Hi. I am running 4.2.0 Dev version on a Matek F765WING. I have recently upgraded to this version from 4.1.something. I have a breakwire function that changes flight mode using one of the button inputs but it seems to have stopped functioning in the later firmware. I read somewhere that the BRD_PWM_COUNT parameter has been eliminated and the functionality defined through other means in the firmware. I suspect the pullup resistors on these outputs are not being enabled. In my case it is for button2.
The button press is monitored by a LUA script to change the flight mode when the input goes high. This was working on the earlier version of the firmware. I have measured the voltage on the relevant pin and it is zero.
Anyone have anything similar or knowledge of what might be wrong here please?
If you can tell me a better place to post for Plane 4.2.0 Dev please feel free to do so.
I will take a another flight and try to get a replay log tomorrow.Then can I change it back to use EKF2 by setting the following parameters:
AHRS_EKF_USE=1
AHRS_EKF_TYPE=2
EK2_ENABLE=1
As an aside, I had an odd bug on beta5 today; the aircraft entered RTL and then QRTL immediately after auto takeoff. The same mission/parameters were flown several times before the problem flight and once after it, all today. The logged reason is 39, which (from what I can tell from ModeReason.h) is RTL_COMPLETE_SWITCHING_TO_VTOL_LAND_RTL. I’m not sure how to see the current waypoint in the binary logs, but this was a cold boot, so the mission should have proceeded normally.
