I had a look at your log, and it is indeed quite odd. I can’t immediately see the cause though.
The easiest way for me to find the issue is if you can get a “replay log” showing the issue. To do that you would need to use the following parameters:
LOG_REPLAY=1
LOG_DISARMED=1
LOG_FILE_BUFSIZE=46
this will create quite large logs as it will be logging all the time but if you can reproduce with those settings and get a replay log then we should be able to use the replay log to work out what is going on.
ahh, actually, I do see one possible cause of the issue. The parameter COMPASS_AUTODEC is set to 0, disabling the use of the WMM magnetic field tables. That also disables the constraints on the evolution of the EKF earth magfield vector, which makes the EKF compass code much more likely to diverge. Is there some reason why you set COMPASS_AUTODEC to zero?
You also have COMPASS_EXTERNAL=1 for an internal compass (the LSM303D). That is harmless as the AHRS and compass orientations are both zero, but should be changed.
I have just released plane 4.1.0beta7, which I hope will be the final beta of plane 4.1.0 before the stable release. If no significant issues are found I will release 4.1.0 final in one week.
Changes since beta6 are:
USB log download speeds improved on F765 and F777 based boards (USB buffers increased)
Serial port DMA contention heuristics improved (reduces chance of delays writing to serial devices)
Declination automatic lookup rounding fix (caused inaccurate declination in some parts of world)
DShot (bi-directional) support on Pixhawk4, CUAVv5, CUAVv5-Nano
@tridge,
Wow, great work Tridge. I will do the test for my 7kg Quadplane…However on the Mission planner setup, there is no beta version information. The only option is to install beta 4.1. So which beta version is this?? How to choose beta7 version ? I also have checked on the download web page of ardupilot.org, the only option is just beta version, dated August 29, 2021. I conclude this beta version is not beta7. So how to get the beta 7??
Please advice…Tks
hello @tridge
I had a small crash this morning with my TVBS and beta7.
My tvbs fly very well with plane 4.0.9.
With 4.1 and only from time to time I get large pitch oscillations and have no more control on pitch. The only way to escape is to switch to plane mode. This morning and yesterday I had 3 flights with beta 7 and had no problem. The same phenomena was already there with beta 2 and beta 3.
This is the log of the crash, it happened right after takeoff.
Flew my plane yesterday no problems, then updated to latest master today, now I have no throttle at all. Any ideas? What changed? I was running Beta6 previously.
Running Matek 765 and there doesn’t seem to be any Dshot changes to this board but clearly something has changed to cause an issue. Need to downgrade.
The Nano Goblin with Beta 6 works great after the tune, it flew amazingly well in 30Km/h winds.
I upgraded my S800 wing from 3.9.3 to Beta 6 and reset the tune parameters and it really surprised me how well it flew under the same wind with the defaults.
To the whole Ardupilot community thank you very much !!!
tridge,I found the RST parameter lost in parameter tree ,so i can’t reset flight mode,can you check it? And it can’t be set rally point in latest mission planner,i can’t find out where to set rally point in mission planner。
SIK Radio telemetry on SERIAL1 does not work any more.
Worked again after downgrading to beta6.
It is a Cube Orange board.
Similar problem as in Copter-4.1.0-rc1 released for beta testing
Completed the autotune on the S800 that used to be notoriously prone to have pitch oscillations after autotune in 3.9.x apparently tune ended and there were no oscillations. There was a wind of about 15/20 Km/h. But I am very happy with the result.
I do noticed that in Cruise the throttle behaves well but the Nano Goblin throttle in Cruise or Auto is just crazy, As reported here: Throttle Oscillation - in Auto Mode
i updated to beta7.
the situation is a little better, I also activated the Here2 external compass.
the actual direction is about 238 degrees.
