Hello! I am trying to get a really good flying f450 going, but I need some tips/suggestions on what the best motors + esc combo is. Anyone have any insight? From my perspective, I am starting with the bare minimum, which is the Amazon special: readyToSky 2212 motors and the SimonK 30A esc. But I am trying to work my way up!
I also started with the cheap plastic props, but have upgraded since then, and it has made a tremendous difference. I am hoping to get the same experience with esc and motors. I’ve been shopping around and found a pretty cool looking package deal from T-motor here (air gear f4502). Anyone have any insight on this package… I am really considering getting it. The package looks slick, but I do not have much experience with the brand nor drones to make an educated calculation.
If anyone has any suggestions, let me know. I am very curious as to what the best motors and esc are for this size of a frame! Similar size frame suggestions are also welcomed. If I find that this frame is fundamentaly flawed or something, then I will scrap it.
Buy the motors by themselves, without ESCs and props.
If you can better describe the expected weight and purpose ecalc will be able to find better motors.
Get a good BLHELI32 4in1 ESC
Get MasterAirscrew props
Get the aluminium replacement F450 arms - personally I would just get a different similar sized frame with carbon fibre arms and base plates - see link below, this frame has two clamps per arm at the base plates so it should be strong (I’ve never used this model)
I agree with Shawn’s comments. If you want to put more $$ into that frame another option is the G10 arms. Back when I tried putting lipstick on this pig I tried the aluminum ones and the extended G10 arms after damaging the former. Performance was OK. G10 arms
Dug up a photo of the old junker. 13" props on this frame I think with the extended arms. In hindsight it was a foolish thing to do but this was quite awhile ago…
We’ve been using the Holybro X500V2 frames at work and they’ve been really good. I’ve also used the Hexsoon EDU-450 frames. Also good, but I like the X500 more.
We get our kits from this guy. He specs different motors and ESCs, compared to the original Holybro kits and so far we’ve had really good success with them.
Just a plug for Rotorgeeks. Service has been great and I’m ordering from the US when they happen to have something in stock not available domestically.
Well for now, all I am lifting, besides the essentials e.g. battery, FC, etc., is a Raspberry Pi, RPi cam, Leddar One rangefinder… thats it. So no heavy lift.
I am interested in autonomous mission like detecting ArUco markers and landing on them with minimal error. Therefore, I am looking to build it with the cleanest flight possible. I am looking to build the f450 with components that will allow optimal tuning.
I am still researching, but I hypothesize that an optimal tune is required for autonomy.
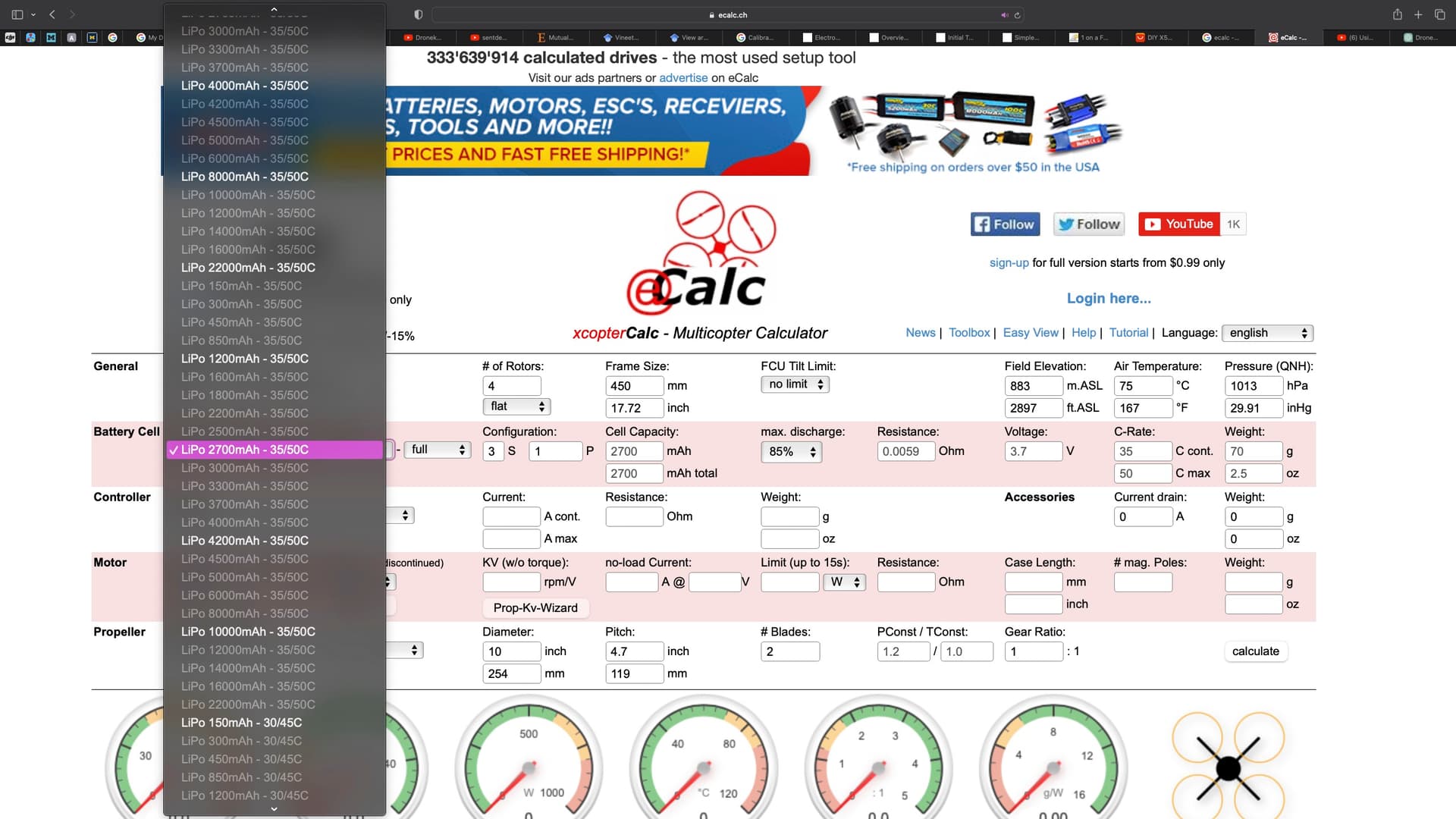
Interesting! I have not yet used ecalc, but I just explored their tutorial and it seems cool af. I was not able to select my battery though. It only lets me select the 2700 mAh, but I need the 3000 mAh. I attached a pic down below.
