Hi,
I have a build which is really overpowered (the servo outputs are around 1300, with a lot of saturated values of 1200). This is my setup:
- U8 135 kV Motors
- TURNIGY K-Force 120A-HV ESCs
- 12S (2 6S 16000 mAh LiPos in series)
- 29*9.5 TMotor Propellers
AUW of about 9 kg (my payload includes a somewhat heavy gimbal and camera).
I have trouble tuning the PIDs to make it fly decently in Alt. Hold (I really want to do an Autotune, but without good behavior in Alt. Hold there’s no use in trying). Moreover, the motor - propeller combination makes my frame vibrate a bit (although I’m not sure if it’s a tuning issue).
I made the following assumptions for some parameters:
ATC_RAT_PIT_FILT = 10 (default was 20, changed because of recommendations in the Autotune page)
ATC_RAT_RLL_FILT = 10 (same as ATC_RAT_PIT_FILT)
ATC_RAT_YAW_FILT = 10 (same as ATC_RAT_PIT_FILT)
Should I decrease this down to 5, for example? What determines if this value is too low/too high? Maybe something in the flight logs?
I used my radio knob to tune the ATC_ANG_RLL_P and ATC_ANG_PIT_P to 6.7, which makes the flight in Stabilize a little controllable (it’s not as smooth as I would like, but at least it responds quite good in roll/pitch).
I was trying to tune ATC_RAT_RLL_P and ATC_RAT_PIT_P in the same way, but when I was lowering the values the copter crashed. The original values (seen in the log) are 0.09, and it became uncontrollable at 0.085, which was the value where it crashed.
I have two logs for today’s flights: one just Stabilize and a bit of Alt. Hold, which was the tuning of the ATC_ANG_RLL_P parameters and another one in Alt. Hold, which was the attempt of tuning the ATC_RAT_RLL_P and further crash.
I have a couple of concerns with both logs, which I’ll describe below:
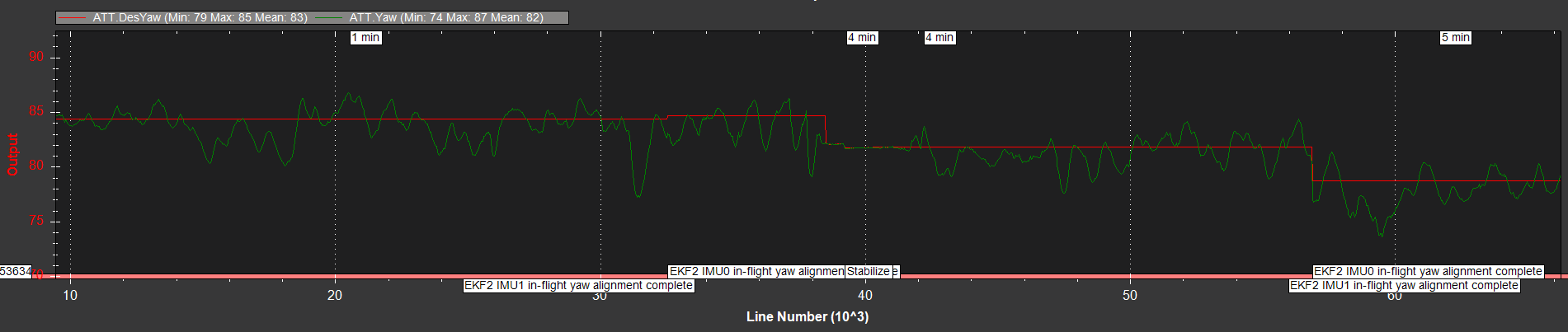
00000004.BIN
- The yaw is really twitchy, I’m not sure if I should tune it using the ATC_ANG_YAW_P as I did with the Roll/Pitch, but the response is really bad as it is.
- The roll/pitch is better with the ATC_ANG set to 6.7, but I still have some oscillations, specially when the desired value is a flat line at 0. What parameter should I tune to improve this (I haven’t deal with I and D gains yet, I’ve been just tuning the P parameters).