log record on the link
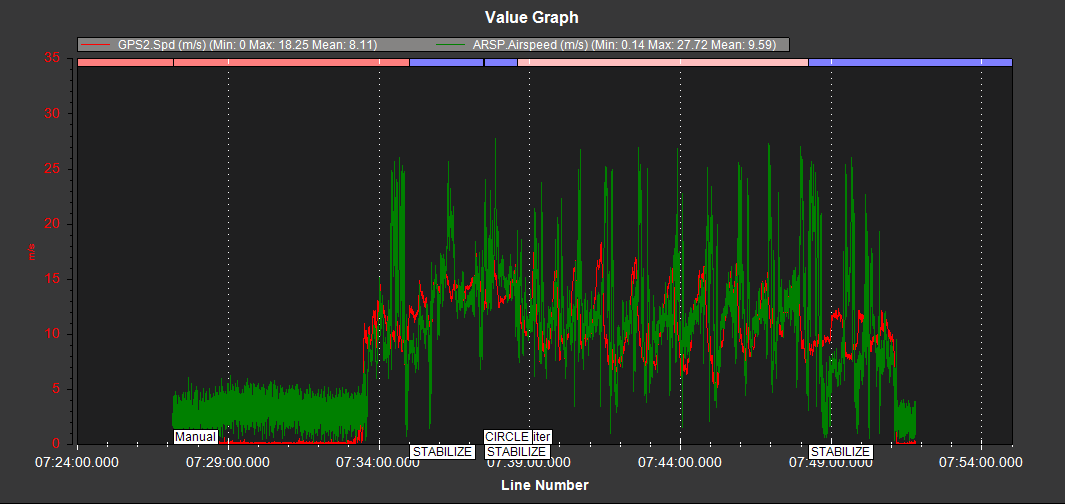
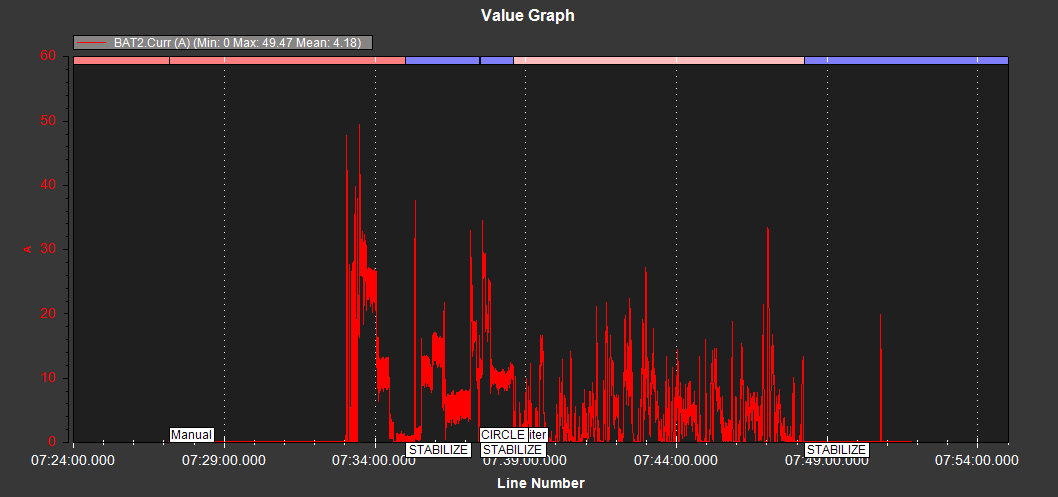
Hi tridge,I found there may be some issue about estimated airspeed in beta5,i did several flight today,and the estimated airspeed became wrong value when it display message of EKF3 ACTIVE。there have almost no wind,but the FC give a wind of 12m/s or 6m/s.you can see the pitcture below,the estimated airspeed is 21km/h,but the plane does not move.
it offten happen when the plane just take off and the plane become unstable ATT.
it happened many times after I update to firmware4.1 beta5,i record the issue this time so i post here,hope you can analysis it .
Please let me know if you can’t download my log
Plus:this plane was flight about 40 flight hours with firmware4.0.5,but i think the estimate airspeed is quite accurately,does is the EKF3 ISSUE?
thanks for the report! It is almost certainly related to the handling of no-compass flight where EKF3 initialises after takeoff.
I haven’t been able to reproduce this in SITL. Would you be able to get a replay log showing this issue?
To get a replay log set the following parameters:
LOG_DISARMED=1
LOG_REPLAY=1
LOG_FILE_BUFSIZE=200
You will end up with a larger log that will allow us to reproduce the problem using the replay tool and hopefully find the cause.
Thanks!