Pitifully, I crashed my quadplane yesterday. I am very interested to discover the causes. The problem occurs in the last part of the landing process. I tried the new QRTL mode 3 (Q_RTL_MODE = 3), with the last firmware 4.1.4. As you know in the new method exists the “airbraking” phase in order to make a fix wing approach.
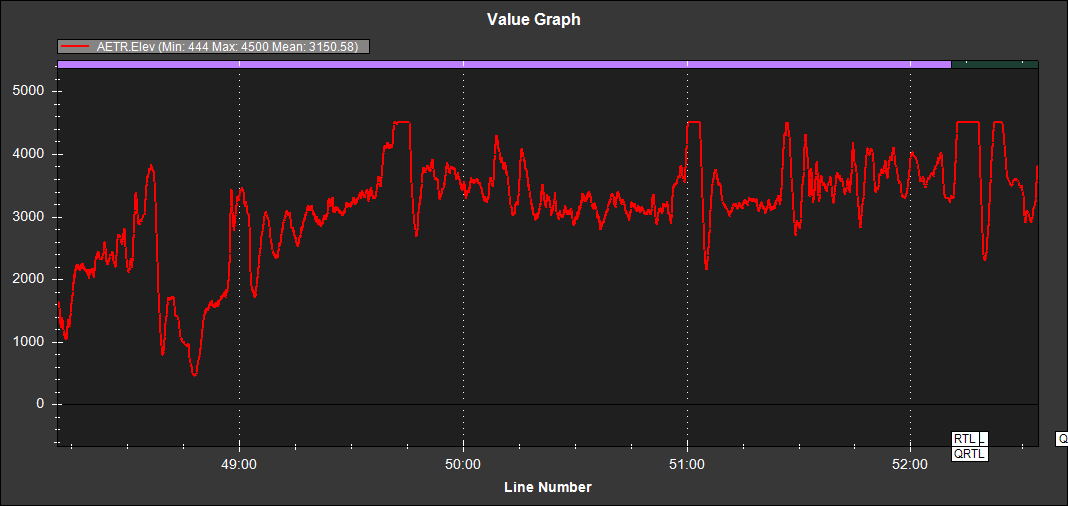
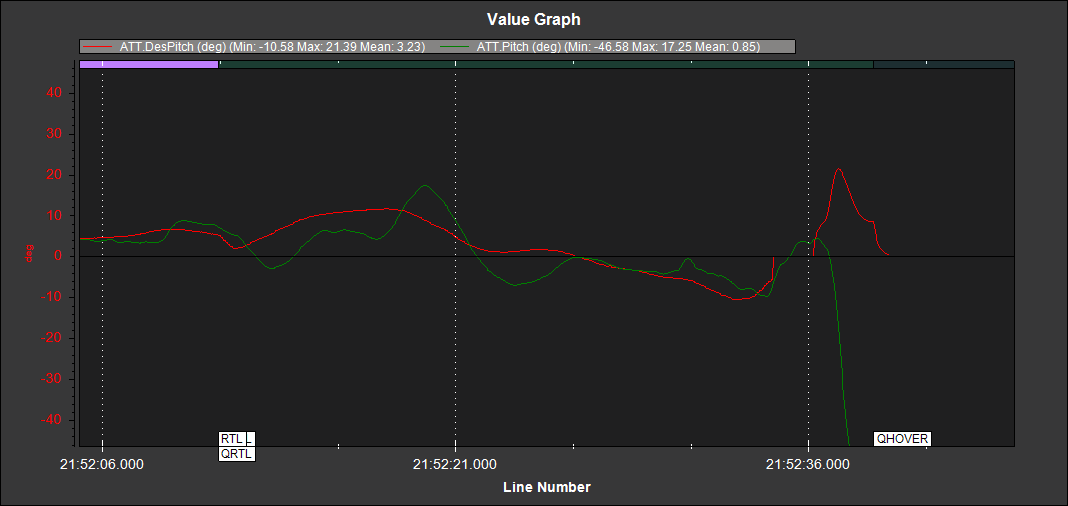
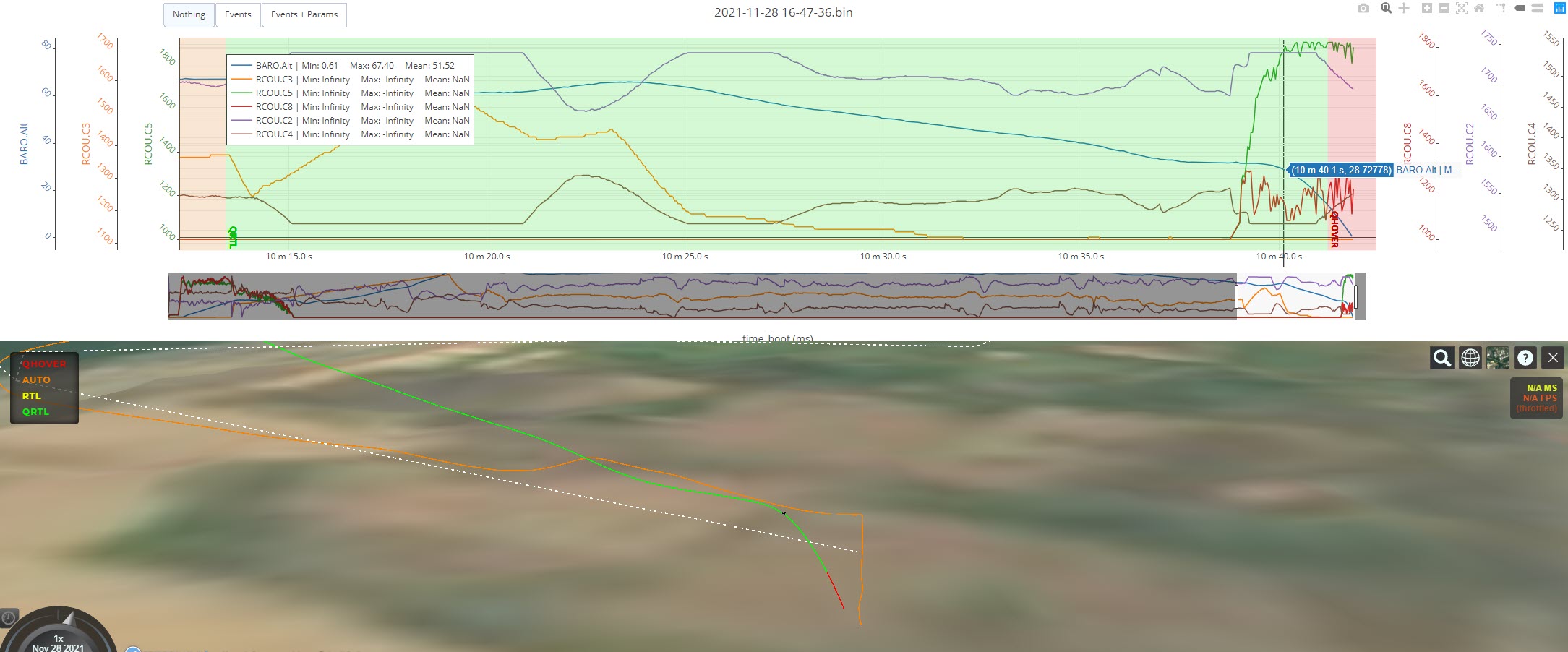
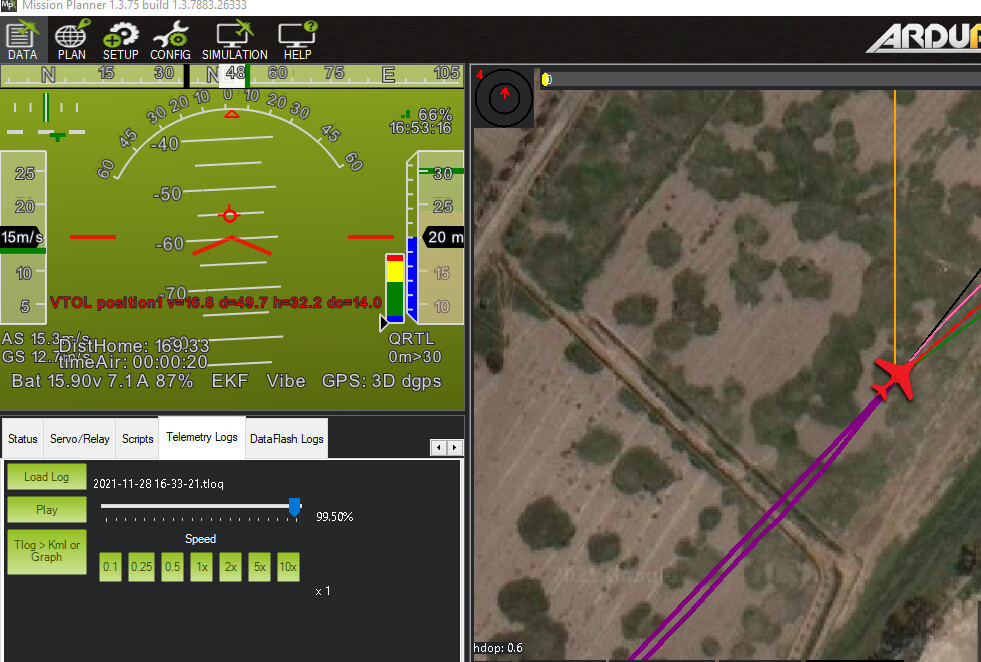
The plane reached to ALT_HOLD_RTL (65) in good shape, made the first “airbrake” to 80m from home and altitude to 34m ( v=18.1 d=80 sd=81 h=33.8), at this moment the forward motor begin to stop. The Q_RTL_ALT parameter was defined at 20m, but the plane maintain an altitude of 30m for a few seconds. The problem occurred when reaching the VTOL POS1 position (v=16.8 d=49.7 h=32.2 dc=14.0); The plane pitch down suddenly. As you see in the next graph the nose was down all the way (behavior channel C2 and C4, Vtail). In the same way, the quad motors were activated, the front ones (channel C5 and C7) push higher in order to do a final “airbraking”, I think. But the inertial was too high and the plane go strain to the ground. I tried to change to QHOVER mode in order to get out manually the situation but was not enough. The plane crash to the ground at 23m/s, the plane is destroyed.
Here is the time when reached the VTOLPOS1 position and pitch down the nose.
One last detail, when I made the mission I forget to change the command TAKEOFF to VTOL TAKEOFF and RETURN TO LAUNCH to VTOL LAND. The takeoff process was as VTOL, without issues, but the landing was a disaster.
Maybe can improve the Mission builder process, due to VTOL command only being enabled when the quadplane is connecting to MissionPlanner. So, if you work your mission in the office you cannot complete the takeoff and landing part.
Here are my BIN data and parameters, hopefully can review it and give me some clue about source of the problem.