Agree with Jagger…I have a Taranis and X9D. Works like a charm.
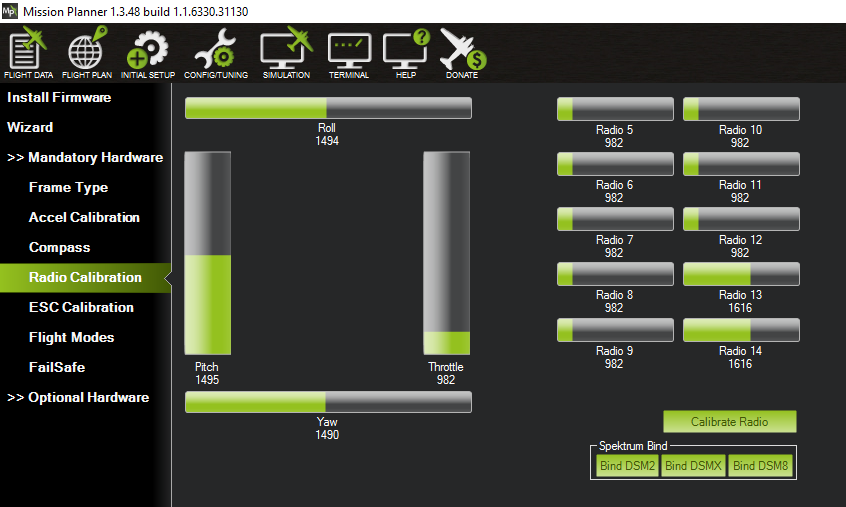
It really is good. I have 14ch’s working in Mission Planner.
But I’m afraid I may have left out a Failsafe or Pre-arm check
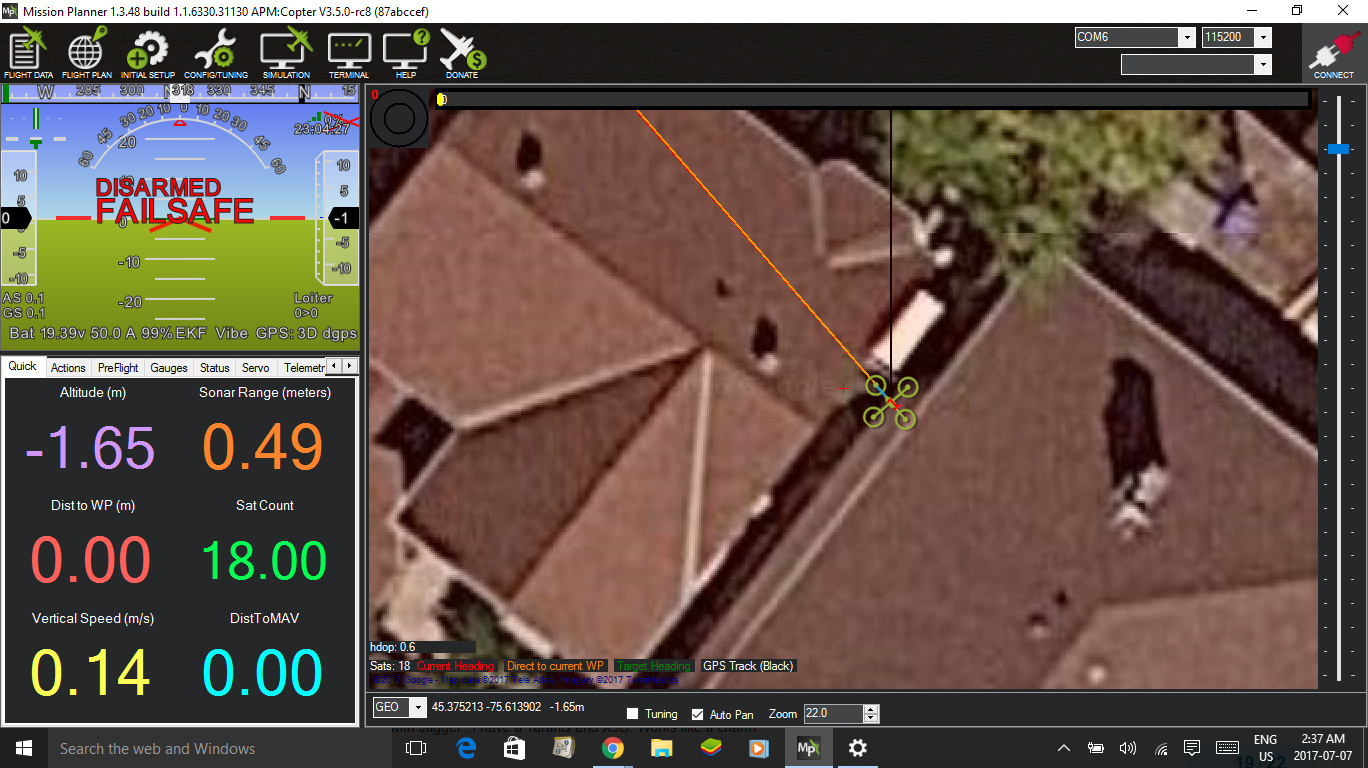
What is the failsafe message MP is showing? Usually it provides a reason: compass calibration, safety switch, etc.
That’s where I got confused. every now and then I get a no receiver warning, but it works in radio calibration.
At the right hand end of that little bar under the HUD is a tab called MESSAGES.Have a look in there and it will have a list of all mavlink messages in that boot session.It should specify a failsafe.
Sorry for the delay, I got caught in a pile of work.
Now I have one more problem in the prearm check. No RC…
But I can calibrate the transmitter.
I’m using Taranis X9D with E9R extended range receiver.
Here is a screenshot of the transmitter calibration. There seem to be extra channels.
The other problem I’m having is that the Pixhawk has no power except when connected via USB. As soon as I remove USB (with battery power), the GPS and Pixhawk turn off.
Here is what was in my message log:
PreArm: Check FS_THR_VALUE
PreArm: Compass not calibrated
PreArm: Compass not calibrated
PreArm: Check FS_THR_VALUE
PreArm: Compass not calibrated
PreArm: Compass not calibrated
PreArm: Check FS_THR_VALUE
PreArm: Compass not calibrated
PreArm: Compass not calibrated
PreArm: Check FS_THR_VALUE
PreArm: Compass not calibrated
PreArm: Compass not calibrated
PreArm: Check FS_THR_VALUE
PreArm: Compass not calibrated
PreArm: Compass not calibrated
PreArm: Check FS_THR_VALUE
PreArm: Compass not calibrated
PreArm: Compass not calibrated
PreArm: Check FS_THR_VALUE
