I set the Servo_BLH_RVMASK=1 and it doesnt do anything. Besides just notice that the ESC telemetry is also not working. It is working in the 4.0.9!
Why do I have to change the parameters that were working for the 4.0.9 ? Wasnt suppose to be compactible? I am getting confuse now with the parameters meaning!
The bin file that I posted is not the bdshot version. Anyhow I uploaded the Bdshot version with same parameters to give a try and this version is just a mess ! The ardupilot sets a Failsafe when it starts, the transmitter is not getting the S.Port passthorght telemetry and I believe somehing is wrong with the RCIN (maybe not decoding) and I have no controls.
My apologies for the confusion on this, I should have included this in the 4.1 release notes. The BLHeli/DShot systems have completely changed, and it does not properly convert some options (including reversal) from 4.0. @andyp1per is the expert on this, so I’ve tagged him in case he wants to comment.
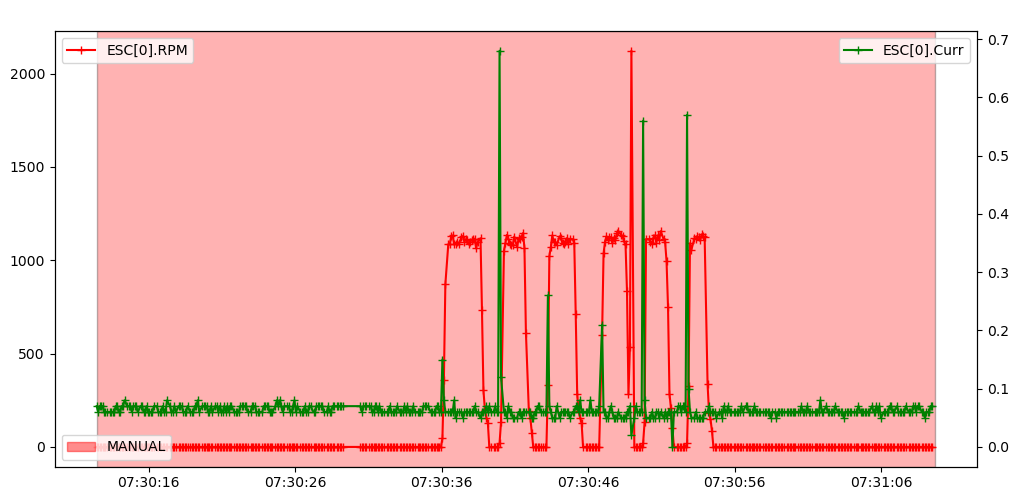
Regarding ESC telemetry, it does appear to be working in the log you sent me. For example, here is a graph of your RPM and current from that 4.1.1 log:
what aspect of ESC telemetry are you not seeing working? If this is a GCS display problem then please send me a tlog so I can look at what your GCS is receiving.
For the bdshot version, bi-directional DShot is still experimental in 4.1. I’ll leave @andyp1per to comment on that if he can for your MatekH743 board.
Cheers, Tridge
For 3D operation (which is what you are referring to with reverse) SERVO_BLH_3DMASK is the correct setting, it has the same parameter index as the old SERVO_BLH_REMASK so no parameter conversion necessary, if its not working then its likely a bug.
The bdshot version of the MatkeH743 board needs to use the RCIN timer for bdshot, so on this version you must configure a UART for RCIN
Hi @andyp1per ,
I follow your instruttions and set the F.Port for the radio input, as before I have it the RCIN and the S.Port for the frsky passthrough. Its works but just for ~30 seconds, sometimes some minutes other times just 2 or 3 seconds. Ardupilot set the radio failsafe and I loose the controls and the telemetry. Fortunatly I was able to log this trouble: https://drive.google.com/file/d/1ctvXtQA2fnTl1EFX7IxzHgWgI4WfpR_f/view?usp=sharing
This issue I reported before already during the beta testing → Help about using dshot on tail rotor - #31 by Pedro_Claro
and here → S.PORT and F.PORT not working in Beta5 . I feedback that it was working but I only tested the S.Port never did for the F.Port. In a few moments I will load the non BDshot version to check the F.Port behavior and let you know if this issue is applicable also for the non BDshot. This is a MatekH743 and I use the Holybro Tekko32 BLheli32.
BTW I was able to run the motor and reverse it when instructed, and the motor is running the right direction and also the esc1:rpm is showing in the screen.
Just tested and here are the findings for the FW non BDshot 4.1.1 (also important to @andyp1per) :
If you set the SERVO_BLH_REMASK=1 motor rotates in opposite direction and Esc1:rpms will show in Mission Planner. But if you set SERVO_BLH_REMASK=0 motor reverses the rotation direction but Esc1:rpms will NOT show in Mission Planner!
