Those props looks small for that frame size, and potentially the allo-up-weight. What are they?
Flat arms like that are usually bit of a problem too, they suffer from a lot of vibration from the prop-wash.
Get you .bin log file from that flight and share it with Dropbox, Google Drive or similar, and post a link here.
You can’t expect that craft to perform well on default parameters and running Auto Tune in that condition is futile. All-Up-Weight=What does the craft weigh with the battery.
Yes , because I was learned like never blind to operate your copter (all switches defined to know this switch mode is this and this switch mode is this and I was mistake like I switched to break fm but it’s full acro mode and … Drop down my copter nearly 30m )
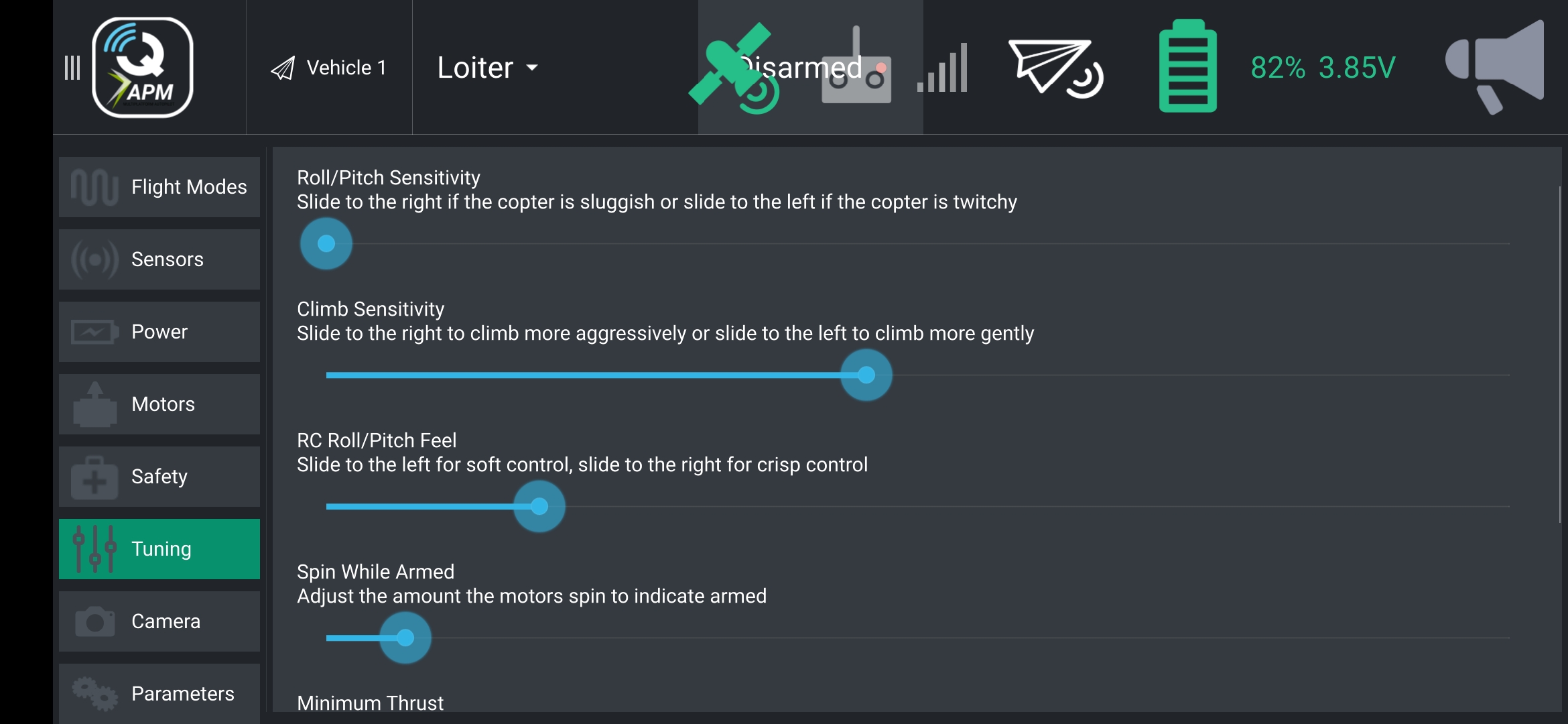
