@tridge thanks very much. I have not done that yet and will give it a go later in the day. I must have missed that in my reading of the documentation.
{EDIT} That did indeed cure the problem. Thanks! I also found I wasn’t as delinquent as I thought since I couldn’t find any mention of having to do that in the docs for Ardupilot. Works now
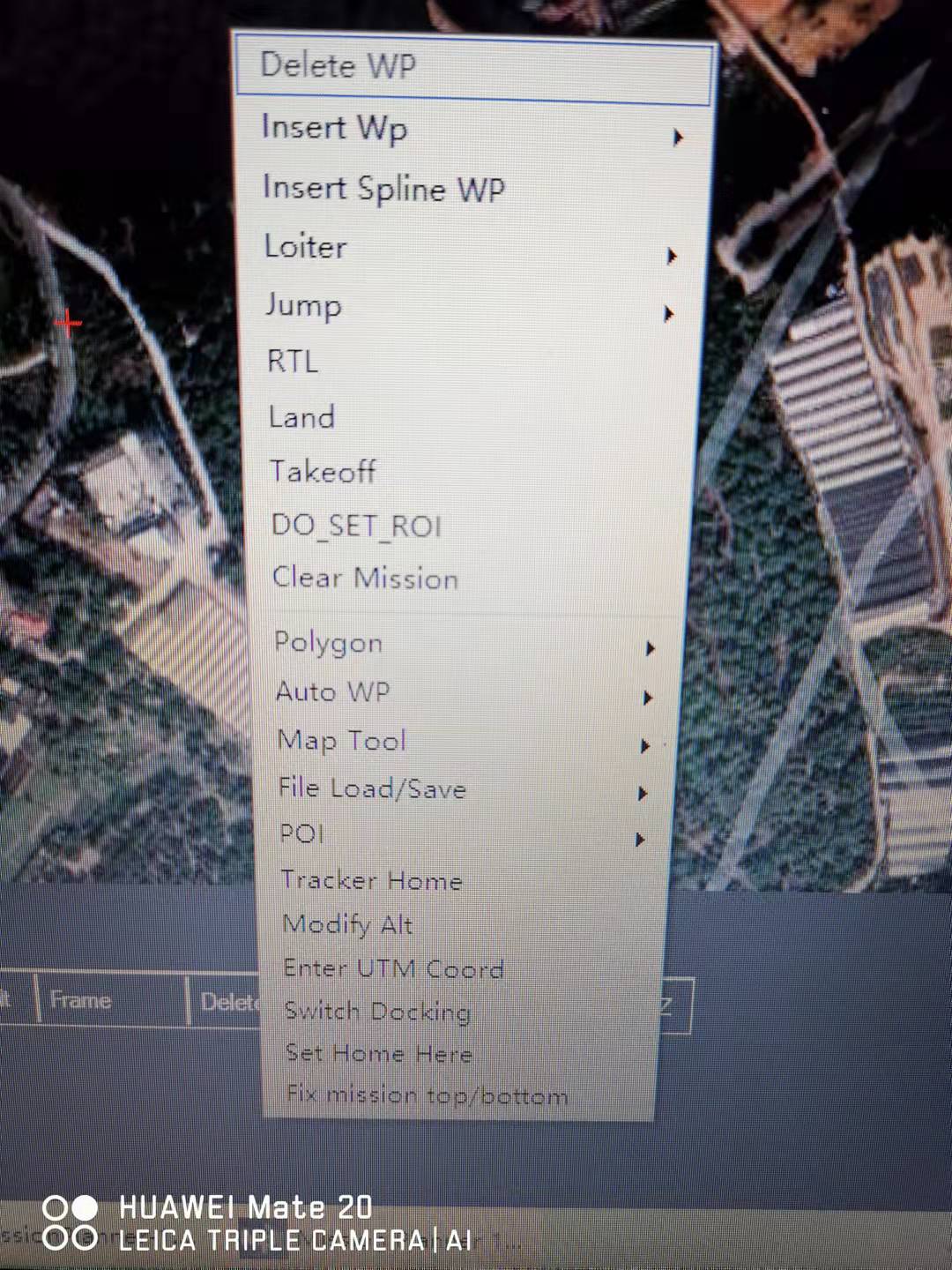
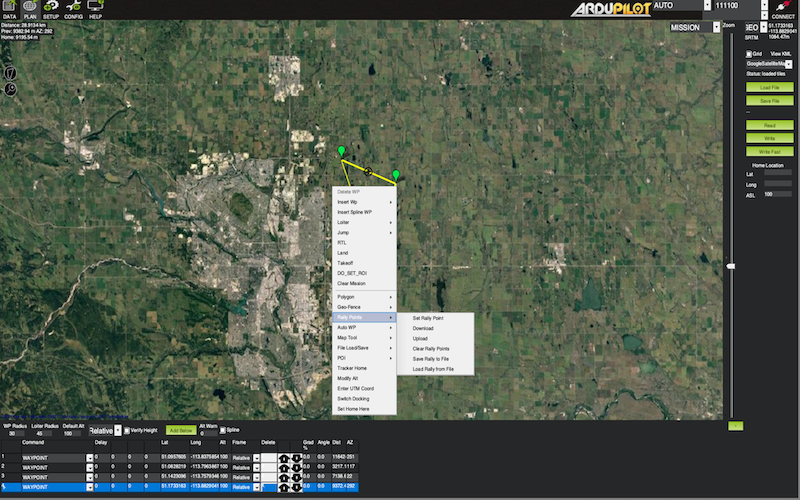
Please also check that firmware 4.1 support rally point ,because I can’t find out where to set a rally point in mission planner,I have try several version of mission planner.I can find out where to set rally point in mission planner before connect to FC,but it disappear after connect to FC.
@tridge, I still have one issue with beta. Yaapu telemetry is incorrectly reporting flight modes on the RadioMaster. E.g: FBWA is displaying RAttitude. AutoTakeoff is displaying Loiter.
Also when I turn off my transmitter the mode does not change to RTL. This is a red flag!
I am using Crossfire Nanao Rx and fully feature Crossfire module.
FC = F765-Wing.
From the picture you posted,it seems it doesn’t connect to FC now。yes i also can see rally point setting by right click mouse before connect to Fc,but I can’t see the rally point setting when it’s connect to FC.
I ALSO use latest beta firmware.
The CRSF implementation of flight mode is simply AP_Notify::get_flight_mode_str() so that would have to be wrong for this to be broken. Maybe @yaapu does something different for passthrough?
For the failsafe I get an RC fail if I turn off my transmitter, are you saying that there is no detection of a lost transmitter at all?
@RizHass@tridge my widget also supports PX4 flightmodes when configured to do so, I’m pretty sure you have the “Enable PX4 flightmodes” option turned on in the config menu, PX4 is not ArduPilot
This is reinforced by the fact that FBWA is plane mode 5 which in the PX4 mapping I use is RAttitude, so no issues here on the ArduPilot side!