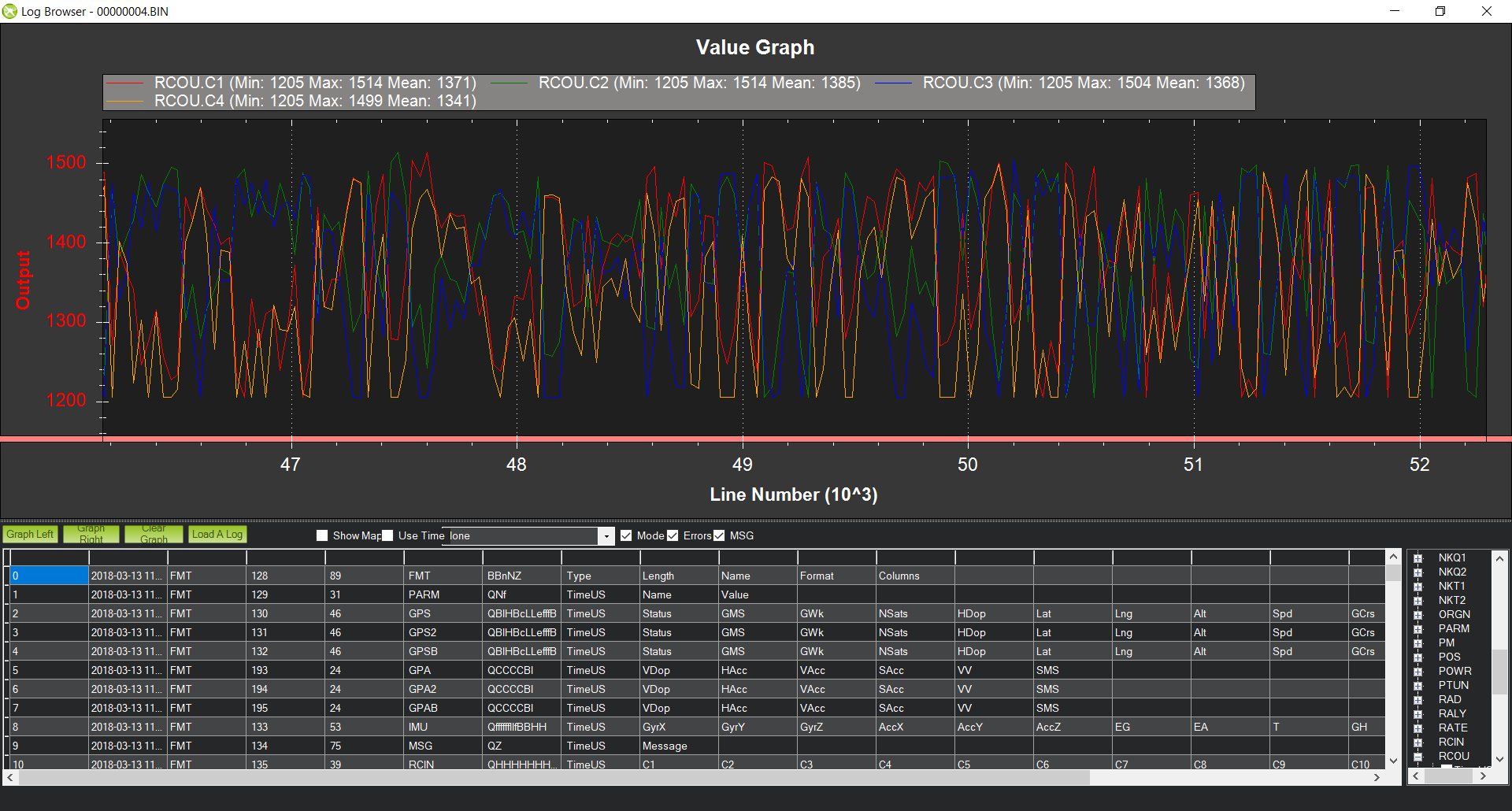
- The motor outputs saturate a lot at 1200.
