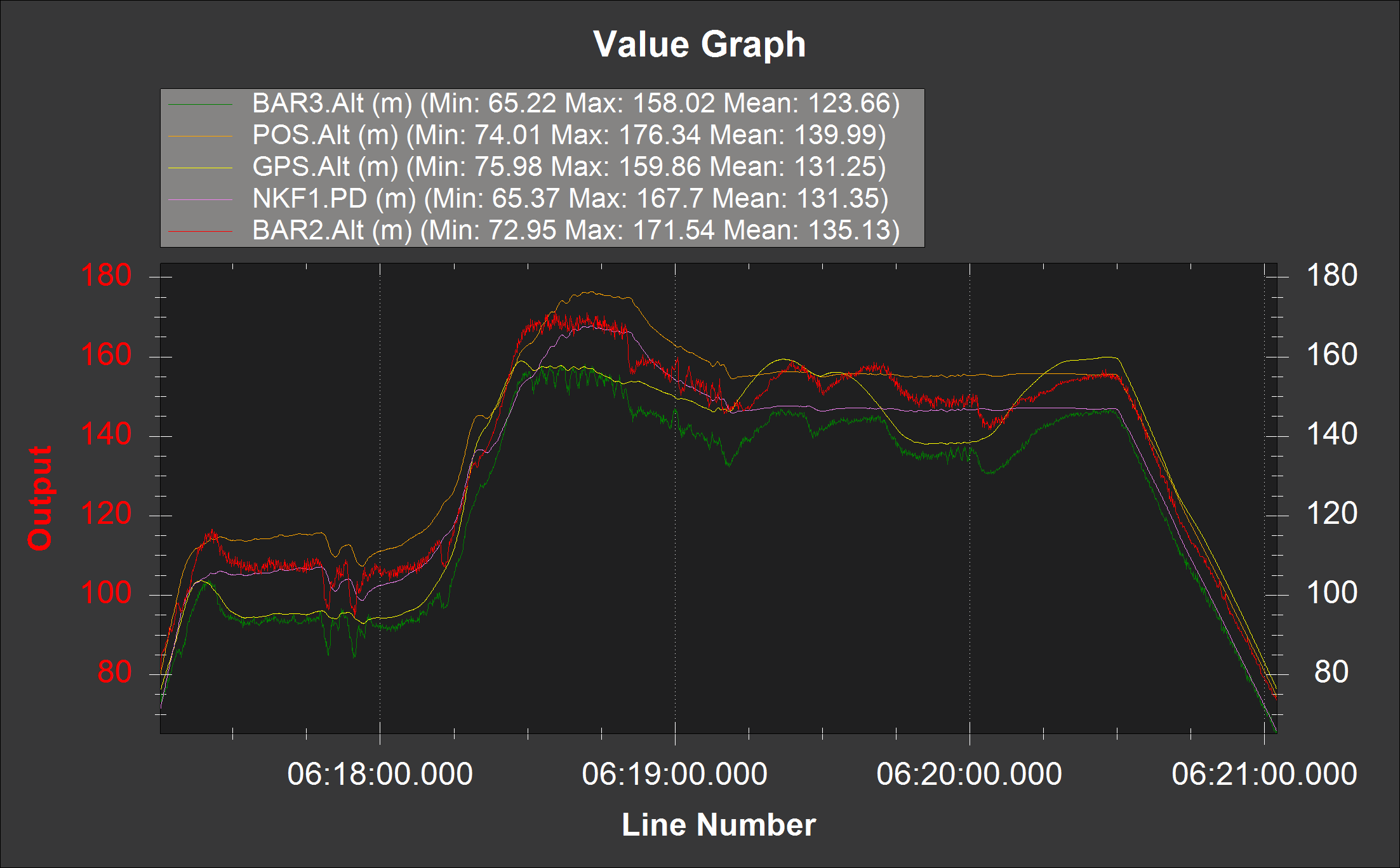
Hello, I’m trying to diagnose some weird altitude behavior. We have a very large hexarotor and we are seeing some odd behavior with the barometer altitude vs the GPS altitude vs the EKF altitude. Log is here
I’m not really sure what to start tweaking to correct this. We also have a secondary system with it’s own GPS that is showing the same altitude as the autopilot GPS.
