The CRSF implementation of flight mode is simply AP_Notify::get_flight_mode_str() so that would have to be wrong for this to be broken. Maybe @yaapu does something different for passthrough?
For the failsafe I get an RC fail if I turn off my transmitter, are you saying that there is no detection of a lost transmitter at all?
@RizHass@tridge my widget also supports PX4 flightmodes when configured to do so, I’m pretty sure you have the “Enable PX4 flightmodes” option turned on in the config menu, PX4 is not ArduPilot
This is reinforced by the fact that FBWA is plane mode 5 which in the PX4 mapping I use is RAttitude, so no issues here on the ArduPilot side!
I just loaded Plane 4.1 beta on a Durandal with a CRSF Nano RX connected - turned off the receiver and immediately got a failsafe, Make sure your TX is on before you power on the flight controller and RX and maybe try upgrading the TBS firmware.
Direct Memory Access. The data is passed directly between the serial port and memory without having the processor need to do the work. That frees up the processor for other more important tasks and speeds the data transfer. DMA becomes more important as the amount of data to be moved increases, or high processor loading limits the amount of time it would have available for the task.
Ports without DMA require the processor to read each byte from the port, then write it to memory, or vice versa.
Quick question if the plane completes autotune successfully on a windy day and on a different day the wind conditions are better, if I repeat the process will it start over or will fine tune the previous tune?
Thank you.
@andyp1per, I have searched Matek F765 manual and did not find any port (UART) designated as DMA. As mentioned before, I am using Rx6/Tx6 with serial 7 and it is working but I do see on the Yappu screen during initialization warning that UART is not a DMA.
I switch to Rx1/Tx1 (UART1) and changed parameters on Serial2 _Protocol = 23. Disabled BRD_ALT_Config = 0 so Serial 7 is completely removed. Doing all this, I have no telemetry and RC control.
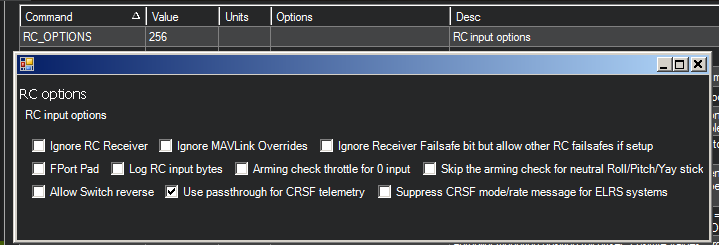
Serial2_option is set to 0. and RC_option is 258.
@andyp1per For example, where is it documented on the Matek F765-Wing which UART has DMA access? The ArduPilot wiki explicitly states that UART6 / SERIAL7 supports all RC protocols. So also CRSF. If you think it should be better SERIAL2, then that MUST be clearly documented and not bog down in some discussion. I myself also use SERIAL7, have the DMA message, but otherwise no problems with the RC connection.