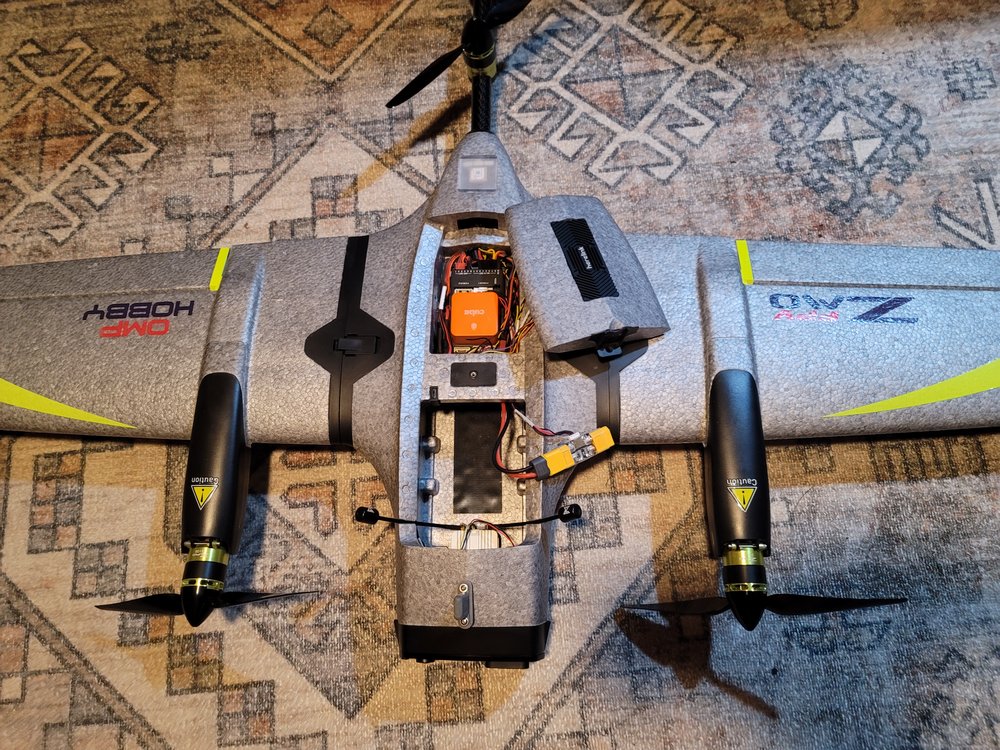
Starting a thread on the OMP ZMO airframe. I received mine with a defective flight controller so decided to install a Cube Orange. I will document and share my process and findings here.

