Hi. Try to understand how diagnose correct PIDs for small wing (Dart 250G)
Is any reference values for PIDP.D, PIDR.D? Which value reads too high
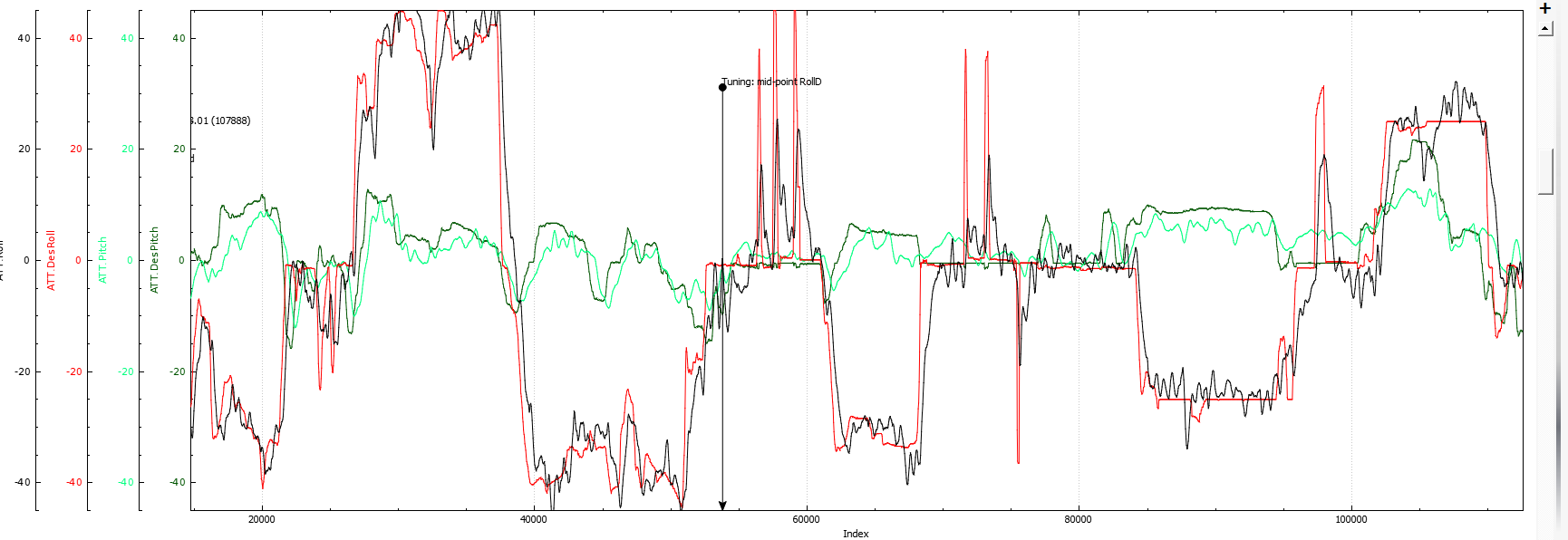
here current graphs for roll and pitch
2 Likes
+1
Relevant for me too
I prefer to look at the output from each part of the controller. That allows me to see what gain of of the controller might be too high to too low. Beyond that you need to understand how PID controllers work and how to change gains to achieve a desired stability or control response.
1 Like
so, if PIDR.D oscillating does this mean PIDR.D is too high?
Or can this mean that PIDR.P is high, and the D component is trying to compensate it?