If you want Pixhawk to control LEDs, you need this
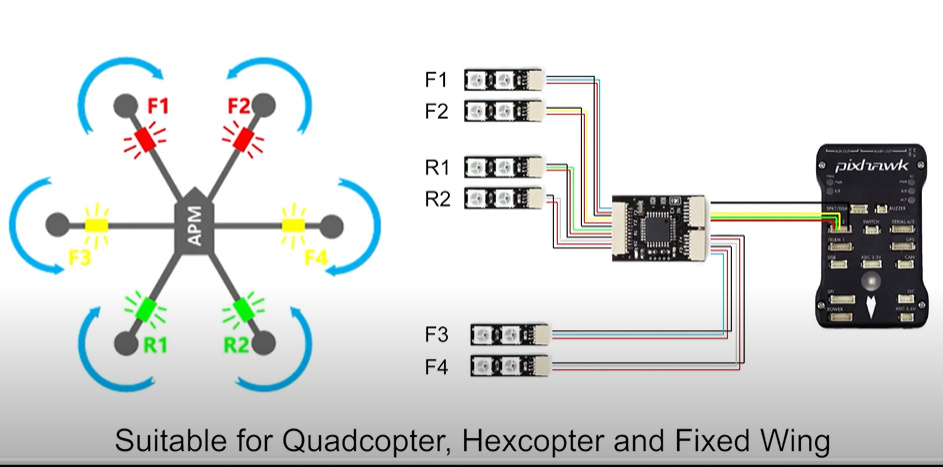
This is a very useful diagram, thank you.
By the looks of it the only major change I need to make to my current setup is powering the LEDs directly from the PDB rather than from the ESCs. Do you have any idea why having the LEDs connected to the ESCs would be causing the Pixhawk to fry? My instinct is that having the signal wires from the LED strips connected to the Pixhawk is causing my problems, as the Pixhawk fried shortly after connecting them the last time. I suspected current may be flowing the wrong way and so I should use a diode on each output, however do you think it is to do with how they are powered? I had disconnected the power wire from each ESC to the Pixhawk last time and the Pixhawk still fried.
This board looks interesting. Although I was hoping to set the LEDs up myself and use Lua scripting so that in the future I might make them do more creative things.
Classic loop back problem.
These ESC are designed by someone who was half drunk on Vodaka straight up 
Kidding, I don’t trust these ESC manufacturers. Brushless motors introduce noise and interference on +5V ESC output.
My rule of thumb never power anything of Pixhawk except maybe GpS.
Buy the board and save the headache and enjoy flying 
I am busy right now I will tell u where to get the replacement capacitor or resistor later.
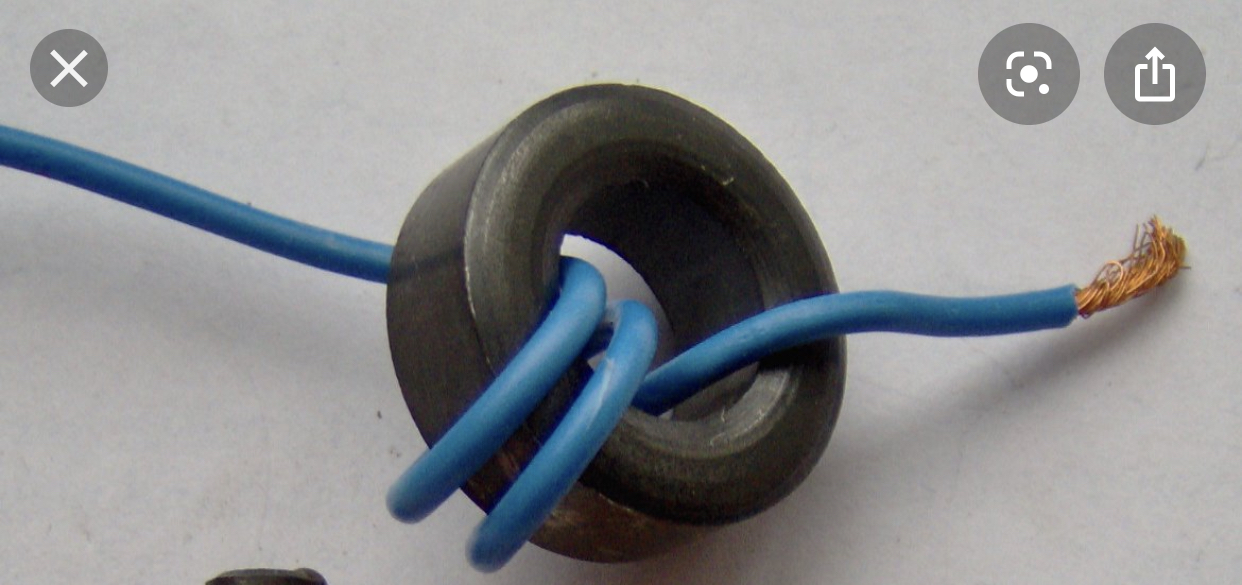
You can also add a small ferrite choke to Each ESC signal and ground wires. This will eliminate any interference coming back from brushless motors inside pixhawk. Both wires not just one.
We typically do this on large expensive quads that can handle additional weight.
Good read…
Keep fixing the power issues, however I predict those big flat arms will give your flight controller lots of vibrations.
As each prop blade passes over the arm, the resulting prop wash, or downwards rush of air, will be like a little bat hitting the arm. It can be fixed by arms with a more open lattice-work type of construction, or round arms. Both have different issues to deal with. The alternative is space you motors up higher away from the arms more.
You can tackle that problem once the voltage issues are sorted out.
