Octocopter ran great for many flights, all of a sudden today we had a violent crash. Orange Cube. Any insights are greatly appreciate. Trying to figure out which hardware parts might still be salvageable, don’t know what to trust. I did the best I could to try to “review the log” but I honestly don’t know where to begin or what to look for that might help determine the possible cause of the crash. If you figure out what might have happened could you tell what messages I should have known to look at, Thanks : )
The bin file for the flight should available at the link below but I’m not sure this is the proper way to share the file…
We had plenty of power, I think we shut battery monitoring off because we couldn’t get the Orange Cube monitor settings to allow us to arm the octo. We use a battery alarm instead.
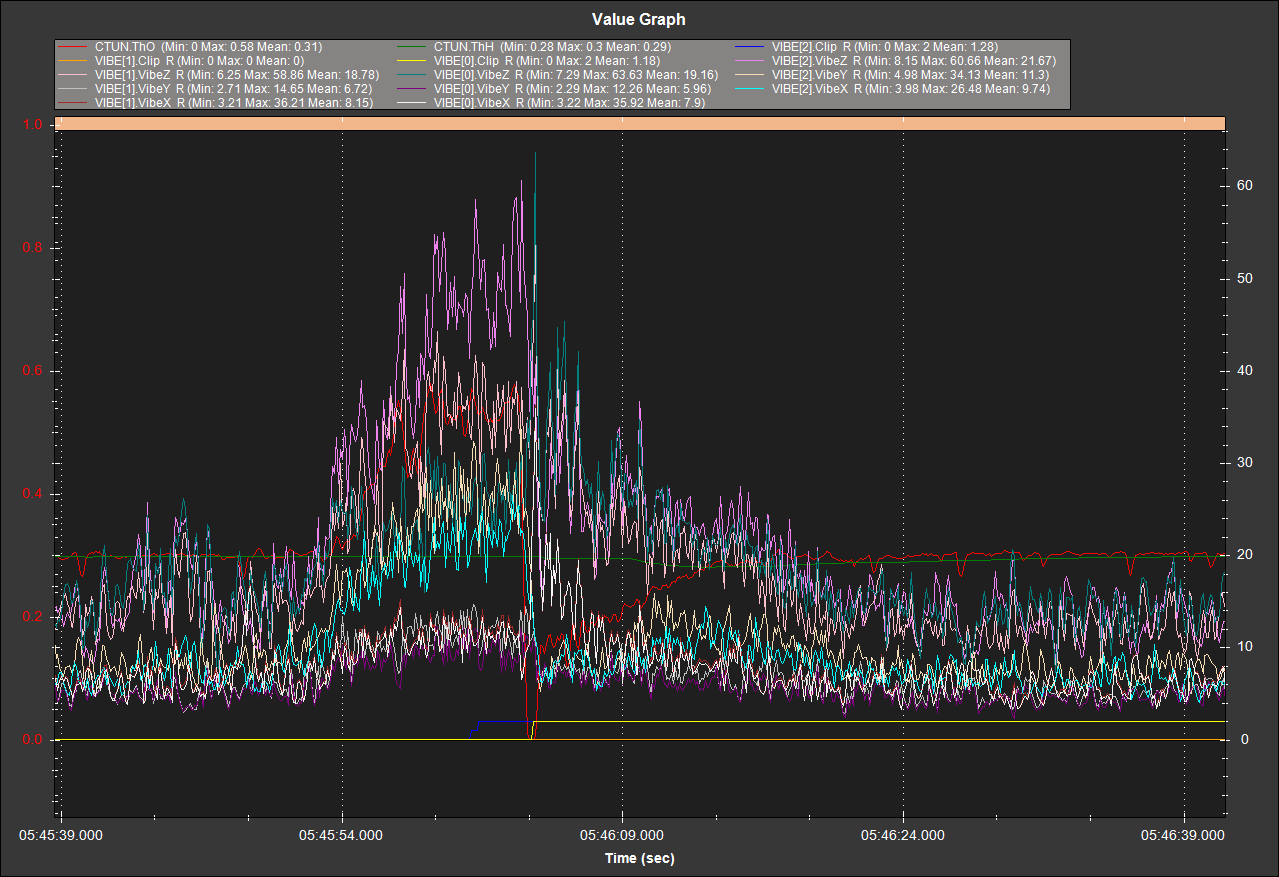
Vibration, Ughhhh, had no clue, appreciate the advice. We used double sided foam tape to mount the FC and based on your recommended readings that will get fixed on our second octo.