PreArm: Compass not calibrated
PreArm: Compass not calibrated
PreArm: Check FS_THR_VALUE
PreArm: Compass not calibrated
PreArm: Compass not calibrated
PreArm: Check FS_THR_VALUE
PreArm: Compass not calibrated
PreArm: Compass not calibrated
PreArm: Check FS_THR_VALUE
PreArm: Compass not calibrated
PreArm: Compass not calibrated
PreArm: Check FS_THR_VALUE
PreArm: Compass not calibrated
PreArm: Compass not calibrated
PreArm: Check FS_THR_VALUE
PreArm: Compass not calibrated
PreArm: Compass not calibrated
PreArm: Check FS_THR_VALUE
PreArm: Compass not calibrated
PreArm: Compass not calibrated
PreArm: Check FS_THR_VALUE
PreArm: Compass not calibrated
PreArm: Compass not calibrated
PreArm: Check FS_THR_VALUE
PreArm: Compass not calibrated
PreArm: Compass not calibrated
PreArm: Check FS_THR_VALUE
PreArm: Compass not calibrated
PreArm: Compass not calibrated
PreArm: Check FS_THR_VALUE
PreArm: Compass not calibrated
PreArm: Compass not calibrated
PreArm: Check FS_THR_VALUE
PreArm: Compass not calibrated
PreArm: Compass not calibrated
PreArm: Check FS_THR_VALUE
PreArm: Compass not calibrated
PreArm: Compass not calibrated
PreArm: Check FS_THR_VALUE
PreArm: Compass not calibrated
PreArm: Compass not calibrated
PreArm: Check FS_THR_VALUE
PreArm: Compass not calibrated
PreArm: Compass not calibrated
EKF2 IMU0 is using GPS
EKF2 IMU1 is using GPS
EKF2 IMU0 Origin set to GPS
EKF2 IMU1 Origin set to GPS
PreArm: Check FS_THR_VALUE
PreArm: fence requires position
PreArm: GPS speed error 1.0 (needs 1.0)
PreArm: Compass not calibrated
PreArm: Compass not calibrated
PreArm: Check FS_THR_VALUE
PreArm: fence requires position
PreArm: GPS speed error 1.6 (needs 1.0)
PreArm: Compass not calibrated
PreArm: Compass not calibrated
PreArm: Check FS_THR_VALUE
