 motors responded
So if you are using regular pwm then the limits should be something like 1100/1900 - 1000/2000 only applies to dshot. My mistake the defaults are 1000/2000 and should generally be left at that. Needing to re-calibrate after an upgrade is something I have experienced before.
Today I upgraded my OctoPlane to 4.2.1 from 4.1 last stable release and found that my relay camera trigger function no longer works. I know it was working with 4.1 just before I upgraded. Is there a change that in the config on how these are setup? I am running a Holybro Pixhawk 4 using GPIO pin 57 with a high to trigger the Relay.
Just found the problem. I missed the changes in the doc on the GPIO changes in 4.2. Changing the servo function to -1 and then rebooting solved the issue. It is now working again. Thanks for all the great work in this project…
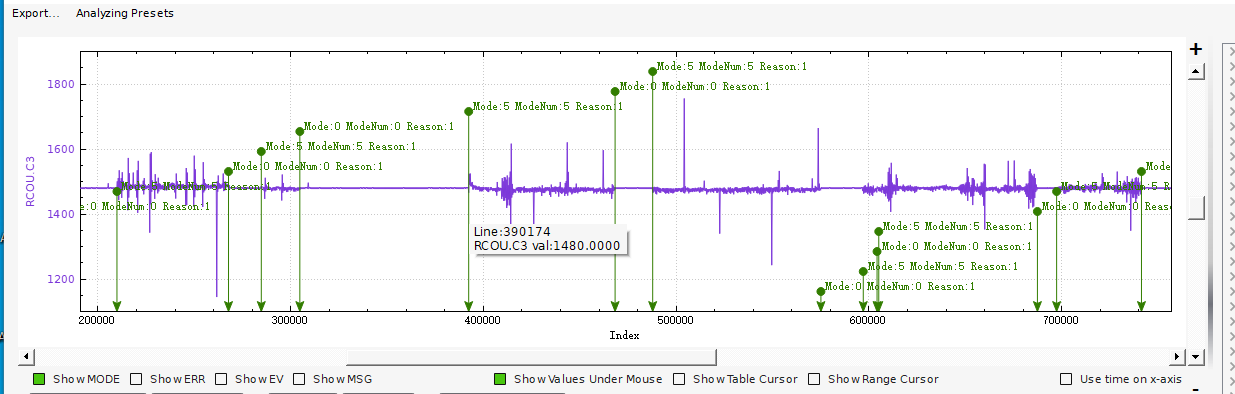
he mini talon servo vibrates after a while in FBWA mode, but the manual mode is normal, I took it home and tested it again found it‘s normal. I checked the records and found that there is indeed a pulse in the SERVO OUTPUT. could you please check the reason? thanks
I am trying to perform a Terrain Following flight using a VTOL. I followed the steps from here Terrain Following for Plane . TERRAIN_ENABLE = 1 and TERRAIN_FOLLOW = 1.
I loaded the terrain data to the APM/TERRAIN folder in the SD card, but when I want to check the current altitude (when preparing the flight plan), no terrain data is available. See figure below:
It happends also when GPS i fixed, with more than 10 satellites. Any help on this issue?
I think you are out of memory and the terrain subsystem is failing to startup.
Please change LOG_FILE_BUFSIZE from 50 to 25 to recover 25k of memory and try again
I tested changing this parameter and it works well! Thank you a lot and count with me if you need testers for next improvements (like Precision Landing using IR-Lock beacon for Quadplane or whatever).
I am looking to program a mission where the drone would take off, land, disarm, wait 5s, rearm, and take off automatically. Like in this video : https://youtu.be/BK3OsNJoF8A
I don’t have any problem when I do this kind of mission on Arducopter. But, with Arduplane 4.2 the drone “refuses arming in AUTO when in a landing sequence due to a failsafe”. Has anyone had the same problem ? Is there anything special I should do, or something I’m doing wrong?
Hello i,m having problems since i updated from 4.2 to 4.2.1
My plane refuse to activate properly auto take off when it,s inside an auto mode, the plane only acelerate slowly until 20 % more or less and then stop and the osd saw that mode it,s working
I have to configurate take off as a mode separate and then when the plane is in the air engage auto
I,m using a matek h743 v1 wing