I remembered another change I made to the parameters when I upgraded. A few days before this successful flight I did another autotune and afterwards found that the controls were really sensitive. So following this thread Quadplane Hover Tests Done, Tuning Advice Needed Please and when I moved to 4.0 beta I lowered Q_A_ACCEL_P_MAX and Q_A_ACCEL_R_MAX a little which seemed to help earlier when I ran into the same problem. I’m not sure if changing this contributed to my problem that caused the crash or not.
Edit - I just realized that also yes both have 300 for SCHED_LOOP_RATE. Not sure whey I thought it was 50. Hopefully something in the logs from today will stick out to point me in the right direction. I do plan to rebuild…
Four missions using Plane 4.0 beta 2. Maiden for a new Bixler 2 with HolyBro Durandal. The aircraft flew well in manual and didn’t miss a beat in autotuned, FBWA and auto. It gave such confidence that I used it in FBWA for ab initio pilot training today on only it’s third mission.
Brilliant work as ever @Tridge and the Dev team! If the logs are of any use they are here: Plane 4.0 beta 2 logs
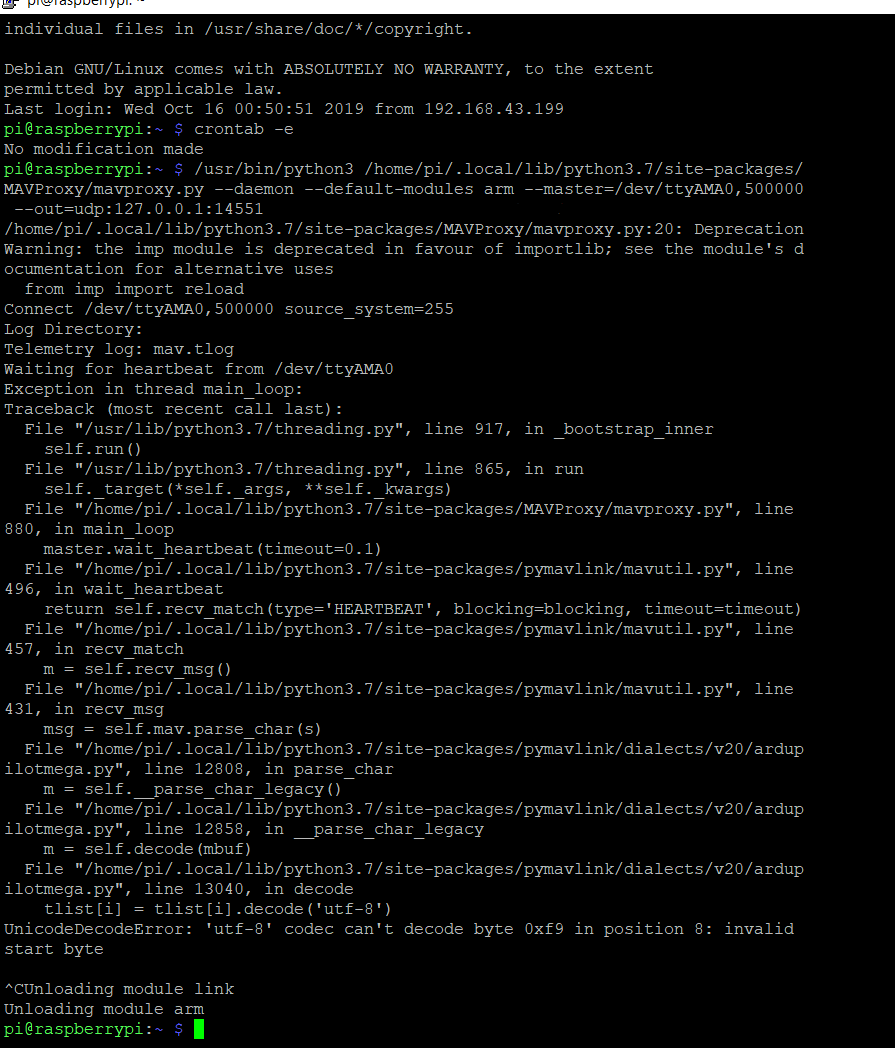
@tridge Loading Plane 4.0 appears to break out mavproxy connection. Is this a known issue? Not sure where to start with debugging this, as returning to 3.9.11 repairs the problem. Attached screenshot of the error thrown by Mavproxy
Tridge, is the In Flight Compass offset learning in the current version of Mission Planner. This feature is very useful to me as I fly in an area that has some compass interference around. How do I activate the feature? JEFF
So with TAKEOFF mode does it follow all the parameters for Auto takeoff and then run to the TKOFF_ALT and TKOFF_DIST and Loiter? IOW the same functionality as an Auto Mission Takeoff and then Loiter Unlimited?
Henry found a bug in the new TAKEOFF mode. It will takeoff to the TOFF_LVL_ALT and loiter there, rather than TOFF_ALT. I’ve fixed it in master and the 4.0 branch ready for next beta.
Is it possible to add other Q flight mode options for RCn_OPTION? Right now option 4 gives us RTL and this works great for Quadplane if the Q_RTL option is set but having QLand would also be great.
Another quick question - I am currently building a QuadPlane Tilt rotor that tilt the front 2 motors. In a Tilt setup does this free up the Servo 3 for throttle to be reassigned for other purposes?
I am trying to get passthrough telemetry (10) on my radio using the Frsky X8R receiver which has a smartport which provides an inverted signal.
In the past it was necessary to hack inside receivers or use a converter cable to provide a non-inverted signal.
I would like to know if the new SERIALn_OPTIONS parameter can perform this capability. I have tried it without success so far on Matek F405-Wing.
Some F4 boards have external inverters; the PixRacer has one for UART8, but the MatekF405 has none. But the F7 processor has built-in support for inversion of all uarts.
I have a converter cable in another Pixhawk based model, but seeing as I do need another receiver for the F405-Wing, I will get one which provides a non-inverted Smartport signal, such as R-XSR which has a solder pad just for that.
Tx for clarifying.
@tridge Two Bixler 2 missions using Beta 4. One in Auto that ended prematurely; I believe due to an airframe serviceability issue rather than the autopilot. Second mission is just in FBWA including some experimentation with full flap for landing. Gusty with 11-13kts wind.
I wonder if Preflight_calibration could be added as one of the RCx_option ?
I use this function after a couple of minutes from power up to calibrate baro/airspeed after the sensors had a chance to warm up.
It would be nice to be able to do this from the remote and not have to power up laptop/mission planner for a quick test flight.