PreArm: fence requires position
PreArm: GPS speed error 1.5 (needs 1.0)
PreArm: Compass not calibrated
PreArm: Compass not calibrated
PreArm: Check FS_THR_VALUE
PreArm: fence requires position
PreArm: GPS speed error 1.6 (needs 1.0)
PreArm: Compass not calibrated
PreArm: Compass not calibrated
PreArm: Check FS_THR_VALUE
PreArm: fence requires position
PreArm: GPS speed error 1.5 (needs 1.0)
PreArm: Compass not calibrated
PreArm: Compass not calibrated
PreArm: Check FS_THR_VALUE
PreArm: fence requires position
PreArm: GPS speed error 1.5 (needs 1.0)
PreArm: Compass not calibrated
PreArm: Compass not calibrated
PreArm: Check FS_THR_VALUE
PreArm: fence requires position
PreArm: GPS numsats 5 (needs 6)
PreArm: Compass not calibrated
PreArm: Compass not calibrated
u-blox 2 HW: 00080000 SW: EXT CORE 3.01 (107900)
u-blox 1 HW: 00080000 SW: EXT CORE 3.01 (107900)
PreArm: Check FS_THR_VALUE
PreArm: fence requires position
PreArm: Fence enabled, need 3D Fix
PreArm: Compass not calibrated
PreArm: Compass not calibrated
GPS 2: detected as u-blox at 115200 baud
GPS 1: detected as u-blox at 115200 baud
EKF2 IMU0 tilt alignment complete
EKF2 IMU1 tilt alignment complete
EKF2 IMU0 initial yaw alignment complete
EKF2 IMU1 initial yaw alignment complete
PX4v2 00360035 30365109 31353833
Frame: QUAD
APM:Copter V3.5.0-rc8 (87abccef)
PX4: 33825946 NuttX: 1a99ba58
Initialising APM
Barometer calibration complete
First off how are you powering the Pixhawk ? The 21 has two dedicated ports for power.
Throttle failsafe - set the value to around 965.
I’d flash 3.5.0 stable on it as well.
I do have v3.5.0
I will try what you suggested.
Those messages were while armcheck was set to 0.
i did do a successful compass calibration, and all 16 steps of the wizzard.