Also my throttle curve not save (accidentally unsaved this point )
And never never never run your copter without autotune
I’m used 2700kv on 4s , 5s and 6s battery so I need throttle limits and yesterday I’m on 6s and no limits thank god I’m save my copter during crash , it’s running on 6s it will be fry my last 4pcs motor
How it’s possible I’m not capable for pre understanding this larger or mini copter like nearly this pid value and also I want to make new frame
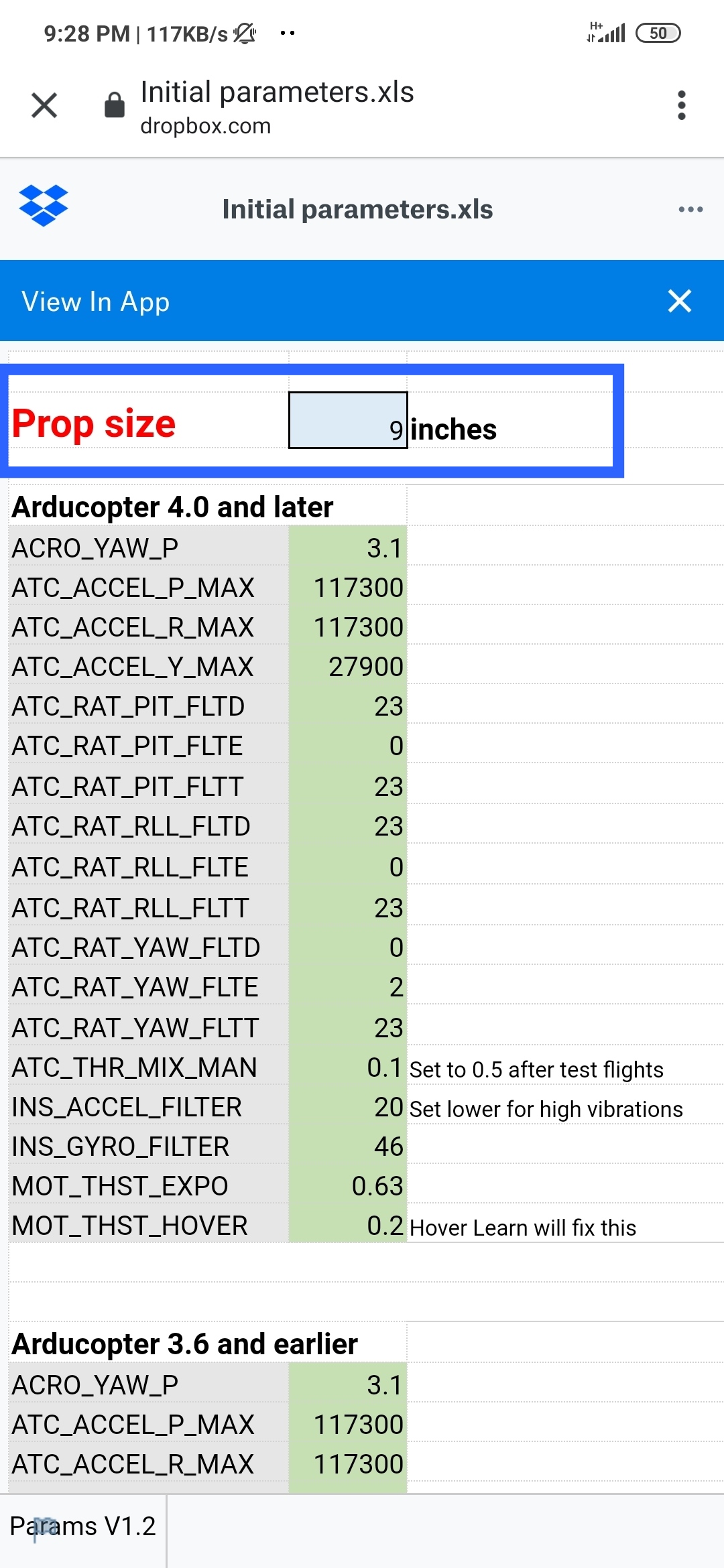
This is a martian 220mm freestyle frame and pixhawk is not center and I’m change some function like this ins_gyro_filter finally I show that when I set to 220hz then my copter is little bit stable (less oscillation also no more twitchy)
And ins_accle_filters for, like smooth roll and pitch , I’m right ?




 )
) )
)