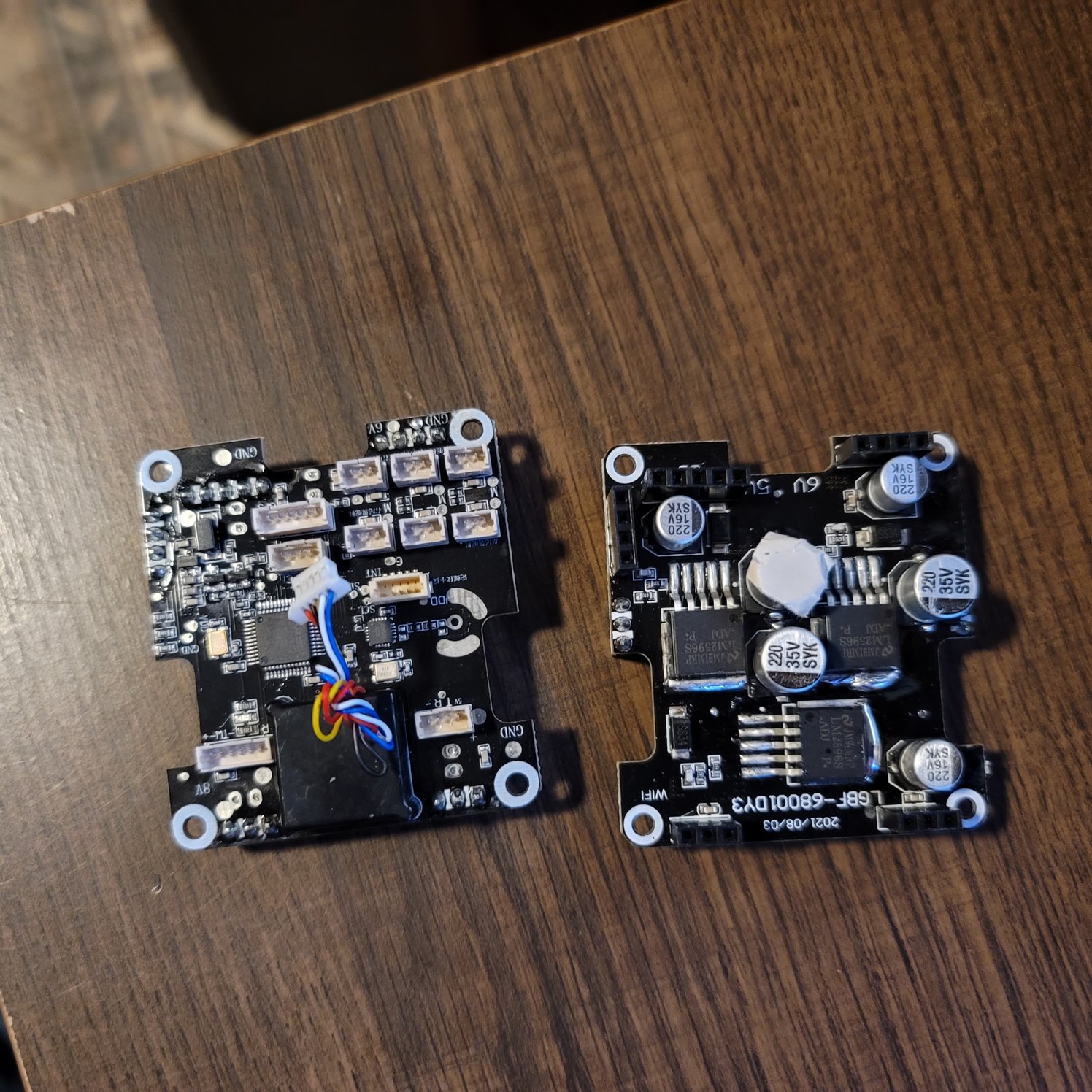
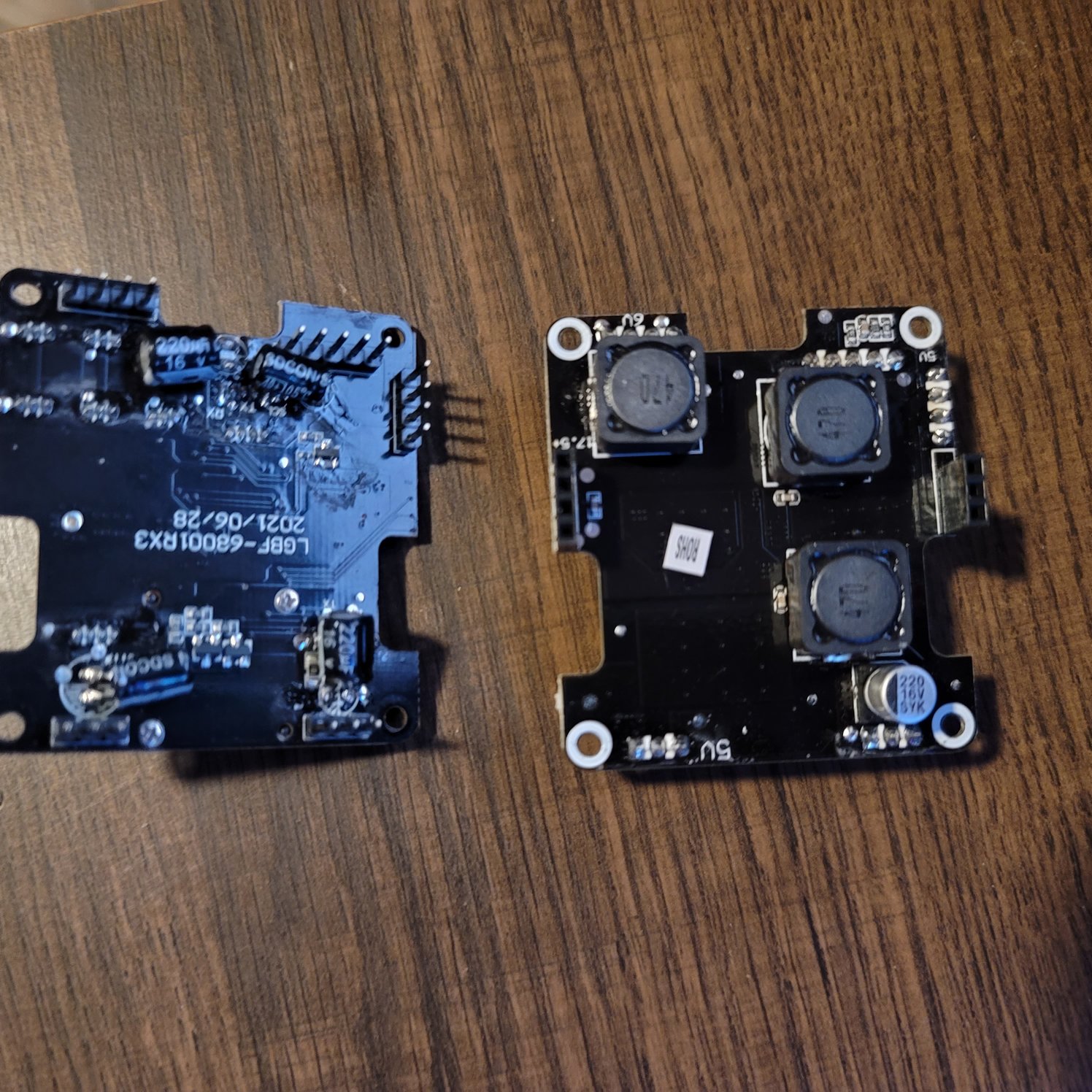
My plan was to connect a Skydroid or Crossfire RX to the ZMO via SBUS. There was an SBUS port but no pinout. The manual for the ZMO is useless. I finally found the pinout on another forum and connected my CRFS and set up the channels as suggested. With sticks centered both elevators were maxed out to one extent. One tilt did not work either. I swapped the tilt connections to the FC and it followed the port. There was no usb or easily visible com port on the board so I had no way to try to fix the issues. The system is 3 layers with FC on top, regulator in the middle and a 3 channel ESC on the bottom. I left the ESC in place as