@ton999
Thanks for the feedback!
I tested this version, and I also try to test Plane V4.1-Beta7.
Unfortunately, I could still see the altitude errors on Plane V4.1-Beta7 as shown in the figure below.
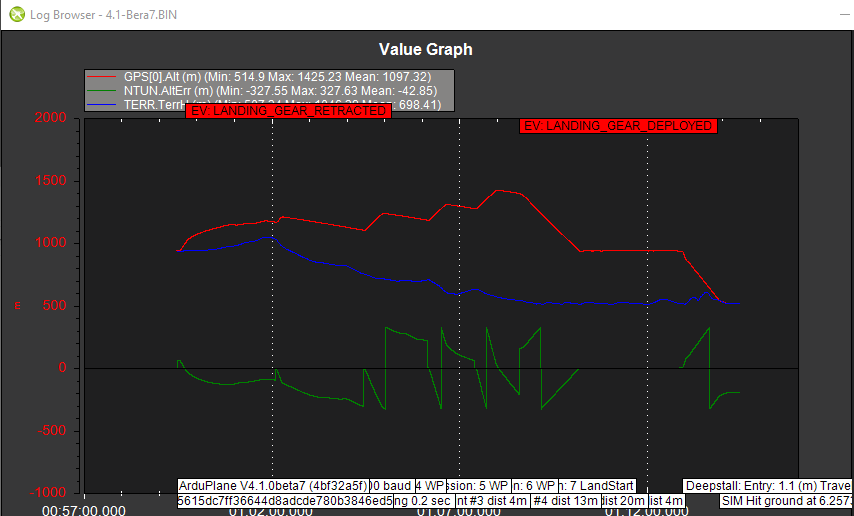
For your information, I have added a log file obtained from Plane V4.1-Beta7 to this link.