We have two Tarot Octos for High School Technology projects and figured we needed to know what to expect when Autotune was enabled. Roll and Pitch tuning went well in successful previous flights, the crash occurred when we were bring the octo home after what we thought was successful Yaw tuning. We couldn’t have been much more than 100 ft from home when the octo spasmed crazy hard and smashed and ruined just about every appendage. We can’t afford to ruin the second octo, it’s grounded until… I’m not sure, our confidence is totally rattled. We’ve flown at least 6 other models with Arducopter and various FC’s, mostly Pixhawks, but all of our previous issues were obvious pilot issues, never a reason to look into logs, Arducopter has been great!
Shutting the battery monitor of will kill PID voltage scaling, and that is a bad thing.
Never turn of the failsafes, nor turn off voltage monitoring. Period!
Lua script enabled, autotune happened at the same time. overloading the FCU processor could be the cause. There are about 95 ‘hello world’ within 1 sec.
also, your initial parameters are mixed with 10" and 14" propeller values. The quick tune is not done yet.
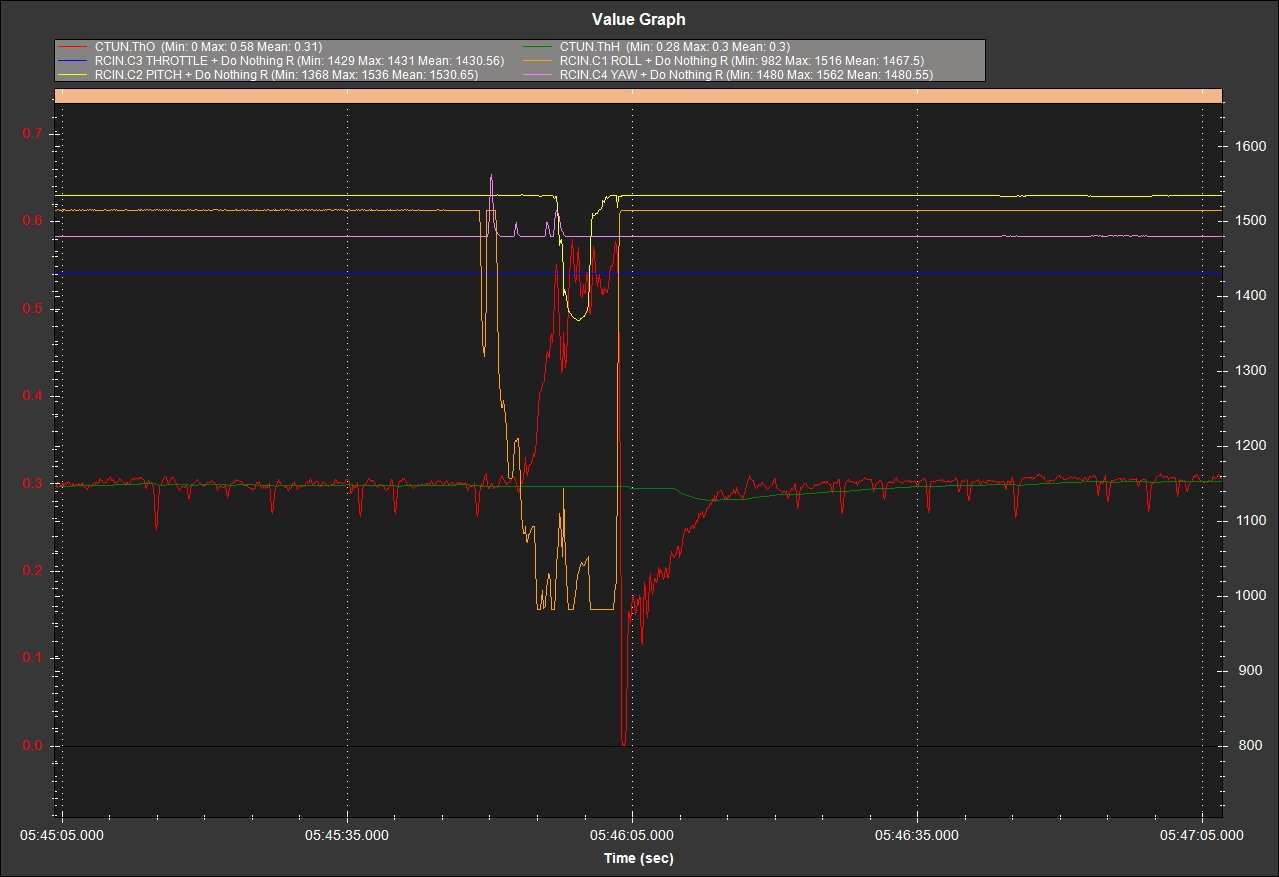
You may also want to go deeper into why when you roll + pitch, your drone propulsion seems unstable. potentially due to high vibrations.
