So if you are using regular pwm then the limits should be something like 1100/1900 - 1000/2000 only applies to dshot. My mistake the defaults are 1000/2000 and should generally be left at that. Needing to re-calibrate after an upgrade is something I have experienced before.
Today I upgraded my OctoPlane to 4.2.1 from 4.1 last stable release and found that my relay camera trigger function no longer works. I know it was working with 4.1 just before I upgraded. Is there a change that in the config on how these are setup? I am running a Holybro Pixhawk 4 using GPIO pin 57 with a high to trigger the Relay.
Just found the problem. I missed the changes in the doc on the GPIO changes in 4.2. Changing the servo function to -1 and then rebooting solved the issue. It is now working again. Thanks for all the great work in this project…
1 Like
he mini talon servo vibrates after a while in FBWA mode, but the manual mode is normal, I took it home and tested it again found it‘s normal. I checked the records and found that there is indeed a pulse in the SERVO OUTPUT. could you please check the reason? thanks

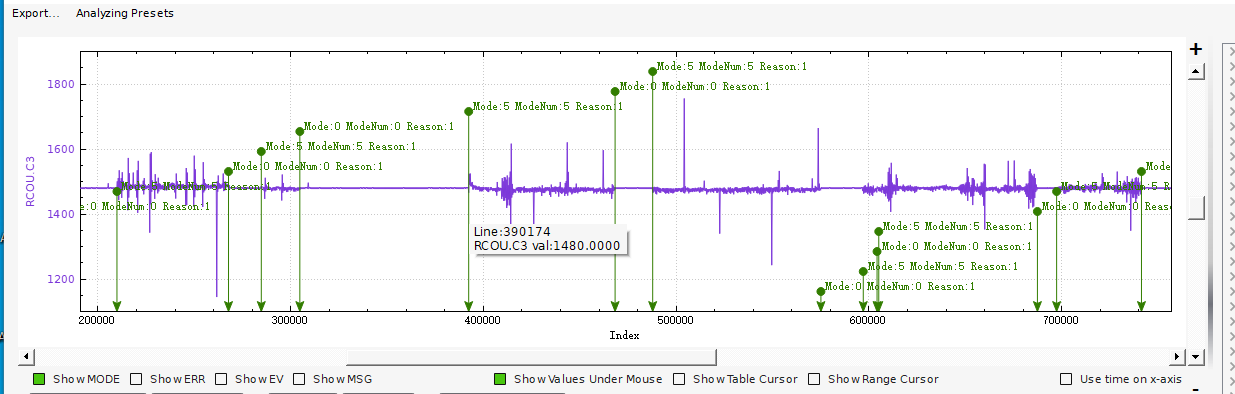
the log:
https://drive.google.com/file/d/1WpGAD00Fb_ScYtk2QeBs6h3i5o-YTvAq/view?usp=sharing
Hello there,
I am trying to perform a Terrain Following flight using a VTOL. I followed the steps from here Terrain Following for Plane . TERRAIN_ENABLE = 1 and TERRAIN_FOLLOW = 1.
I loaded the terrain data to the APM/TERRAIN folder in the SD card, but when I want to check the current altitude (when preparing the flight plan), no terrain data is available. See figure below:
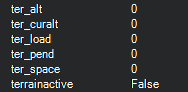
It happends also when GPS i fixed, with more than 10 satellites. Any help on this issue?
Thank you so much.
show us a tlog from the GCS and we can see if ArduPilot is sending TERRAIN_REQUEST messages to the GCS.
I think you are out of memory and the terrain subsystem is failing to startup.
Please change LOG_FILE_BUFSIZE from 50 to 25 to recover 25k of memory and try again
Hello!
I tested changing this parameter and it works well! Thank you a lot and count with me if you need testers for next improvements (like Precision Landing using IR-Lock beacon for Quadplane or whatever).
Eduard
1 Like
Hello,
I am looking to program a mission where the drone would take off, land, disarm, wait 5s, rearm, and take off automatically. Like in this video : https://youtu.be/BK3OsNJoF8A
I don’t have any problem when I do this kind of mission on Arducopter. But, with Arduplane 4.2 the drone “refuses arming in AUTO when in a landing sequence due to a failsafe”. Has anyone had the same problem ? Is there anything special I should do, or something I’m doing wrong?
Hello i,m having problems since i updated from 4.2 to 4.2.1
My plane refuse to activate properly auto take off when it,s inside an auto mode, the plane only acelerate slowly until 20 % more or less and then stop and the osd saw that mode it,s working
I have to configurate take off as a mode separate and then when the plane is in the air engage auto
I,m using a matek h743 v1 wing
hi Ivan, please upload a log and add a link to it here.
at the moment this needs a lua script in planes. This PR will make it possible without a lua script:
1 Like
I had a look at the log and the problem is you have the parameter TKOFF_THR_SLEW set to 20. That means a maximum slew rate for the throttle in takeoff of 20% per second, which means it would take 5 seconds to reach 100% throttle, which is too slow, and the plane doesn’t manage to start flying before it hits the ground.
Set TKOFF_THR_SLEW to 0 to disable the slew, or at least 100% for normal operation. Max is 126%, or 0 means unlimited
It isnt the problem i set It like that to not generate a spike in the esc
It works for a year with this parameter

I’ve just released 4.2.2beta1. This includes quite a few changes since 4.2.1:
The changes are:
- support two full harmonic notches using the INS_HNTC2_ parameters
- adjust neopixel bitwidths for better reliability
- fixed EKF3 replay bugs that caused poor replay fidelity
- added BLHeli_S ESC type in SERVO_DSHOT_ESC
- reduced min lean angle for alt-hold in quadplanes to 5 degrees
- fixed param ftp run length encoding bug
- reduced default quadplane rate accelerations and XY position gains
- improved parameter checks of Q_M_PWM parameters for bad conversions
- added Q_NAVALT_MIN parameter for min alt to start attitude control in takeoff
- added CAN_Dn_UC_POOL parameter to control DroneCAN pool size, to allow memory saving on F4 boards
- saved hardfault crash dumps to microSD if detected
- fixed PWM rangefinder bug and support SCALING parameter
- updated OSD flight modes menu for newer modes
- preserve new rangefinder addresses on VL53L1X
- protect against hardfault on bad CRSF frames
- handle reset of CRSF receiver in flight
- added MambaH743v4 and MambaF405 MK4
- fixed fault on FFT init with ARMING_REQUIRE=0
- synced quicktune lua script with latest version
- learn MAVLink routes on private channels
Please report any issues with the beta. Happy flying!
Good afternoon,
First of all, thank you for your answer.
I have been looking at a version with a lua script. I can almost do the mission. However, the prearm check :
if (plane.mission.get_in_landing_sequence_flag()) {
check_failed(display_failure, “In landing sequence”);
ret = false;
}
always prevents me from rearming. I haven’t managed to find a solution to this problem yet, do you have any tips for me?
The PR you shared seems to fix my problem, will it be integrated to the stable release soon?
I’m sorry this is probably not the best topic for this question, but answering your message seemed more relevant/more practical.
Thank you in advance
After upodate to 4.2.2 beta1 several flights with 2 aircrafts (FC: F405 Wing, F765 V1) in Manual, FBWA, Autotune, Cruise, Loiter, Acro and Auto including Lua-Acrobatic-Scripts were executed without any problems.
Thanks to the developers
thanks Rolf, much appreciated!