it had labeled PWM inputs and a header for direct power out. So far I have all servos connected and tested and will be setting up the ESCs next. On that note, they tightened the spinner bolt so tight I can’t get them off. The cheap torx bolts strip as soon as you put any torque on them. So, test the ESCs are going to be risky.
Otherwise, hardware consists of:
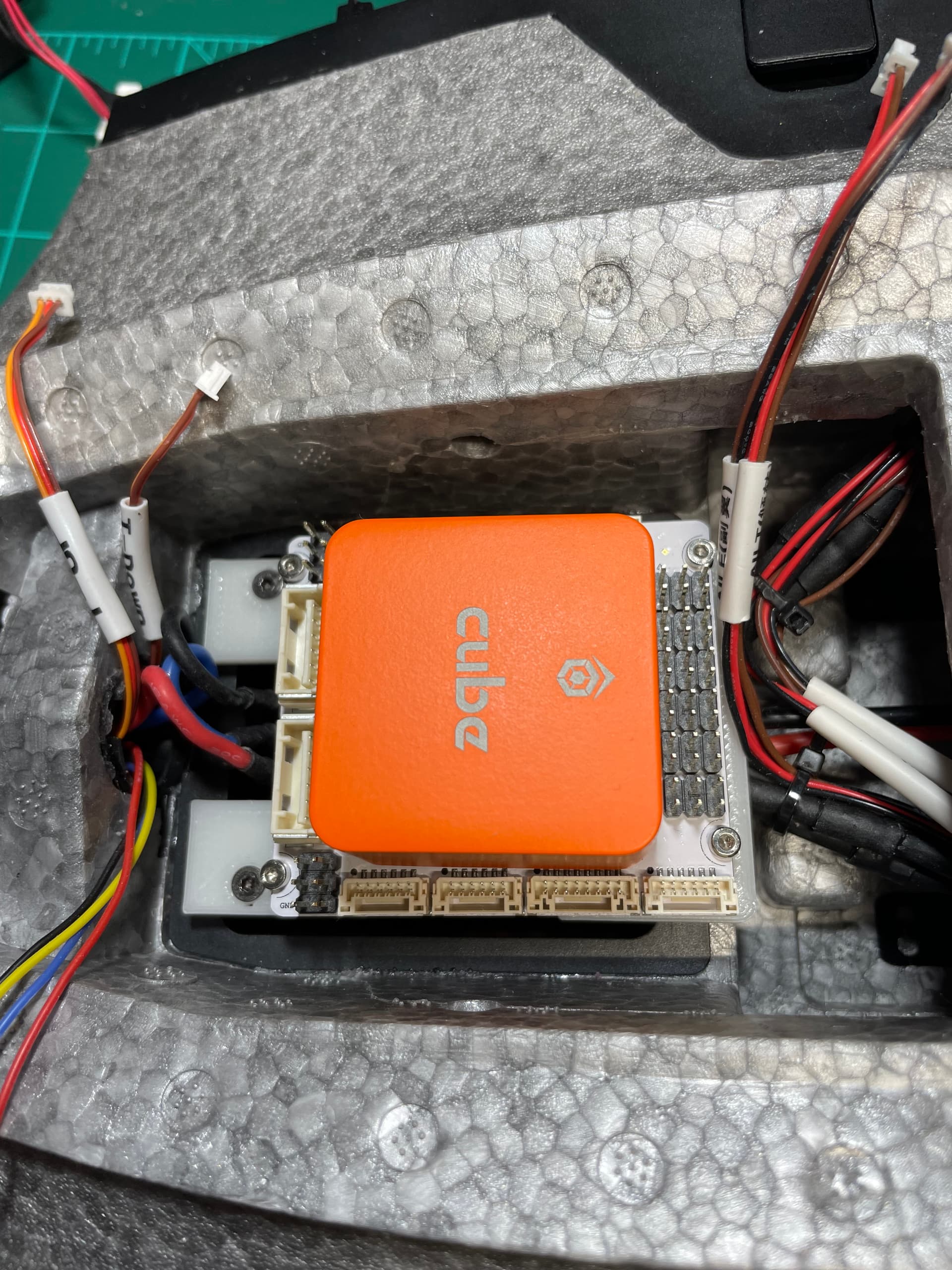
Cube Orange with ADSB carrier board
Matek M8Q-CAN GPS
Matek ASPD-4525 AS sensor
Herelink radio
DJI Airunit
GoPro with hdmi out to the Herelink (Researching other pan/tilt gimbal cameras)
Castle Creations BEC for servos
12v step down for air units
I also printed an adapter to mount the carrier board. (Attached)