With respect to the Lua Script overloading the FCU processer, . . .
How are you monitoring processor use during a flight with telemetry?
How do you determine how much of the system resources can be allocated to Lua scripts?
Is the consensus that the scripts were using too much of the system resources for the FCU to perform, the vibrations were so great that the cube could not determine its position, or are there other options to explore to determine what actually caused the flight and how to make adjustments?
I don’t see any evidence of System Resources overloaded. Look at the PM messages in the log. Disable the script anyway, it’s a major pain in the ass to review the log with the flood.
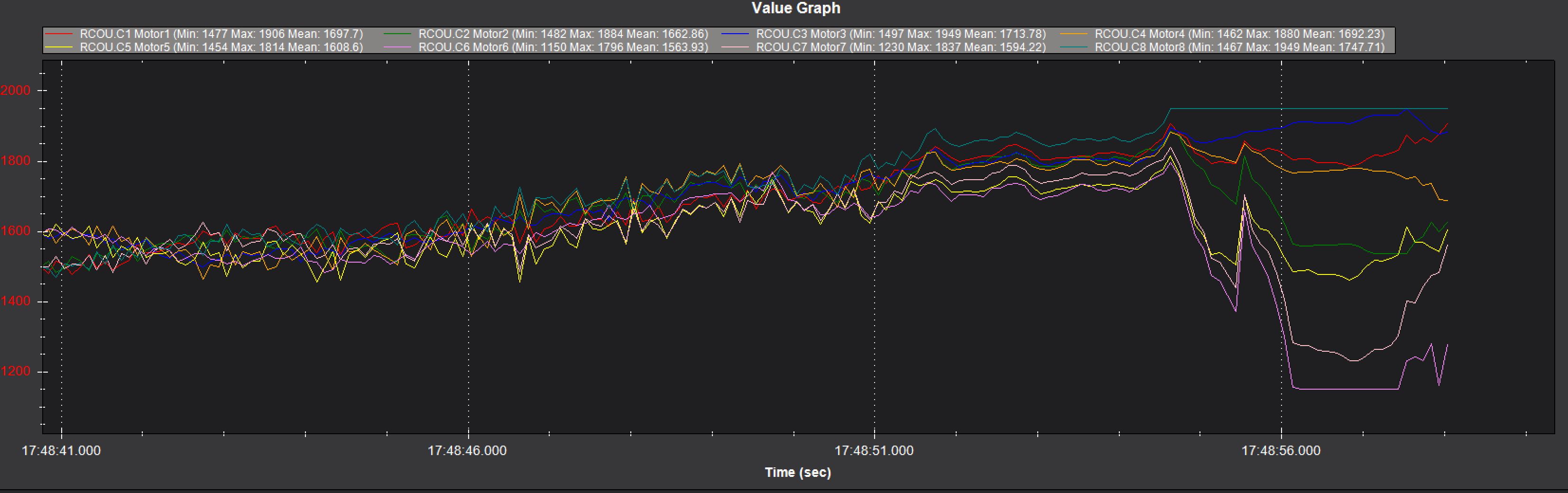
I see loss of thrust on Motor 8 and an untuned craft on default parameters. And you need voltage monitoring at a minimum.