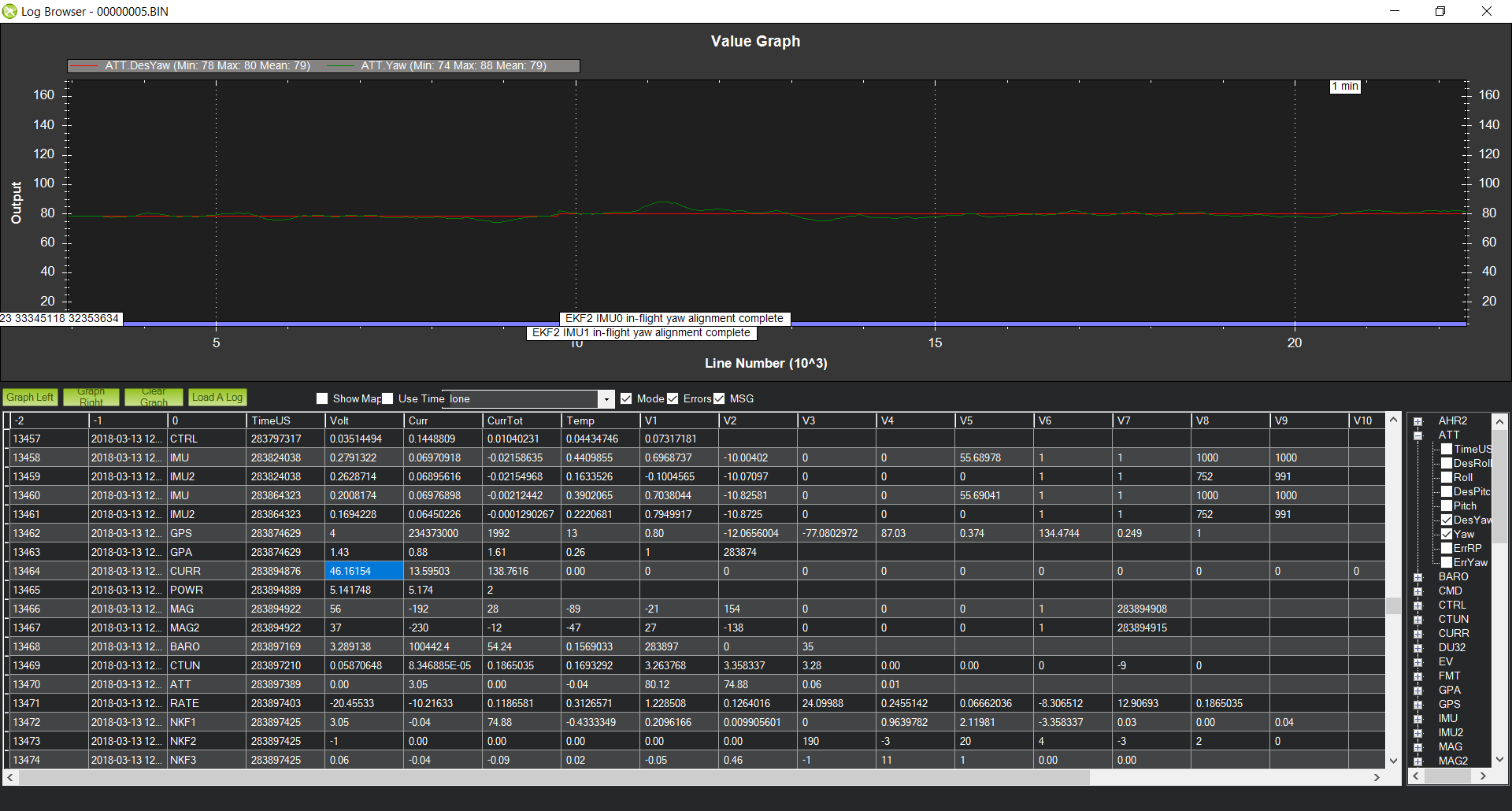
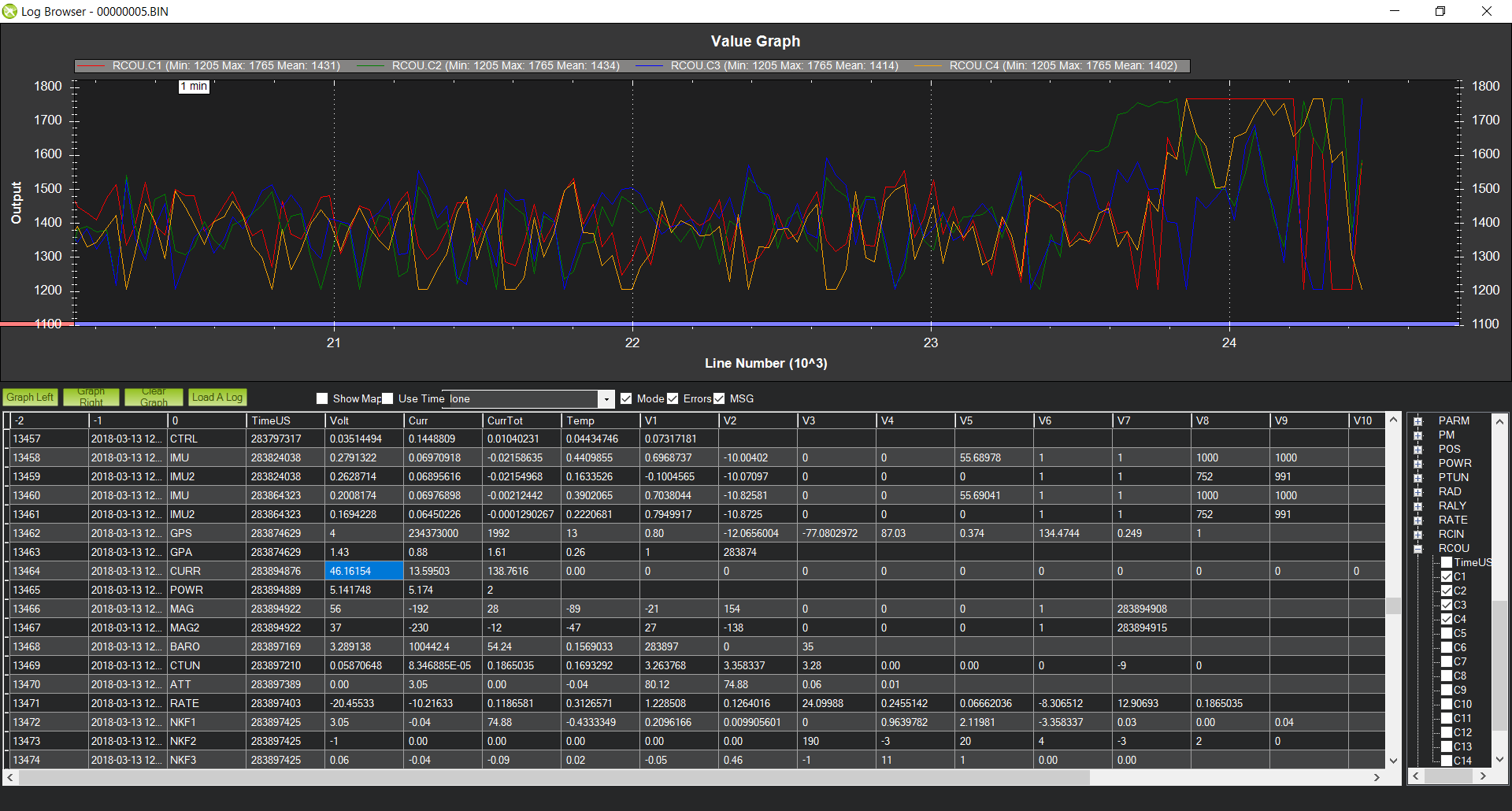
00000005.BIN
- The yaw magically corrected (or maybe there’s something else I’m not seeing). I only changed P values of roll/pitch, how can the yaw have improved?
