Hi Experts good day to al! So I did test my drone today via AltHold and unfortunately i am unable to disarmed the quad after Landing. I can armed the quad then disarmed work if i didnt take off yet, but once i take off and land it wont disarmed anymore. Before it disarms then now it suddenly wont disarmed.
i face this problem sometimes when air humidity is too much
every time when you faced this problem simply switch to stabilize and then try to disarm motors
also check this post
Parameter PILOT_THR_BHV should be 4 or 6. If you have this set for anything else, it won’t disarm on landing detection, and will instead wait for the disarm timer.
Hi @hosein_gh, Yes i set PILOT_THR_BHV to 4 for Detection Landing Disarmed, but the problem is. It work onced and didnt happen again, on landing it didn’t disarmed.
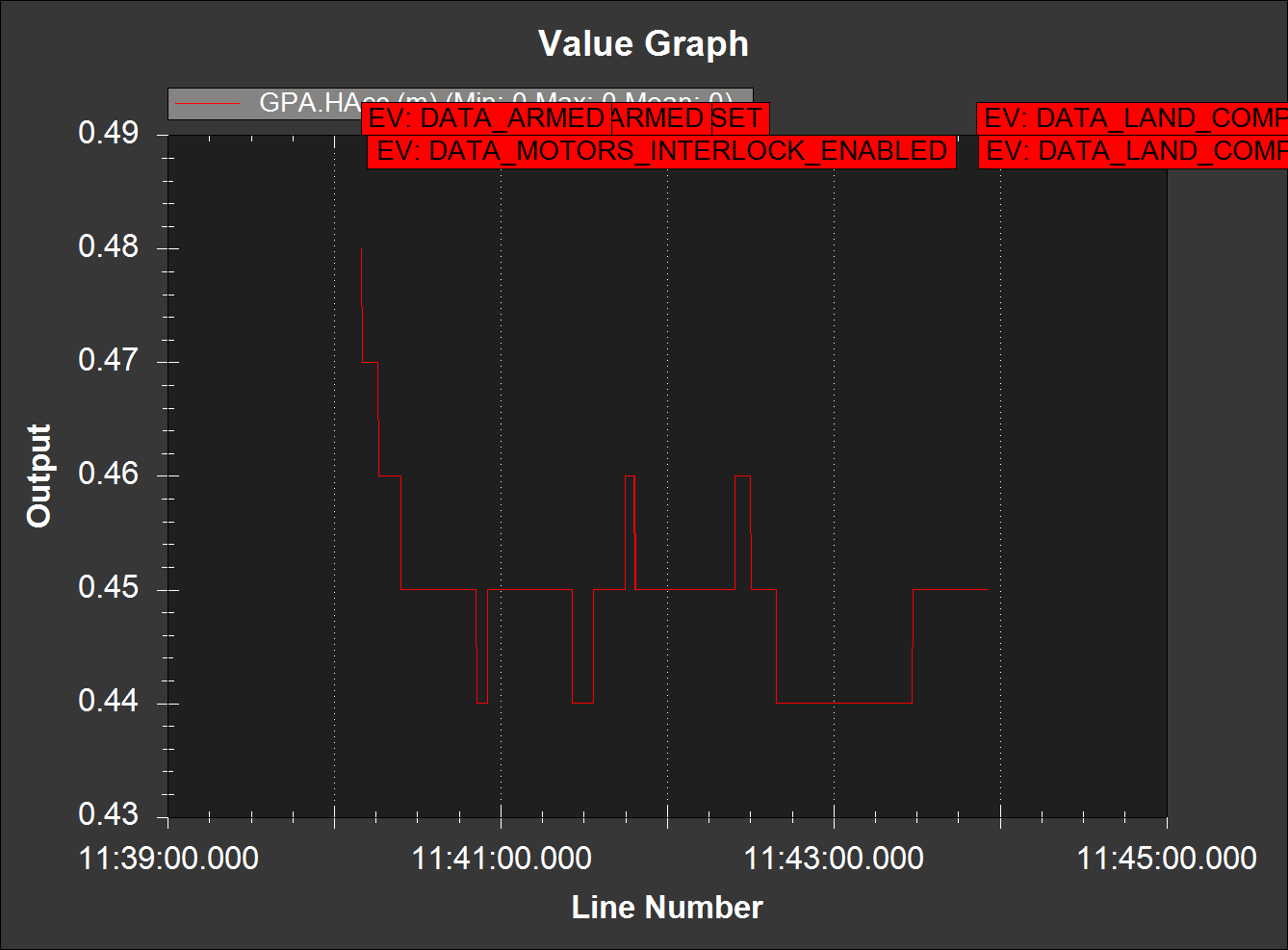
I also tried flying in Loiter mode even though the HDOP is more than 1 just to try, but this is what happens upon landing:
Yes it is Enabled Sir. The problem is in my Radio Transmitter I have only set to:
Loiter, AltHold and RTL only. Because I can only set 3 flight modes in my radio transmitter
Before I can disarmed using AltHold, but not I cannot. I dont know what gone wrong.
