I want the ability to fully utilize all the Aux ports in the Pixhawk and need little help.
So far I have figured out how to use one Aux Port, for example:
RC Rx is connected to PixHawk via S-BUS.
I set TX CHAN 10, to anything you like and assigned a toggle switch to it.
To move a servo off Aux 2
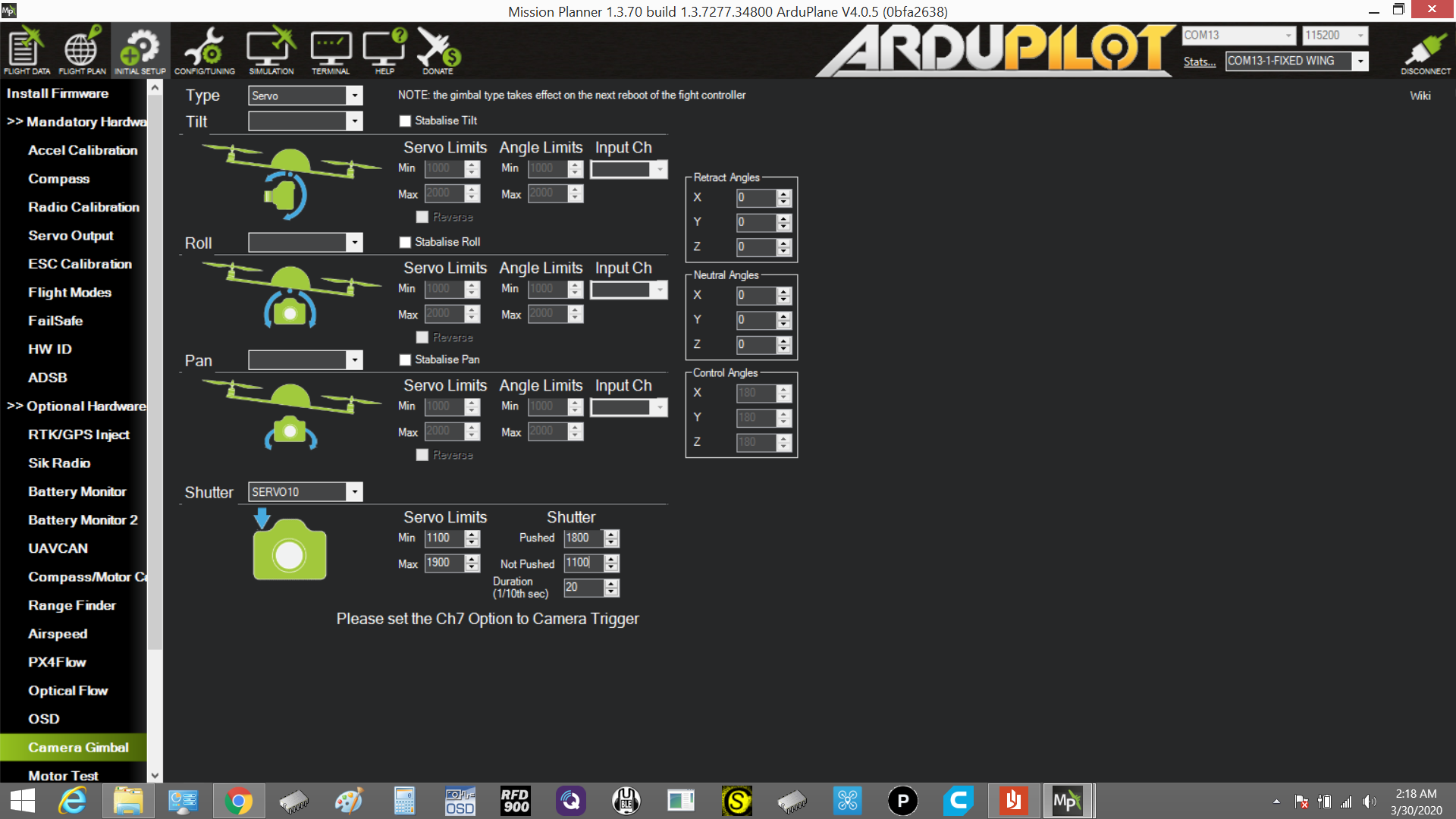
Inside mission planner “go to Camera Gimbal” section “Shutter Control”, from drop down select “Servo 10”.
Connect servo to Aux 2 pin.
Everything works fine.
few things are very confusing.
A. Ardu Pilot documentations says you must provide +5V to one of the Aux ports. It appears I can still move the servo with any +5V. Is Ardu Pilot documentation wrong?
B. if I want to control other servos via PixHawk Aux ports, how to do set them inside the Mission planner? it appears the shutter control is the only feature. Any suggestions?
C. What does it mean Aux 5 & 6 are relay? Does it mean it will give +5V when enabled? To me relay means a mechanical switch which is nothing more than an OFF and ON switch.
To control Aux2 from RC IN Channel 10 simply configure SERVO10_FUNCTION to RCIN 10 (60). If you want to use all 6 Aux ports for Servo’s set the BRD_PWM_COUNT to 6.
Setting BRD_PWM_COUNT parameter to 6 sets all Aux ports to PWM. None will be available for relays. Relays are configured by setting the Aux outputs to GPIO. So if you want 4 PWM outputs and 2 relays for example then set the BRD_PWM_COUNT to 4. Aux 1-4 (chan 9-12) will be configurable for PWM and Aux 5&6 (chan 13&14) can be configured for relays. There are other parameters to set relays
I don’t know what you mean by “anything in Mission Planner needs to be set”. These configurations changes are made from Mission Planner.
My other challenge is that my Futaba T14SG radio is linked to R7008SB receiver which is supposed to be a 15 channel receiver in Mode D.
Inside the Futaba radio when I go to the function section, its only listing channels up to 12. So I can only assign Aux 1,2,3,4 inside the radio. Not sure how to map Aux 5 and 6.
Sorry, no. I’m not familiar with Futaba. But looking at the Mode Table in the manual for the Rx perhaps you would want Mode B. Or maybe it’s no different than Mode D for Sbus only the PWM assignments.
I am using the S-Bus port to connect to PixHawk, not S-BUS2.
I have tried both Mode B and D.
Its a 12 Channel RX that’s why its only listing 12 channels inside the radio. The other two channels are hard coded to two knobs on that radio, DG1 and DG2
Kind of sucks :), Taranis Receivers gives you so many channels (up to 32) and at such a lower price point for the same technology.
Do you guys know what Futaba RX gives you like 14 + Channels?
I used quadcopter (generic quadrotor) f450 with pixhawk 4 , and i used pwm auxiliary pins from (aux1 to aux 4 ) , and i changed qground parameter to use actuators instead of motors, then i want to use servo , so i connected it to pin (pwm out aux 5 ) with external 5v battery, everything works good and i can control the servo from qground, but when i tried to control servo from Rc ( channel 5 ) I can’t as there is no response….
Anyone can help please ? @dkemxr