No doubt about the sources of lots of problems. Here’s the thing, we have built a variety of at least 8 arducopter quads, all great, so much so that we felt confident investing in two octo builds. This octo was not a new build it flew many successful flights so many that we were confident to experiment, like add a Lua script and additional PID tuning. It a experienced a violent spasm and crashed to pieces.
What I haven’t mentioned is that an old quad that hasn’t been flown in a year but flew well prior to that was also recently brought out and it too had a what we think was a similar violent spasm but corrected itself and landed without damage. Strange, old logs were still on the SD card but no recent logs, no log of the spasm. We should have grounded our whole fleet until we identified the source of that spasm and it hasn’t been flown since but we didn’t and disaster struck now we are questioning everything about the quality of our builds and understanding of the instructions.
Vibration has been mentioned several times in the replies, got it, now we’re think vibration wasn’t a problem but over time if vibration is cumulative, our bad, we got that and the fix is in the works. But is that all?
10" and 14" mixed initial prop value instructions are a mystery to us, how did we manage that (?). we did it before and after to all of the rest of the setup steps to be on the safe side :
You have to set some parameters based on battery and prop size for a new copter setup.
Please make sure that before entering data here and updating parameters:
– ALL INITIAL SETUPS ARE DONE (Calibrations, frame settings, motor tests)
– BATTERY VOLTAGE MONITORING IS SET AND WORKING
Note: INS_GYRO_FILTER with a value other than 20 is optional and probably only for small frames/props. At first, you can keep it at 20
The crashed octo has an Orange Cube which is new to us, previous models were all Pixhawks, our power experience was similar to the following and we gave up, our bad again, it wouldn’t arm so we shut off the monitor and flew with an alarm:
