send me a log file and I’ll have a look
hi tridge I’m sharing link here with drive
https://drive.google.com/file/d/1QgMr14tq3UfweZANhiJs2fzZEkytAC2N/view?usp=sharing, https://drive.google.com/file/d/1Yl2G_1YH4o30uXzbblImaRu_HA0ow-vF/view?usp=sharing, https://drive.google.com/file/d/1sDXcj7tVBdUOY7h7utPJup9FAAQWNd4v/view?usp=sharing
@tridge Thank you your support now I’m almost clear on what’s happening on various stages of VTOL Landing and i got quite transition point but still model didn’t land i don’t know why because of simulator ? in real time this may perform correctly ?
05-Oct-21 6:02:47 PM : SIM Hit ground at 0.982719 m/s
05-Oct-21 6:01:59 PM : VTOL position2 started v=9.4 d=4.3
05-Oct-21 6:01:54 PM : VTOL position1 v=15.1 d=41.9 h=52.2 dc=15.8
05-Oct-21 6:01:53 PM : VTOL airbrake v=20.7 d=71 sd=72 h=51.4
05-Oct-21 6:01:46 PM : VTOL approach d=217.9
05-Oct-21 6:01:46 PM : Mission: 12 Land
05-Oct-21 6:01:46 PM : Reached waypoint #11 dist 0m
05-Oct-21 6:01:31 PM : Mission: 11 WP
05-Oct-21 6:01:31 PM : Reached waypoint #10 dist 71m
05-Oct-21 6:01:17 PM : Mission: 10 WP
05-Oct-21 6:01:17 PM : Reached waypoint #9 dist 70m
05-Oct-21 6:00:40 PM : Mission: 9 WP
05-Oct-21 6:00:40 PM : Mission: 8 LandStart
05-Oct-21 6:00:40 PM : Landing sequence start
05-Oct-21 6:00:40 PM : Mission: 9 WP
05-Oct-21 6:00:40 PM : Mission: 8 LandStart
05-Oct-21 5:59:26 PM : Mission: 7 LoitUnlim
05-Oct-21 5:55:34 PM : Transition done
05-Oct-21 5:55:31 PM : EKF2 IMU1 MAG0 in-flight yaw alignment complete
05-Oct-21 5:55:31 PM : EKF2 IMU0 MAG0 in-flight yaw alignment complete
05-Oct-21 5:55:29 PM : Transition airspeed reached 18.1
05-Oct-21 5:55:26 PM : Takeoff to 50m at 0.0m to -118.1 deg
05-Oct-21 5:55:26 PM : Triggered AUTO. GPS speed = 0.0
05-Oct-21 5:55:26 PM : Armed AUTO, xaccel = -0.1 m/s/s, waiting 0.2 sec
i was kept WP before the landing point at 220m away and when it that waypoint it gave me message the VTOL Approach d=217m and vtol airbrake d=71m now I’m clear about it
[quote=“tridge, post:32, topic:76507”]
but is great for coming back and landing from anywhere
but this QRTL makes worried to me. why because if i command QRTL it start decent to Q_RTL_ALT from current altitude while moving forward.
if QRTL would activate from long distance this may cause altitude crash issue(incase high buildings or terrain like above Q_RTL_ALT). If Q_RTL_ALT set too high there will be risk of more time to land and too much battery consumption.
can you give me any best solution on this?
.
For the 4.1.0 stable there is no firmware with bootloader for a Matek F765-WSE. What firmware with bootloader can be installed there? I already want to use (plane) stable 4.1.0.
Why is the directory in the firmware section actually called “MatekF765-SE” and not “MatekF765-WSE” as the product is called?
Hi tridge,
The P of the PID become very big value after autotune,and the plane crash after next flight as soon as take off.
My minitalon flys ok and have performed an autotune and check evey thing is ok ,the p of the pitch PID is about 0.27.then I put it at the hourse and do not change any parameters.
