Greetings everyone, I designed a system featuring a dodeca configuration of a Hexa frame with Co-Axial motors (Motor U15L) and a 47-inch propeller. The all-up weight (AUW) is 230kg. Following manual tuning, the system exhibited stable flight characteristics, and all parameters were verified to be satisfactory.
However, during a low-voltage situation at 78V, an unexpected guest arrived, causing increased oscillations in roll, leading to the system flipping in mid-air and ultimately crashing.
I kindly request you to review the attached log and provide suggestions regarding my errors. Note: I utilized Quick tuning as well. At times, I noticed the system may have been undertuned, but it generally remained stable.
Other issues I found (that are probably not responsible for the crash but aren’t good practice either):
IMU temp cal is missing
ATC_THR_MIX_MAN is set to 0.1, it should be 0.5
MagFit is missing completey and for compass 3 (which is set to use) even static iron calibration is missing (I acknowledge it’s not easy on a big drone but that’s what “Large Vehicle MagCal” is for)
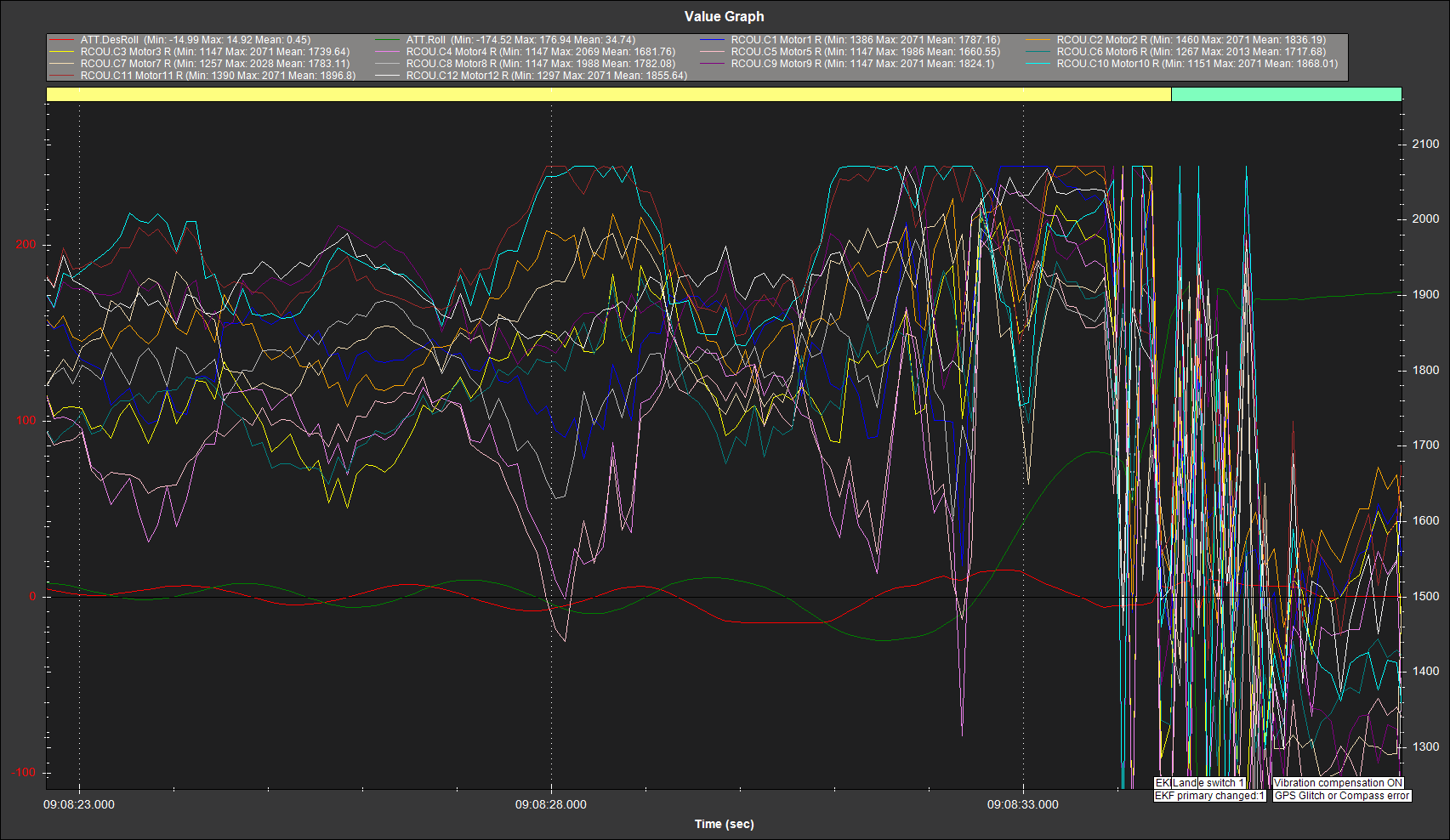
With lower voltage your motors RCOUT values increased a lot at the end of the flight limiting the ability to recover from hard maneuvers.
Is your battery a LIPO or LIION? From the logs it seems a LIPO and you where flying below 3,2V per cell so at that point the cell voltage drop rate is very high. It think you just flew the drone too long for your battery.