ZMO Cube mount.stl (177.1 KB)
1 Like
First hover flights done. Still have a little work to do on yaw tuning. Once thing is for sure. using better hardware is the way to go. I have had several issues with Matek controllers (765wing, 764wing wse, f405 etc) but this Orange cube is awesome! No drift or other strange issue. Just stable.
I have had some additional issues with the ZMO hardware however. Dont trust the stock servos. I had the system powered on while adjusting the params in mission planner and all the sudden my servos lost power. Something was shorting out the BEC. Double checked all connections and wires. Finally pulled out my Seek thermal camera and immediately found one of the vtail servos was hot. Unplugged it and everything worked again. Tried a servo tester on the servo and it let the magic smoke out of the tester. It is toast. Maybe this is what damaged the stock flight controller. I was able to remove the vtail and servos and replaced them with THESE. I had to trim the mount mounts on the servos and in the tail but they worked great.
I am hoping to finishing tuning this weekend and test forward transition and FBWB next weekend. Otherwise I am still working on;
- Making my own 2.4ghz antennas. The once that come with the herelink are just too big and bulky. I am going to make some dipoles.
- I am waiting on a few micro hdmi cables to connect the GoPro to the Herelink. Ended up buying a GoPro 7 Black just for this as that is the latest with a true hdmi out.
- I am struggling with having Mission Planner running properly on the Herelink. If anyone has any input, HERE is my thread for that.
FYI I am also building a Heewing Ranger T1 vtol and have a Swan K1 that I swapped for a Matek and ardupilot. It is mostly done but will do some test flight tomorrow. I am on my 3rd FC with it and will be slapping an Orange cube in it if it gives me any more grief.