I had a flight several days later and found the plane nose up and down in the air,I had check the CG before take off. So i make autotune in the air ,the plane go stable again then land the plane.
then I change another battery and fly again,but the plane crash as soon as it take off.
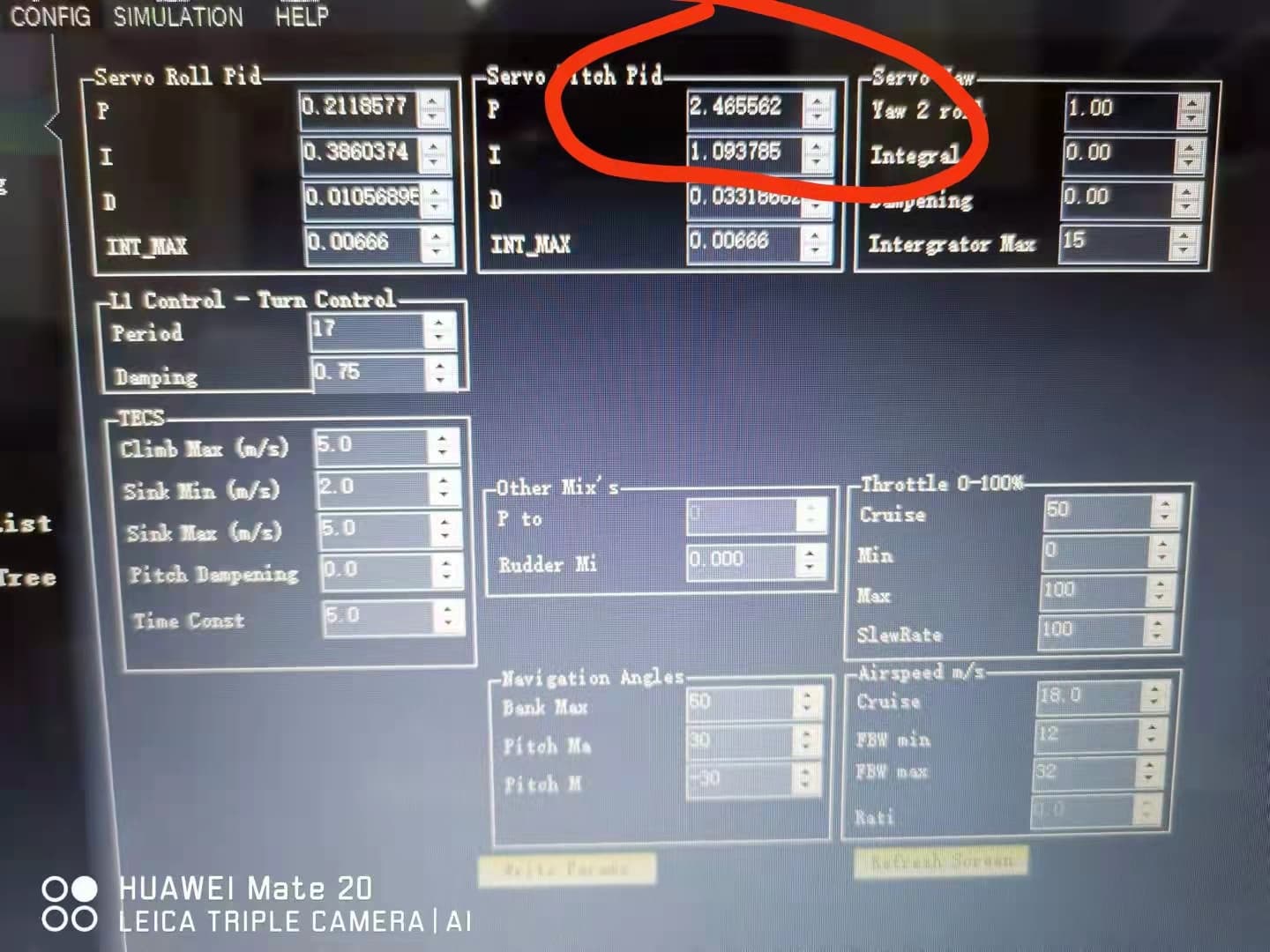
After the crash,I connect the FC to mission planner ,and found the P of the pitch PID is much higher,about 2.4,this is quite abnormal,why the P of the pitch PID become so high after autotune.