I have been looking into the 4in1 esc, but I cant seem to find any resources on wiring one to a pixhawk 1. With my current ESCs, I connect each one to the main outputs. I cut the power wire from all the escs but one, which serves as the power source. Should I be looking in the copter wiki for information on how to wire such a setup? Ive had no luck on YouTube.
I grabbed the masterAirScrews and they are incredible!! I was fighting with yaw bias for a while and it turned out to be imperfect arms, but before I knew what it was, with a lot of help from @dkemxr, I tried several brands of new props e.g. Gemfan, and DJI, but the masters brought the bias down the most. I love how responsive the drone is because of them! I thought they were going to be the worst of the three because of how thin they are, compared to the other two brands, but nope, they are the best of the three!
Thanks for the suggestion on drone frame. It looks cool and i really like the large surface area. I will let you know if I end up getting it.
I managed to get that yaw bias resolved with better arms. I believe that I can continue tuning now, so I am going to start from the top. I did a basic hover and now I am planning on adding a notch filter. Should I do an auto tune before trying to manually tune the PIDs?
In ecalc if you get the subscription all the items are available for selection.
Regarding that frame I linked to, I’ve used a couple of larger ones of a similar design from that store, and they’ve been good and very strong, and similar with two clamps per arm in the base plates. No plastic parts
This kit looks very cool, I like how they upgrade the kits! It is most likely the one I will get. Is there anything specific you like about the X500 frame over the Hexsoon frame, or just in general?
Usually, I’ll just use components that are very close to or equivalent to what I’ve got. Of course, ecalc can never give you perfect values so I just include that error in. That’s just me but I’ve got pretty good results with this technique over many years.
Also, for the ESC, I usually overspec mine just a little, like to 40A or something. Just in case I upgrade the Copter in the future, it saves me time and gives me that piece of mind.
Hey @xfacta, would a 4in1 esc like this one pair well with the pixhawk 1? It seems very tiny (the dimensions) but it seems to have everything I need. Does it matter if it was originally built for racing drones?
I saw on another one of your posts that you advised someone that a 4in1 gets connected to the aux ports, not the main output ports on the pixhawk1 and I was wondering more about that. I see on the pixhawk1 wiki that I must set the AUX SERVO connectors as GPIO ports, but I am confused as to how to wire the 4in1 to them. Would I have to connect each motor pad on the esc to one port in the same way the single simonk escs are connected? That would be a total 9 wires, 23=6 for three motors ground & signal wires and 31=3 for the final motor and ground, power, and signal wire. Am I on the right track (I feel like im not lol)?
Also, the 4in1 has connect pads for current, Lipo, tlm/rx2… All those have to be connected as well, no?
Yes, the BLHELI_32 4in1 ESCs work well and that one should too - what we look for is the maximum current per motor = 30A in this case.
And the battery voltage of course - most are 6S, few can do 8S.
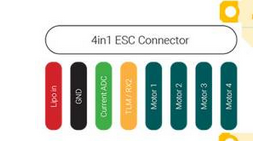
See the connector diagram there…
We only connect the 4 motor wires and ground wire to Aux outputs when using DSHOT. Connect Motor1 to Aux1 and so on. Connect the Ground wire to just one of the ground or - pins along that Aux row of pins.
If you load the bi-directional DSHOT firmware, that’s the only wiring change you need to make. This will give you RPM data to drive the harmonic notch filter. And all the DSHOT/BLHELI32 goodness of course!
DO NOT connect the red “Lipo In” wire to anything - a lot of these 4in1’s have this labelled as VBAT or similar. It is the full battery voltage and will destroy any flight controller pin it is connected to!
You still need the good regulated 5v supply for the flight controller, so keep the power brick between the 4in1 and the battery.
For the full effect of the ESC data, you can connect the Telem wire to a serial port RX pin and set that up. It will give temperature and voltage data as well as RPM. This is optional.
The current wire can be used in place of the current sense wire from the power brick, usually only do this if you are NOT using a normal power brick.
If you go ahead with that shout out and there is a bunch of easy settings to do for all these features → DSHOT and the harmonic notch filter driven by the RPM data.