Unfortunatly the F.Port has the same behavior as the BDshot version, only works for a few secounds or sometimes few minutes and radio Failsafe shows in the screen. There were at least 2 times that the AP crashed and I could not reboot it from Mission Planner. So the motor and the reverse mode is working fine in both versions but the issue now is related to the F.PORT.
Just repeat this test again and I see its working now, this is very odd, sometimes works other times does not show in Mission Planner the rpms (only shows 0). I have the build 1.3.7947.6025
when it shows zero, does it still show voltages and current?
I’m wondering if we’re getting a negative RPM?
also, when it doesn’t show in MissionPlanner, does it still show correctly in the onboard BIN log? Look for the ESC message.
I also though about that but when reversing it shows also the rpms (positive). Here is another bin file where I could catch the F.Port issue. Mission Planner was showing the rpms and in the logs I can see also the rpms, in principle is working. But let me keep repeating the test to see I can catch when the rpms are not showing in the screen. https://drive.google.com/file/d/1RfiT2-3m7bCiMM-aShixNIIiMfsgmNHs/view?usp=sharing
@Pedro_Claro, I noticed a change in the “instance” of my ESC when moving to 4.1. More specifically, my aux 1/2 chanels were no longer “ESC1&2,” instead they were ESC 9&10. Maybe check the other ESC numbers in Mission Planner. I don’t have problems with that.
Improvements: Ready to Arm from a cold boot is definitely under 30 seconds. That’s fast.
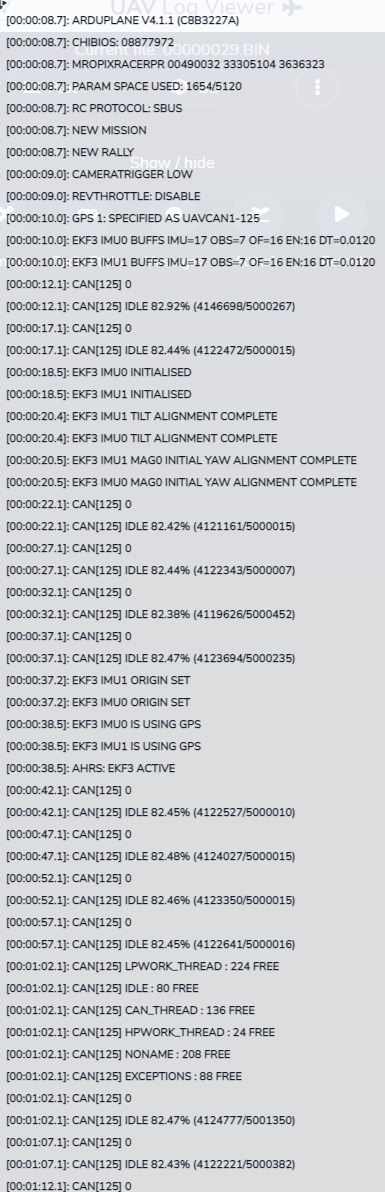
I’d recommend setting the default parameters to include FBWA as reverse thrust capable (as it’s effectively manual throttle anyway). I’m getting a TON of CAN messages in my logs now, and I don’t really like it. Oh well I guess. Camera triggering and feedback appears normal. Do you see anything else obviously wrong here @tridge?
yes, it is a bit annoying. Those are debug messages from the Here CAN firmware. It would be nice if CubePilot could do a new fw release that removed those. You didn’t see them before as we just ignored CAN debug msgs, whereas we now log them, which can be very useful for diagnostics.
that log ‘2021-10-13 22-59-21.bin’ has quite a few param changes over the previous 4.1.1 log you sent. The key one is that it has SERVO_BLH_TRATE=200, which is way too high. The telemetry is at 19200, you can’t fit 200Hz data at that rate, even with only a single motor. Drop it back to 20Hz.
I will set it down to 5Hz. Do I have any advantage in using the BDshot when using the single ESC Rpm for the Harmonic Notch ( for single motor in plane or Heli)?
Right now the F.Port is not working, so I will kept the RCIN + Sport for the receiver. Any advice?
Hi @tridge , Hi @andyp1per ,
Like said the F.Port feature is not working and this was reported before during the Beta testing.
Already provide several logs, Let me know if you need more support from my side. Thank you!
Here you are! The bin and Tlog for the rpm issue not visible in Mission Planner and also not logged in the bin file. I drop the SERVO_BLH_TRATE=20 as you ask, Still the issue is there.
 ! The ardupilot sets a Failsafe when it starts, the transmitter is not getting the S.Port passthorght telemetry and I believe somehing is wrong with the RCIN (maybe not decoding) and I have no controls.
! The ardupilot sets a Failsafe when it starts, the transmitter is not getting the S.Port passthorght telemetry and I believe somehing is wrong with the RCIN (maybe not decoding) and I have no controls.