Can you check my replay log along with the video to find the problems, thinks
FC is mayatek F765-wing,firmware is 4.1 beta 8.
the first flight of the day:

the second flight of the day

Please download the log from google driverhttps://drive.google.com/drive/folders/1wHvFSUL_xUWf-GHtEMuUVUTdwd1IIOEj?usp=sharing
@tridge
1 Like
Thank you very much for reporting this! You have found a bug in the AUTOTUNE logic which can lead to saving of temporary values if you exit autotune at a particular stage of the tune. I have fixed it in this PR:
After testing I will release this fix in a 4.1.2 stable release
This has been fixed in the 4.1.1 release

I have released stable version 4.1.1. This is the a minor bugfix release in the 4.1.x stable series. Changes are:
- fixed IMU orientation on QiotekZealotF427 controller
- fixed lua scripting bug in logging of strings
- fixed an initialisation bug in the attitude controller for quadplanes
- added desired values to PSC quadplane pos control logging
- prevent entry into CRSF parameter mode while armed
- added bootloader to build for MatekF765-SE
Thanks to all the users who have been reporting back on flights with
4.1.0, and happy flying!
1 Like
exit autotune at a particular stage of the tune.
What is a particular stage of the tune?can you tell how to exit AUTOTUNE for preventing temporary high values?I hope continue to flight before 4.1.2 released.
Hello!
I think it would be a nice feature to have - receiver diversity:
Possibility to add several rx’s with RCIN protocol, and ardupilot takes control from one is not in FS mode.
If all receivers reported FS - go to failsafe mode.
Regards!
Hi @tridge , I did try to update to FW 4 .1.1. but got error message: “Failed download…”
How to solve this error?
Tks
I have just released 4.1.2beta1 to fix this AUTOTUNE bug. I expect to release 4.1.2 stable soon once more testing has been done.
Hi @tridge ,
Today I update my planes to the 4.1.1 and unfortunatly the motor reverse function is not working.
I use the MatekH743 and BLHeli Holibro Tekko32, and the motor reverse was working on the prior version.
can you please upload a log showing an attempt to run the motor in reverse with 4.1.x, and a log of it working with 4.0.x
Done  !
!
4.0.9 Working:
https://drive.google.com/file/d/1FGzvbaRVYroGDw8zjhqNOXxhrmcp3Iav/view?usp=sharing
4.1.1 NOT Working:
https://drive.google.com/file/d/1S5OET-6tPObHhsCJa40JQsYGRNMaDwnv/view?usp=sharing
When reversing is commanded the motor stops in 4.1.1 while in 4.0.9 it reverses! We can see the current drops to 0 in 4.1.1 while it 4.0.9 doesnt stop running.
You need to set the following:
- SERVO_BLH_3DMASK=1
- SERVO_DSHOT_ESC=1
then reboot. That should get it working for you
Hello, @tridge ,
I just test firmware 4.1.2 beta1,The autotune did not go to high value now,but I don’t think it get the good result of PID,because of the strong wind.
But I found the EKF3 initialized again at the taxi for take off,I abandon take off immediately,Hope you to check my replay log.
And does the strong wind affect the PID at the new Autotune logic?
EKF3 initialized replay log
1 Like
Hi @tridge ,
Follow your instrutions and its working now! TBut I notice the engine now is rotating in the opposite direction (CCW) when reverse is not commanded, is it safe to reverse it in the servo output ch1? or shall I reverse the motor wires?
Thank you!
you should set SERVO_BLH_RVMASK=1 to make it reverse
1 Like