So I’ve manaegd to wire the LED strips to get power directly from the PDB. Have done a test and Pixhawk boots fine, however the front two strips that should be lighting to resemble the status LED of the Pixhawk seem to be giving random colours. I assumed this meant that the signal needed to be grounded but that hasn’t worked unfortunately. At least nothing has popped as of yet.
Haha yeah for my first quad it was definitely a bad idea to try to custom 3D print a frame! Although it has done very well when I had the quad running the first time.
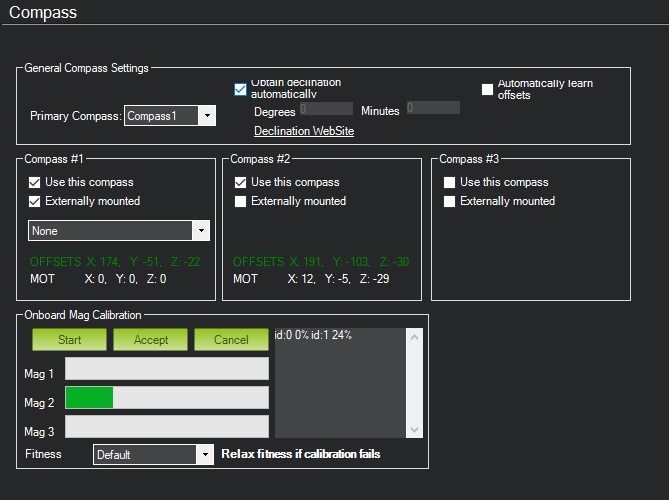
Interestingly my new GPS module arrived today and I connected it to my Pixhawk and it recognises the compass (shows up on HW ID as below). However I am unable to calibrate the compass (stays at 0% for mag1 whereas mag2 (onboard compass) goes up). The module is also getting very hot (not sure if this is normal). I have checked the voltage to the GPS and it is at just below 5V.
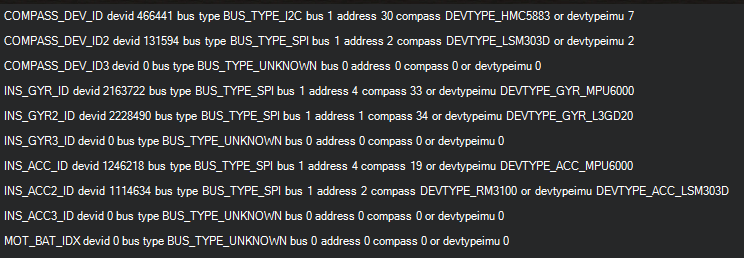
A faulty GPS / compass or is my Pixhawk more broken than I thought?
I disabled using the external compass and attempted a test flight. It was very unstable and kept drifting. No visible oscillations, just very twitchy and this got far worse when I attempted to switch to Alt-hold / loiter. Managed to land it on each test but I am not confident that the sensors it is using to stabalise are functioning correctly.
Here are the log files for that flight: log_24_2020-5-2-17-23-02.bin (508 KB) log_23_2020-5-2-17-19-40.bin (940 KB)
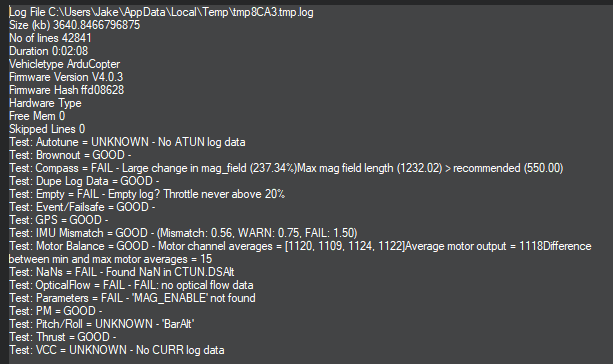
Log analysis of a larger test flight file gives this:
If you are simply powering the LEDs from the PDP, well it’s up to the LED settings. Nothing to do with FC.
What GPS you bought? Post a pic.
in my opinion once you fried the FC, it will never be stable. Only good for some bench testing even if you restore it.
You can’t just randomly select a capacitor from another board, they may all look the same but have different values and can effect the operation of the overall system even appears to be working. Furthermore, we don’t know what other electronics got partially damaged.
I choose a capacitor with the same label as the one that blew, hence it should have the same capacitance. I have noticed that the the altitude reading is a lot less stable than before. I can only assume that, as you say, other components have been damaged. I am very reluctant to buy another Pixhawk board when I am not certain the problem that is frying my Pixhawk is even fixed, as it is becoming quite expensive. I understand that this is ultimately the only option. And I would like to think that after completely rewiring my ESCs / LEDs that enough must have changed in the drone that the problem is fixed.
This is the GPS I bought.

not sure what to propose u at this time other than another FC. You can buy a cheaper FC if you dont need all the bells whistles of pixhawk but then the whole wiring will change.
I will check ur bins later
Due diligence upfront and bench testing this hobby is all about…
Yeah I understand that the reward of fixing all these problems and everything coming together is worth it in the end! I do enjoy this sort of problem solving but it can be incredibly frustrating!
Thank you again for your help!
Is your onboard calibration worked?
My accelerometer calibration was successful, and the attitude gauge responds correctly when I change the pitch / roll of the Pixhawk.
As mentioned above, I have only been able to calibrate the internal compass as (despite it recognising the GPS compass) the mag1 percentage remains at 0, so I cannot calibrate the external compass.
I assumed that if I had missed a major calibration step then the system would refuse to arm.
I am afarid I have already been through this article without luck.
ok I will check your bins later tonight…