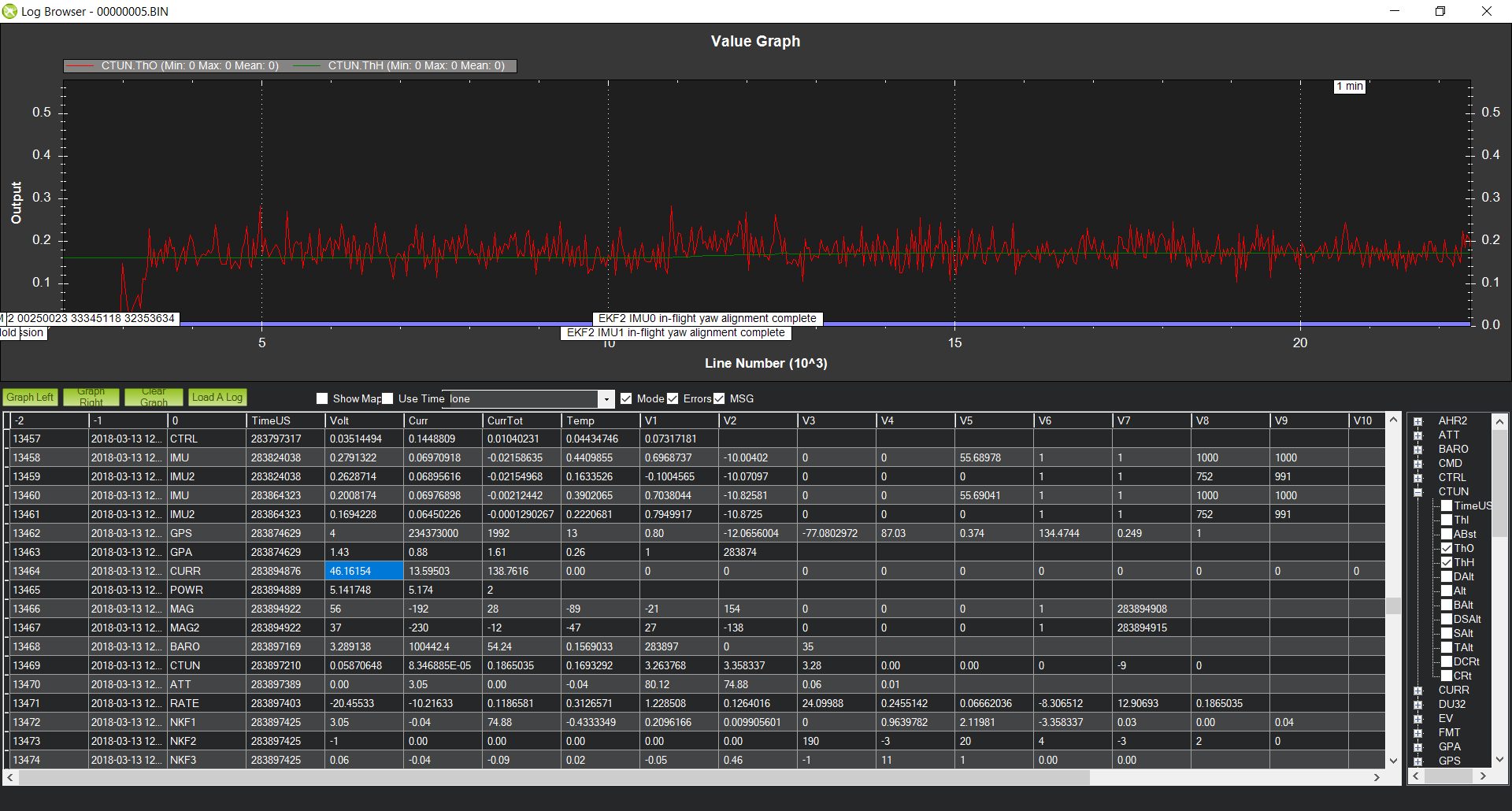
- The ThO and ThH values are really low (around 0.15). I thought the recommended values were between 0.2 and 0.9. This and my low servo values definitely tell me that the copter is overpowered, but what happens when this values are too low? Is there any side effect of this that could affect my flight?
- Again, some servo values saturate at 1200 a lot. In this case, when I reduced my ATC_RAT_RLL_P and ATC_RAT_PIT_P to 0.085, I can see in the logs that the output of C2 goes higher than normal (then followed by C1) and it’s at that point where the drone crashes.
My theory of why this happened and some other weird errors in flight is that since the copter is overpowered, sometimes some motors go to 1200 and saturate for a lot of time. Because of that, while tuning manually, if one output goes high, the other should go lower, but because it’s already at 1200, there’s no way it can go lower and to compensate the opposite motor goes higher than it was supossed to be. That’s why it went to a high value and the copter crashed. Does this make any sense?
For now, I’ll replace the damaged parts and reduce the propellers to some new 26x8.5 (the smallest I see the U8 motors allow). Maybe I could also add some weight to make this servo output curve go a little higher.
I also noticed I have somewhat high vibrations in the Z-axis, but my Pixhawk is heavily damped, so I’m not sure if I can do any better than what I currently have.
Do you have any recommendation? I’m sorry for the lengthy post, but there are a lot of doubts I have with this type of configuration (slow motors, big propellers) and they could help anyone else looking for information.
Best,
Javier