@tridge thanks very much. I have not done that yet and will give it a go later in the day. I must have missed that in my reading of the documentation.
{EDIT} That did indeed cure the problem. Thanks! I also found I wasn’t as delinquent as I thought since I couldn’t find any mention of having to do that in the docs for Ardupilot. Works now
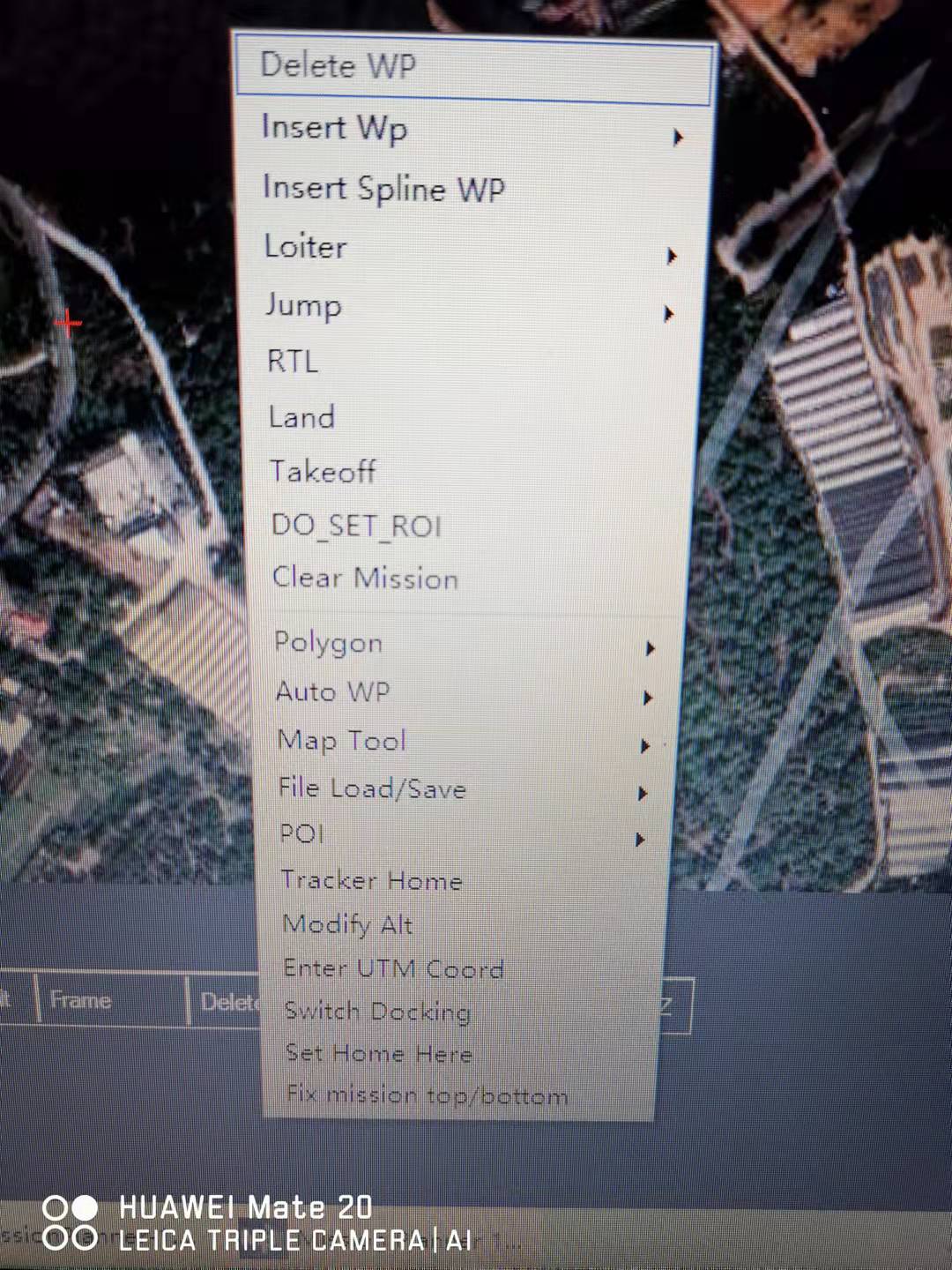
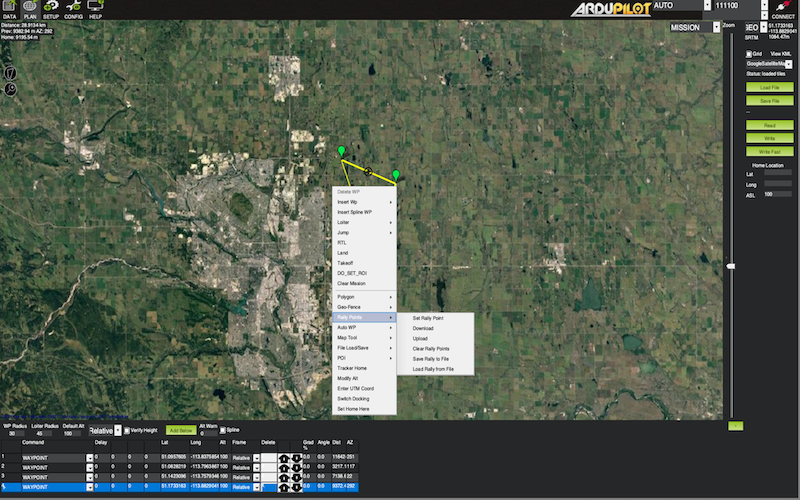
Please also check that firmware 4.1 support rally point ,because I can’t find out where to set a rally point in mission planner,I have try several version of mission planner.I can find out where to set rally point in mission planner before connect to FC,but it disappear after connect to FC.
@tridge, I still have one issue with beta. Yaapu telemetry is incorrectly reporting flight modes on the RadioMaster. E.g: FBWA is displaying RAttitude. AutoTakeoff is displaying Loiter.
Also when I turn off my transmitter the mode does not change to RTL. This is a red flag!
I am using Crossfire Nanao Rx and fully feature Crossfire module.
FC = F765-Wing.
From the picture you posted,it seems it doesn’t connect to FC now。yes i also can see rally point setting by right click mouse before connect to Fc,but I can’t see the rally point setting when it’s connect to FC.
I ALSO use latest beta firmware.