I always use Emergency landing on laptop or phone through QGrounControl, a bit hassle. huhu
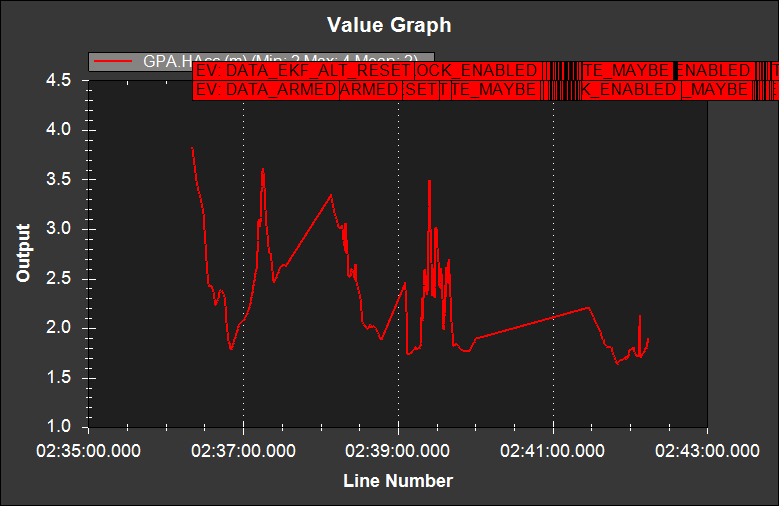
Take a look at what type of accuracy you can expect in the open (80% horizon view). The top is my gps the bottom is your last flight. Your flying site may not produce a valid test in any mode simply because most 5v electronics are not designed to work in very high RF environments.
Q. will the EFK settle when the gps data is moving around?
I ask because i always get a 3D fix before EFK shows green.
Would these test be easier to review if all flight systems were a go before flight?
The antenna above this flying site has ten of thousands of watts running through it.
Do you think it could be an issue?
I’m a certified rope-access telecom tech, with 8 years of climbing towers and fiddling around with antennas under my belt. I’ve actually started building and flying drones in an attempt to lessen the rope-climbing part of my job.
But, while telecom towers put out alot of background rf noise, and there are swaths of space around them where fine electronic circuits not properly shielded may encounter errors, the ground area below and around them is never subjected to anything that can affect a microcontroller, an IMU or the short bus between them. Much less cooking dinner - we always had to go scavenging for wood, build a firepit, etc…
Cornel,
This is not a telecom tower. Its a Global IT center and much more like a TV tower 2-300kw . Telecom transceivers are limited to 20- 750 watts. Do you see any cell antennas? Power is piped up these TV towers not wired. The large building with no windows at the tower base is probably a military grade backup and cooling system for the tower. Typical TV station stuff.
By viewing the logs we also can see the GPS is degraded by potential RF interference. This was corrected on the OP’s copter but GPS never had a good fix. Now the subject has moved on but I still contend that in a open area results will be much more predictable.