Dear friends I was given a frame and motors, as well as a 3dr px4.
Do you guys have any advice on flight controllers and ESC to get ArduPilot running??
Also any advice on propellers? I have Tmotors MN4010 KV475
Im planning on using a 4s6p MJ1 pack or 6s6p MJ1
I have raspberry pis CM4 and zeros
You probably need about 12 inch props. Get the T-Motor carbon fibre props, they are good quality. If you can get cheaper ones that mount the same that might be a good strategy for first flights in case something goes wrong
13 inch or 14 inch might be OK provided the props wont over-fly the folding arm mechanisms or central plates. Using props that are unnecessarily large just introduces more tuning difficulties (and expense).
Will you be expecting some heavy payload, or just the usual camera or similar?
If that flight controller pictured is still with the frame then it will be OK to use with latest stable firmware.
Choose “Pixhawk1” when loading firmware.
You wont need any RPi’s or anything else unless you need a companion computer for some special task.
For ESCs you might be able to use one 4in1 BLHELI32 mounted centrally, just extend the motor wires to reach it. There are many advantages to using BLHELI32 → DSHOT protocol and telemetry data.
The BLHELI ESC would connect to the AUX outputs, not the MAIN outputs on that flight controller.
You’ll need a GPS unit too, with built in compass. Connector to suit Pixhawk1.
I recently got a set of Master Airscrew 11x10 “3X power” tri-blade props to try on a 2kg quad that previously used MR series 12 and 13 inch props. The 13 inch MR series props produced the longest flight times with 660 and 700kV motors on 4S to 6S power (I’ve used a bunch of combinations just for curiosity’s sake). The tri-blade props come with a slight penalty in flight time, owing to their increased mass, but they run super smooth with noticeably less vibration. Hover throttle (by percentage) is very similar between the 13x4.5 MR series and 11x10 3X series. The tri-blades also make the copter feel a little snappier in response after a nearly identical tuning process.
It’s very poor practice to do initial tuning without RC control. Once it’s tuned and flying well, you can start flying fully autonomous, but it’s usually a good idea to retain an RC link.
ok guys a bit of an update:
I ended buying an exotic 4in1 esc without knowing it.
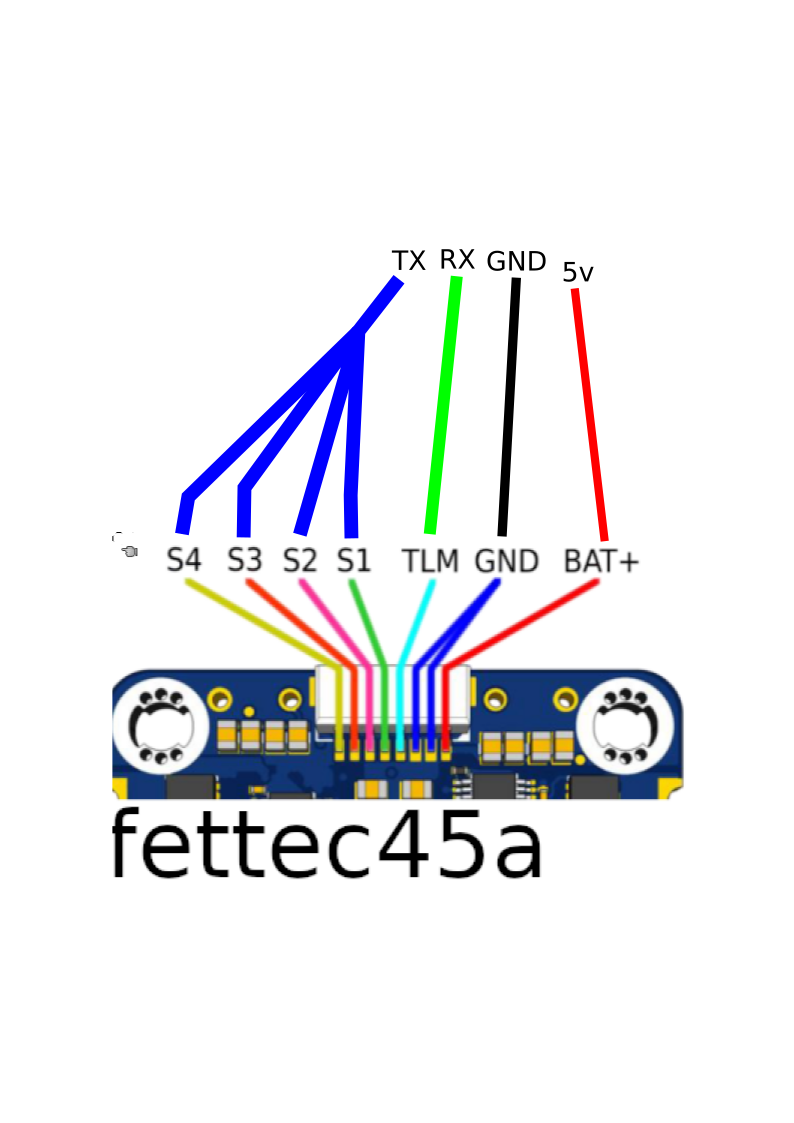
fettec 45a and speedybee f405 v3
I have wired them correctly apart from the “onewire”.
On the documentation of fettec they say to wire it to “RAM” pin of betaflight boards.
God what did I do
Thank you so much, i found the info with better look at paragraph “Connecting”
To clarify wiki
The signal-pins S1, S2, S3, S4 from the ESC are used to receive the commands from the flight-controller, so the serial TX from the flight-controller must be connected to every signal-input in parallel.
A halfduplex 2MBaud/s serial connection is required for the use with the FETtec configurator, which is currently not supported by ArduPilot.
I’m having difficulty connecting ttl adapter, I will try a different one
I have order half duplex rs485 adapter to program the fettec, until I get confirmation that passthrough works
Today I was able to fly it correctly. The first two attempts failed spinning out on its back, that was with frame type “betaflight_reversed”.
Once in “x” and servos switched it felt very maneuverable, unfortunately the voltage quickly dropped to 22v.
It weighs 1.4Kg with the 6s 3Ah but without 13in props.
I want to setup elrs “airport” and a bigger battery, I also need to dive deeper in the different modes, I’d like to figure out position hold and auto landing or at least softer.
It also feels like the quad is a bit dangerous to learn on, might want to find something lighter than 400g.
Is there anything wrong with having a button as instant disarm?
5 second disarm is very long…
Apart from setting up a switch for Arm/Disarm (or a combination of switches depending on your transmitter and mixing) you can also have an Emergency Motors Stop switch
I’m getting more and more comfortable with arducopter and am very happy overall.
one problem is that the copter shoots up randomly when on missions.
I had the copter go back and forth a field several time, at some point it just shot up from 10m to 20-30.
my guess is barometer interference… how do I mitigate that? my FC is in the open air.