An what is the strange behavior ? CTUN variables shows quite good alt numbers, except the fact that your copter is overweight and cannot cope with the desired climb rates even with 100% throttle.
~20m changes in altitude for both the barometer and GPS but the autopilot thinks it’s holding altitude. We also have external sensors that confirm the aircraft was indeed changing altitude about that much.
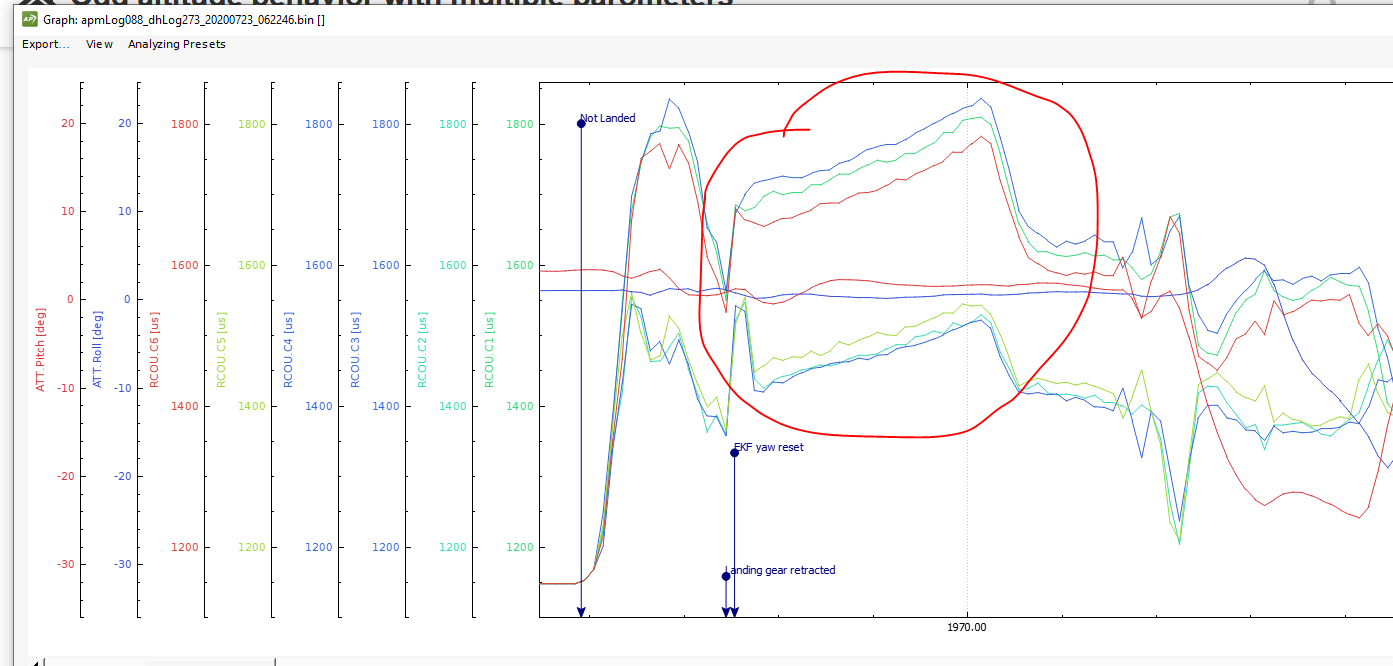
From the log, it seems that your copter has basic problems with motor angles. (What kind of frame it is ?)
Look at normal ascend how it struggles to keep yaw stable.
This plus the facts that it is underpowered (you lost a lots of power with the wrong motor angles as well) cause unpredictable alt hold behavior
Plus it seems that you have a custom build, at least I don’t know about official version of 3.6.12.1 …
We are using a custom frame and custom mixer (hence the 3.6.12.1). The problem you found is known and not actually related to motor angles and is actually these T-Motor ESCs. Apparently when they get hot, they sometimes decide to change their endpoints. I’m working on that problem as well, but that’s not what’s causing the weirdness with the altitude controller.