Here is when it is set to 1:
PreArm: Throttle below Failsafe
PreArm: Check FS_THR_VALUE
PreArm: Compass not calibrated
PreArm: Compass not calibrated
PreArm: Throttle below Failsafe
PreArm: Check FS_THR_VALUE
PreArm: Compass not calibrated
PreArm: Compass not calibrated
PreArm: Throttle below Failsafe
PreArm: Check FS_THR_VALUE
PreArm: Compass not calibrated
PreArm: Compass not calibrated
PreArm: Throttle below Failsafe
PreArm: Check FS_THR_VALUE
PreArm: Compass not calibrated
PreArm: Compass not calibrated
EKF2 IMU0 is using GPS
EKF2 IMU1 is using GPS
u-blox 1 HW: 00080000 SW: EXT CORE 3.01 (107900)
u-blox 2 HW: 00080000 SW: EXT CORE 3.01 (107900)
EKF2 IMU1 Origin set to GPS
EKF2 IMU0 Origin set to GPS
GPS 1: detected as u-blox at 115200 baud
PreArm: Throttle below Failsafe
PreArm: Check FS_THR_VALUE
PreArm: Compass not calibrated
PreArm: Compass not calibrated
GPS 2: detected as u-blox at 115200 baud
EKF2 IMU1 tilt alignment complete
EKF2 IMU0 tilt alignment complete
EKF2 IMU1 initial yaw alignment complete
EKF2 IMU0 initial yaw alignment complete
Initialising APM
Barometer calibration complete
PX4v2 00360035 30365109 31353833
Frame: QUAD
PX4: 33825946 NuttX: 1a99ba58
APM:Copter V3.5.0-rc8 (87abccef)
You’ve got AC 3.5.RC 8 loaded on there and there’s a stable release out now.
I’m not sure those messages are anything to worry about.It looks like a boot sequence sort of thing to me although I haven’t looked at my messages for a while now.I know there was a lot of chatter about compass calibrations a while back but it looks like it boots ok.
A log may help a bit.
There’s also a much newer Mission Planner around and I’ve heard it mentioned you should be at the bleeding edge using a Pixhawk 2.1.
Ok, I’ve updated everything.
I’m still getting a “NO RC RECEIVER” warning, but it seems to work when I set “Arm_Check” =0
I need to figure out how to assign channels between the Pixhawk and Radio for my gimbal and other flight modes like RTL or Land.
With the new firmware and software I think I might run the Wizard again. See if that eliminates problems in the ARM_CHECK.
You’ll get a no receiver message if the Taranis is switched off. Switch it on and you should also get a sound notification that it found it (if you’ve a buzzer fitted ).If the RX green LED is on it should be recognised by the FC.
It’s acting very strange. I have the motors running, but when the throttle is back to the lowest, the motors speed up significantly. I have the “no RC receiver” warning but can calibrate the radio, so it is connected.
Also, I can only arm the motors when the Pixhawk 2.1 is connected via USB.
I might do a youtube video to show what is going on, or not going on…
But the Taranis is on before I apply power to the Pixhawk, and the green light is present on the L9R receiver.
Don’t use the wizard with PH2.1, and make sure you have fmu-v3 firmware loaded.
Thank you for the reply. where can I find FMU-v3, and how do I install?
I have APM 3.5.2 quad installed. But this must be different…
There might be an easier way through MissionPlanner (bit rusty with MP), but one way is to download -v3 from here: http://firmware.ap.ardupilot.org/Copter/stable/PX4/ then in missionplanner initial setup page click “load custom firmware” (or something similar to that), and follow the prompts. It should flash. The v3 firmware includes a bunch of defaults better suited to the Cube, such as imu heating and allowing more flash usage.
I feel a bit noobish, How do you download those files? I just get to another page with the code, and no option to download.
Also, v4 is there. is that better than v3?
I copied the code and pasted the code into a .txt file, then renamed the extension to .px4
I’ll wait to make sure I don’t brick my cube
No worries! Every browser is a little different.
Right click, then save target as.
Regards,
James
I get the same problem with chrome and microsoft
If you right click (not left click) this link:
http://firmware.ardupilot.org/Copter/stable/PX4/ArduCopter-v3.px4
Then select “save target as” it should download and save for you. If it doesn’t, send an email to pattison.james at gmail dot com and I’ll send the file to you.