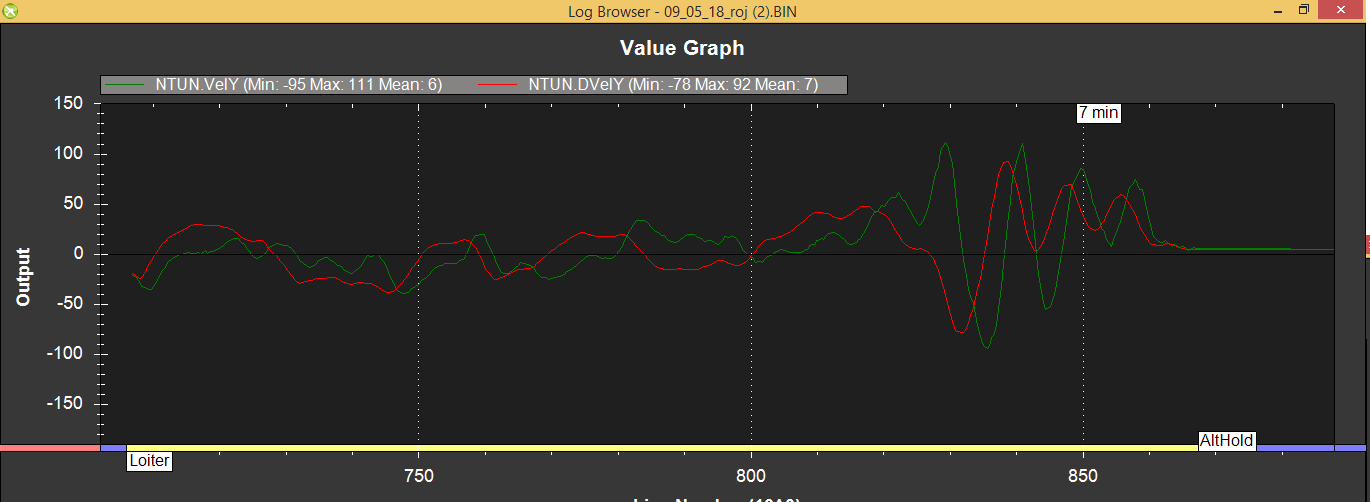
Yesterday, I tested the quad in stab, althold and loiter mode, and high wind conditions. In stabilize and althold is controllable by the pilot, but in loiter mode the drone oscilated in both axes (roll, pitch). The hardware:
-custom frame 1280mm
U8 motors 135Kv
2x6S 16000mAh = 12S battery
ESC 120A-HV turnigy
PIXHAWK firmware 3.5.5
22x6 T-motor propellers.
total weigth (included gimbal) 9.5Kg
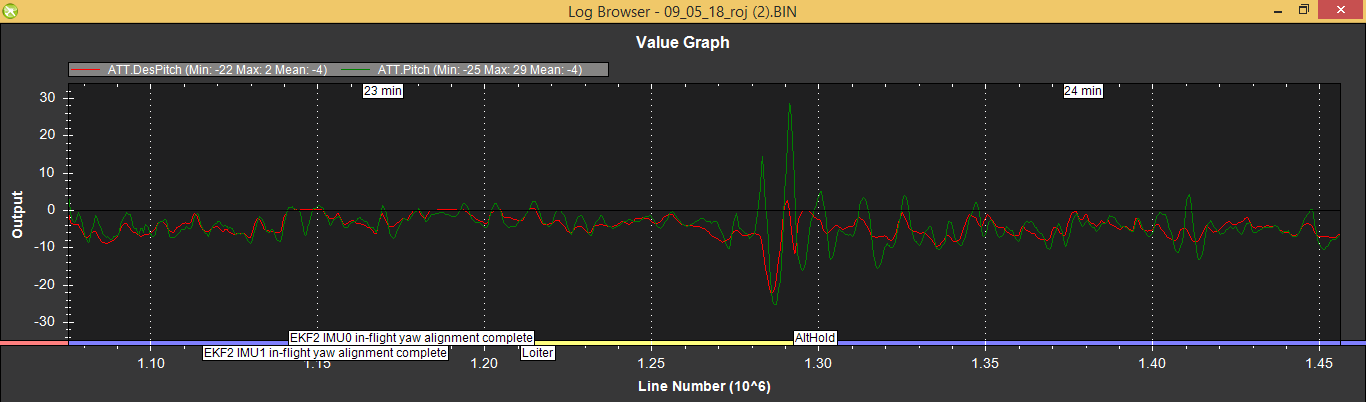
In the flight it was used the autotune parameters, with a little adjustments in accelerations for the auto mode (Pitch axis Oscillation in auto mode, big copter)
The wind speed was 7mps with gusts until 13 mps.
