I’m delighted to announce the release of the ArduPilot Plane 4.1.0beta1 release. This is a major release, with a lot of changes across almost all
subsystems. Key changes include:
major updates to quadplane control algorithms, including new
landing approach system, new input shaping system for all levels of
VTOL control and new filtering options. See New QuadPlane features for 4.1 for a demo video
new PID system for fixed wing control, with much more flexible
filtering and true rate D term support. See New fixed wing PID system and autotune for details
new fixed wing autotune system which on most aircraft produces a
much better tune than the previous autotune.
There have also been a lot of changes at the low level system level as
well.
new DShot system, with much better timing and new features.
improved support for GPS moving baseline yaw
new unified ESC telemetry system for CAN, DShot and serial ESC
telemetry, allowing for ESC RPM driven notch filters on more ESC
types
EKF3 is now the default estimator, with EKF2 also available on
systems with 2MByte of flash.
external AHRS support, allowing for a serial connected AHRS system
(VectorNav-300 only at the moment)
sensor affinity in EKF3, allowing for more robust handling of
sensor failure, especially for airspeed sensors
rate PID slew limiting to to detect and suppress oscillations
temperature calibration for IMUs, including factory calibration
support
much improved notch filtering support, including double-notch and
realtime FFT based notch filtering
lots of lua scripting improvements, with greatly expanded API
much faster parameter download and mission upload/down using MAVFTP
Many thanks to everyone who contributed to this release. It is our biggest release yet and has benefited from fantastic feedback from our user community and partners.
Does the latest firmware support the RTK base station on a moving ship, and the aircraft will automatically take off and land on a dynamic ship? @tridge
can you send a log file of it working with 4.0.x and then a 2nd log file with it not working with 4.1.0beta1? The ESC telemetry support has been changed a lot for 4.1 and we thought we covered all the use cases but perhaps we’ve missed one.
Also, what board type are you using?
not in this release, no. We have implemented this for one user and we do plan on including it in a future update, but I decided it was a bit too complex change to include in the first 4.1.0 release (it would have delayed the release too long).
One of the main difficulties with ship landing is having users able to test it. If I gave you test code for this feature would you be able to test it?
is there a more comprehensive list of changes since 4.0 beyond the list above? specifically, I’d like to know if there are changes for auto takeoff and auto landing of conventional planes (not quadplanes).
does takeoff now hold a straight course while climbing if there is a strong crosswind?
Yes, I am very willing to test this function. I have a multi-rotor and VTOL platform and a vehicle that can be used as a mobile platform, which is very suitable for testing this function.
I can upload test results and update the latest test situation.
oh, so you only expect one ESC in the log?
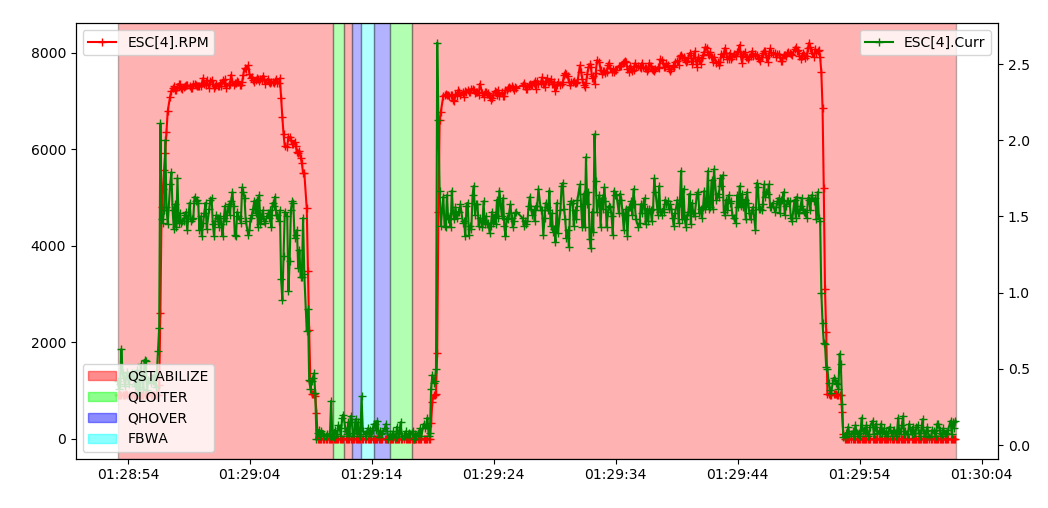
if that is the case then it’s actually working. The log msgs have changed, as it’s now ESC[4] instead of ESC1, but same data
but now with 4.1 (whit one ESC) I can’t see the data under HUD
I will check it again this afternoon, I will select esc4_rpm / esc4_curr instead of esc1_rpm / esc1_curr on Display This

 , it’s ready
, it’s ready