Hi, I have a problem in auto mode with a quadcopter, flight well at started but a little oscilations begin after a few waypoints. It flight well in stabilize and Althold, in Loiter mode isn´t perfect, the wind affect a little its altitude and position, autotune already did it.
The follow things was proved:
-
Change EK2_ALT_SOURCE to 2, and EK2_ALT_M_NSE to 6, this improved the AltHold Mode.
-
reduce LOIT_JERK from 1000 to 500, and LOIT_MAXA from 200 to 100. It seems works, a little. but I don´t want reduce more because is out of limits.
-
Reduce ATC_ACCEL_P_MAX from 4000 to 3000, no change noted.
-
Limit ANGLE_MAX to 25. no change noted.
-
Also change the PID values of Pitch axis to same in Roll, the picture shows the original PIDs after autotune.

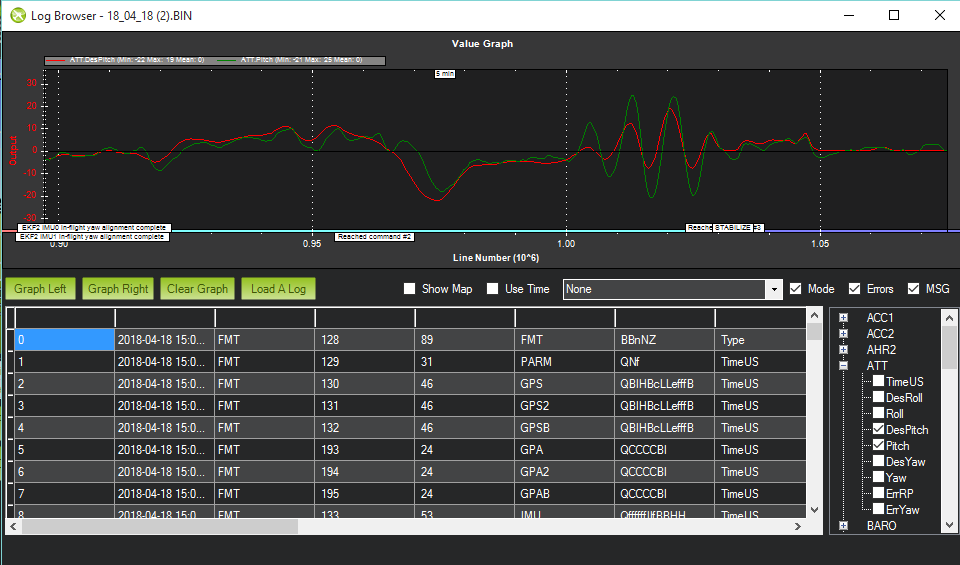
The oscilation it can noted in the follow image, the bin file is also attached. This logs is from 3 days of test.
https://drive.google.com/file/d/1XO-BmHHbsUIV-BtWJteSd9NN8djWeIR1/view?usp=sharing
https://drive.google.com/open?id=1UOCsVhIxKEvHzHzIAbL7EyHhta2YNhgT
https://drive.google.com/file/d/1WerqKhiigx7QVU9Ka9S8yG1AObsMA7r5/view?usp=sharing