2 Likes
Finally have the yaw tuned. Got it pretty close manually then performed an autotune which seemed to get everything right but the P. I was able to get it locked in my just increasing the P.
Otherwise I made some antennas for the Herelink and have them installed. I am waiting on the final parts needed for the custom GoPrp to Herelink video cable. I also need to make a cable to power the GoPro. Even with the additional weight of the Cube Orange, this thing is slightly nose heavy with the GoPro installed. I am hoping to get it a little closer by removing the GoPro battery and powering it from a BEC. I will probably test fly FBWB next weekend. Oh, and I got a review request from BuddyRC. I bet you can figure out how that went! Params attached for anyone interested.


ZMO_Tuned.param (24.5 KB)

4 Likes
Hi Techspy,
Thanks for the tips. Some questions:
-
I have attached a photo of the bottom board (is that a BEC or ESC?) that connects to the battery. How do I control the motors with the orange cube? (what wire goes to what?) It looks like this is an ESC? There is an S1, S2, S3 pin on the board.
-
How do I give the orange cube power? It looks like there are some 3.3V rails on this board. Do I need to buy another BEC?
-
How do I connect the servos to the Orange Cube? They have their own connectors for the original flight controller, I’m assuming it needs to be connected to the Main Out/Aux out on the Cube Orange? But what about the wire connectors, are there different ones I can buy to solder on to the original wires?

That is the esc. S1, S2 and S3 are the pwm inputs. You will need to test to see which is which motor pwm input. The cube should come with the current sensor which also powers the cube. You need to replace the plugs with servo plugs and then plug them into the servo outputs on the cube. Use a separate bec to power the servo rail on the cube.
No offense but it doesn’t seem like you have much RC experience. I suggest you do a lot of reading starting with the entire cube manual.
1 Like
Yep. I’m a newb this is my 3rd or so post haha.

If you need a smaller mounting option for the Cube. Here is a 3d printable conversion plate.plate v1.stl (112.2 KB)
2 Likes
@Texzin Have you flown yet? I am having a heck of a time getting the yaw tuned properly. What are your yaw pids? Would be interested in the rest of your params as well.
Sorry, have not had the time to finish and maiden. I let you know when I get there.
1 Like
Successful transition maiden today. Just a quick flight to gather logs. I did see one strange yaw twitch after transitioning back to QLoiter. I can see the yaw in red and mag in blue. Can be seen around the 57sec mark in the video. Not sure what caused it however. BIN file HERE if anyone could shed some light on it I would appreciate it. Yaw seems to be tuned “good enough” but will try to get it better.


1 Like
This might be a silly assertion.
But in what direction was the wind coming from - Do you have weather vane turned on. If so - it’s supposed to yaw into the wind to make sure the hover motors have enough power left in the bank to maintain hover and are not washed out trying to hold a Yaw counter to the wind.
That may have been the cause. I will pay better attention to the wind direction if it happens again. Thanks
I have it tuned pretty well now. Still have the following I want to address.
- Smoother hover transition in auto modes (RTL)
- Higher rate of climb/descent in FBWB. There are times when I have full stick to gain altitude to clear trees etc where I would like to have a better margin.
- Loiter seems unstable upon takeoff. Possibly this is related to mag interference from motor current? I am unable to get CompassMot to initialize on any of my airframes. Seems if I take off in hover or stabilize and then switch it loiter it is better. Position hold in landing is rock solid so I know it is capable of good position hold in loiter.
- Want to increase the 1st stage descent speed but can’t seem to find that parameter.
- Figure out what the heck cause this flip during transition (see vid). I am guessing it was due to having a crosswind during transition. At least it recovered. BIN file HERE
- Find a way to get reliable video from my Herelink. Using a GoPro7 black but it only works if I set it to record in 1080. What a waste not using 4k.
- Want a pan/tilt to be able to focus on center of loiter position. I have a GoPro gimbal I am considering installing on the belly with some landing gear.
Video of flip and video of a full auto RTL landing. That part is working great but still want a faster first stage descent and smoother hover transition.


1 Like

1 Like
Hello techspy, I was wondering how your project is coming along and if you’ve resolved the controllability issues you were having. I recently bought this aircraft but mine is unflyable (I think the FC is whacked). I’m interested in the path you are taking but before I invest some major coin in the components you are using, I’d like to make sure all is working to your expectation and isn’t buggy.
I think I have provided pretty accurate info in this thread. It works, just could use a little more tuning.
hi techspy , do you think the parrot disco chuck will work on the Zmo Vtol ? how is the cube orange working , what dose the cube orange do to the zmo vtol ?
Thanks
Have you tested the distance range you get with the modified Herelink antennas ? The original antennas go for > 40 km