Also you flew around with ATC_THR_MIX_MAN at 0,1 which is not recommended. This value should be changed to 0.5 after first sucessfull hover flight.
I am using Lithium Ion solid state battery which is recommended to use upto 3.0 V per cell. I have change the ATC_THR_MIX_MAN to 0.5 but did not find any difference then i changed back to 0.1. Anyway thanks i will change it back to 0.5 again.
thank you for your quick response . Can you please check once roll & Des Roll and Pitch & Des Pitch is perfectly following or not during flight in Loiter & Auto Mode.
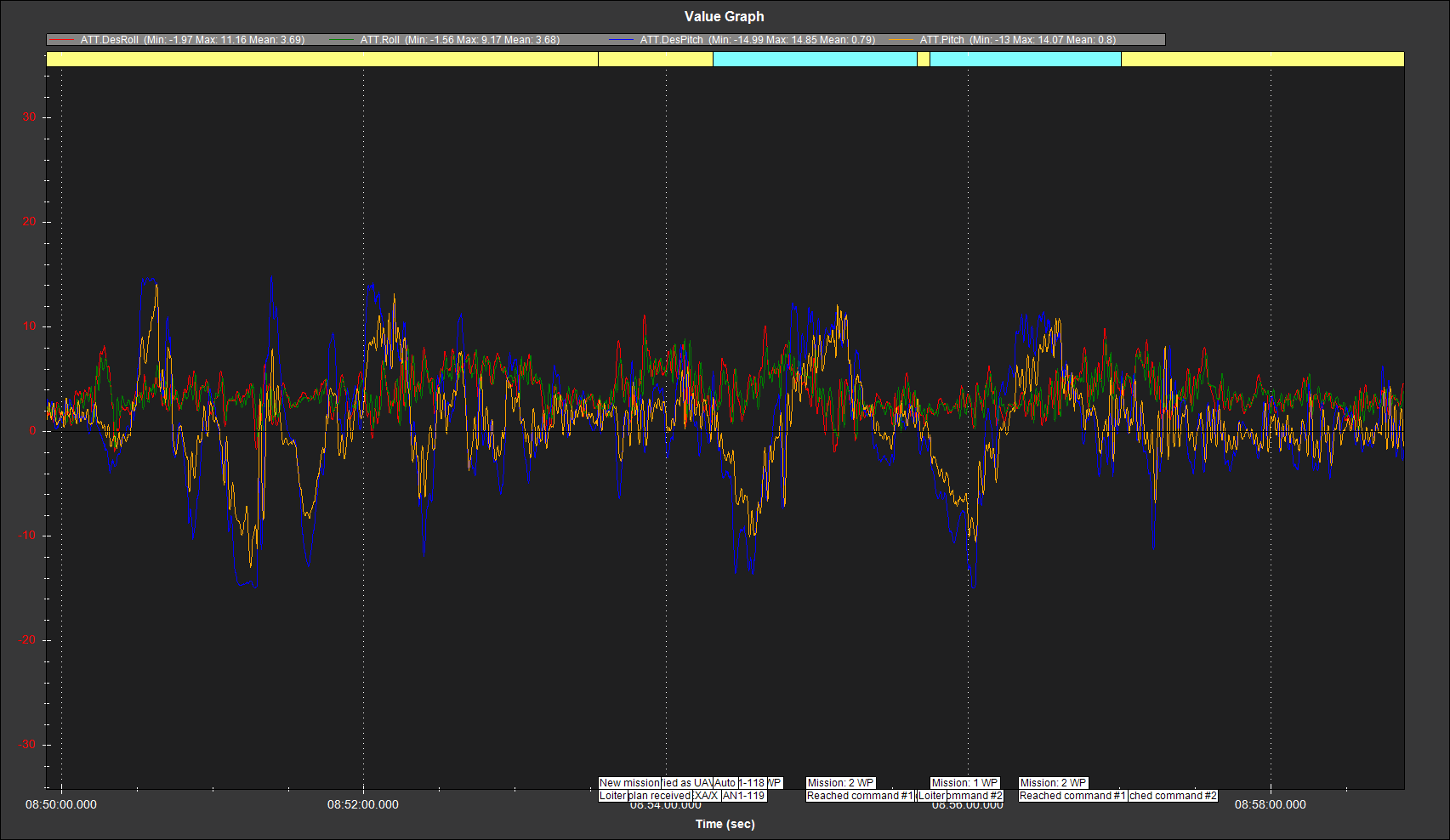
This is a section of the flight where there was a bit of movement (as an example):
DesRoll and Roll are following closely, DesPitch and Pitch not so much. Pitch eventually gets where it’s supposed to but it could be better.
Also there’s no difference visible between loiter and auto.
In Loiter when we give a roll/pitch jerk from stick it oscillates almost for 3/4 times and then gets stable . This made me feel its under tuned (may be i am wrong)
During landing at 5m say, the drone was wobbling by 5 degrees in both pitch and roll axis
If I’m reading this correctly, you have a 1/4 ton copter with 12 x 4 foot props running at 80+ volts, and it’s missing some basic, rudimentary tuning steps.
This sounds like a recipe for disaster!
You should consider professional help to get this thing running right. I know @amilcarlucas offers that service (or can point you to the proper resources for it).