That’s a big rig for sure with 22" swingers on it. I would start with verifying that the props are balanced. I know that sounds crazy, but out of balance props can make those axes oscillate if not balanced. Especially in high wind and having 22 inch props just compounds it.
That’s my two cents anyway. I would wait until you have a calm day to see how it responds then.
Hi Mark, thanks for your reply. The quad flight very well with no wind, and days with 3-5 mps wind speed also flight will (stabilize and althold), in loiter mode it isn’t a rock but maintain its position.
So if I am understanding this, it flies in light winds in Loiter with no vibrations.
Have you looked at the aeroelasticity of your frame?
At the wind speeds you are talking about the 22" props will be acting as much as a wing as a propulsion source.
This will induce a lot of torsional forces on the arms as well as assorted vertical forces.
It might be that the frame is just not rigid enough for those wind speeds.
I looked up the specs for the U8 135 kv and if you have 4 motors, 6s, and 9.5 Kg its amazing it flys. I couldn’t confirm this because I can’t open your .bin file. Here is the specification chart from T-Motor. Also a 22x6 prop is not on the chart. Check your bin file and see what the RC outputs to the ESC’s was doing. Somethings not right.
I was running 350Kv motors on 6S swinging 1755 CF props.
In no wind conditions she flew just fine, but add a little wind and she was all over the place, and running AutoTune didn’t help.
To fix the problem I dropped the “wheel base” to 665mm and ran 1655 CF props. Now she is stable as a rock.
I don’t have any empirical data to back this up, but based on the quad frame sizes available and the stability differences I observed between the 1040mm configuration and the 665mm configuration, my gut feeling is going over about 700mm or so is with a quad frame can be counter productive.
Not only that, T-Motor recommends a max quad AUW of 8Kilos swinging 29" props on 6S, and you’re lifting 9.5Kilos on 12S…
To lift a 10Kilo quad T-Motor recommends going down to 170Kv swinging 26" props on 6S. Even so, when you do the math, using 26" props, the minimum “wheel base” comes out to ~965mm.
To get this I use 27" as the prop length to give 1/2" tip clearances. The square of 27 is 729. 729 + 729 = 1458. The square root of 1458 is 38.18. 38" is 965.5mm…
So you are still looking a 1000mm quad. If I was doing this I would go with a hex…
Another option is you could go with T-Motor U7 420Kv motors swinging 18 x 6.1" props on 6S and have a 690mm quad that would be able to lift 12Killos. http://store-en.tmotor.com/goods.php?id=321
Looking at the motor data chart, the aircraft would hover slightly below 50% throttle. Based on having 32000mAh from 2 6S 16000mAh batteries in parallel, if we extrapolate a g/w efficiency between 7 and 8(although the g/w may actually be slightly higher), your hover flight time would be between 25 and 29 minutes.
Holy S**t ! I cannot comprehend who can someone spend more than 1600 usd for motors and tries to drive them with hobby grade turnigy ESC’s. Those ESC’s are even not multirotor ones. Please replace them with something like T-motor Flame…
Unfortunately it’s that ESC, it was chosen for the 12S range,
although there does not seem to be synchronism problems. That may be the reason for the slow response in wind.
Thanks for your advice.
I was thinking about reducing the frame, but if it does not work I will not be able to return to the previous configuration unless I replace the arms. (I’ll test with 26’’)
A bit more detail on the frame and setup might help, have you got any images of the setup about? Do you have a large damped mass somewhere, camera gimbal and batteries or similar? Also, have you tried manually tuning the PIDS?
do you get a consistent tune with autotune? I found with one build each time I reran autotune it would come up with different tunes. Also flew fine in stab/alt hold. Manually tuning worked though, now flies very well. In that case I’m sure it was becuse the battery, camera and gimbal, totalling ~2.3 kg, were mounted on a damped platform with quite a bit of suspension travel. Locking off the bobbins helped a bit, but in the end a manual tune was the answer to getting good flight performance in auto mode with wind…