We’ll shut off Lua, that was a bust anyway. We still don’t know if we should trust any of our builds now and our whole fleet is grounded because our confidence is shot. We should have dug deeper into the quad that spasmed and that’s kind of where we are at but what to do? Why don’t logs work, is Pixhawk Tlog only, why no bin file? When should we do the initial parameters? What does un-configured vehicle mean, isn’t that setup or is configure something else? Ughhhh, how were we successful before but now spasms on two models…
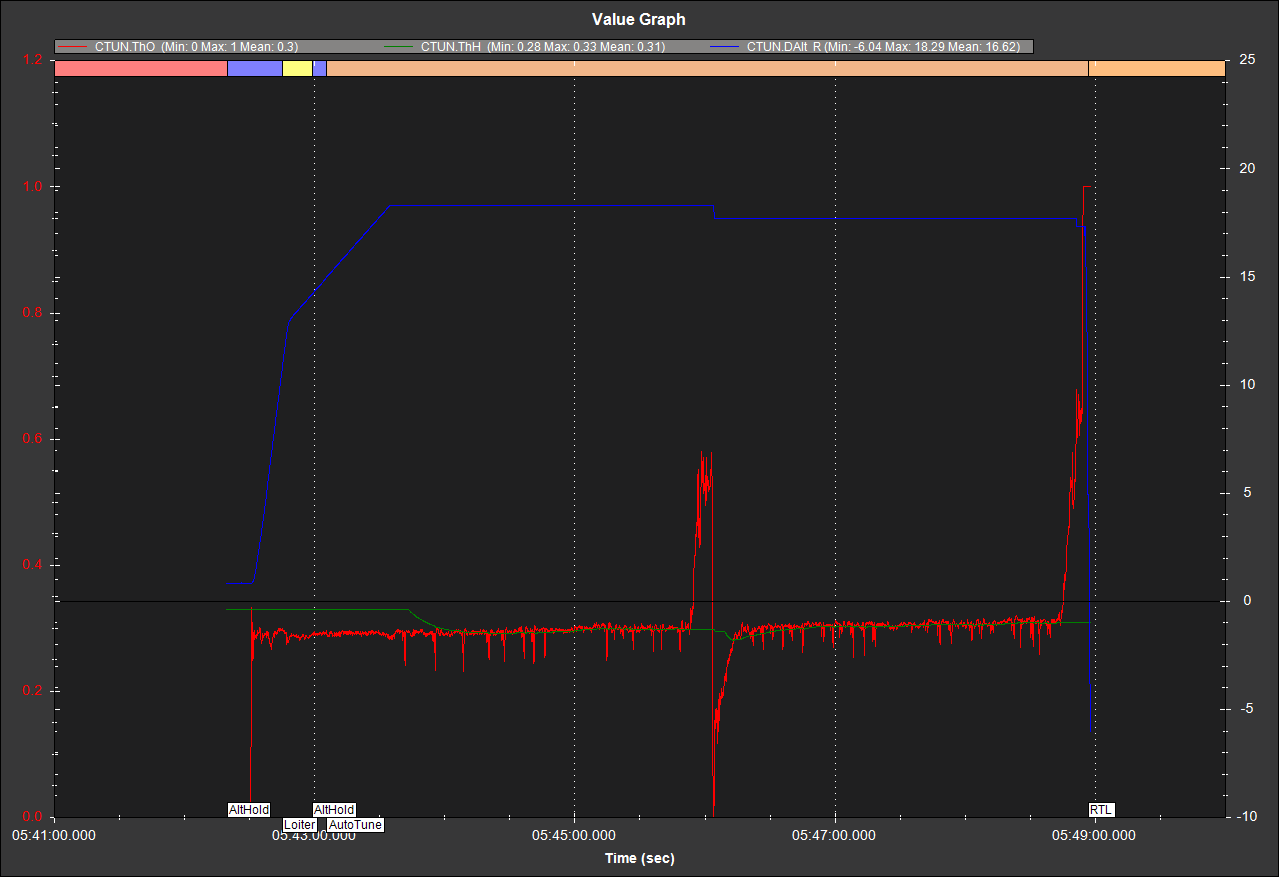
Sorry for my rant, I’ll try to be more specific, does anyone have any insight that might explain the cause of the giant spike in roll that resulted in the crash:
It means you did not configured the vehicle according to the ArduPilot documentation nor according to the ArduPilot Methodic configurator sequence.
The ArduPilot documentation presents you with lots of options, and lots of possible sequences, and lots of choices. Currently contains around 800 documents.
The ArduPilot Methodic configurator presents you with less options, and a single linear easy-to-follow sequence. A single document automated by the Ardupilot Methodic configurator software
Are you still talking about the same flight? Did you look at the RCout graph posted above? And you are wondering why it rolled? Motor 8 was commanded to max, 5.6 & 7 dropped to attempt to Stabilize, now there is a general lack of thrust and it’s not Stable. Down it goes.
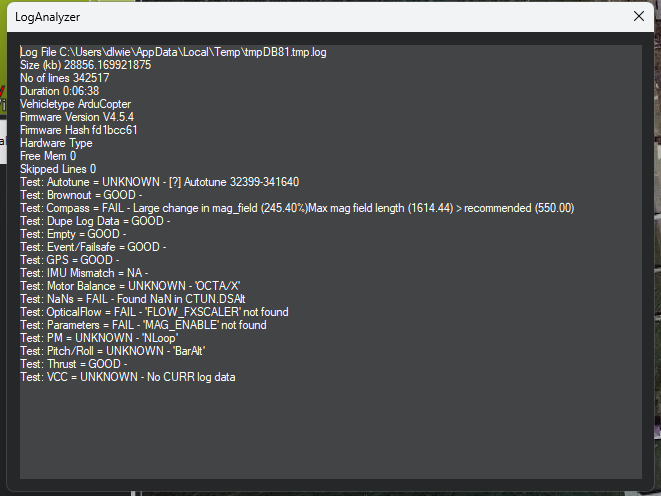
The Log Analyzer is nonsense. It hasn’t been up to date or useful for many years. Do you wonder why it says “MAG_ENABLE not found”? Because that parameter hasn’t existed in Arducopter for years.
Dave, In your RCout post you commented that you saw a loss of thrust on Motor 8. I looked at the plot and saw Motor 8 maxed out… Ughhh, disconnect in my head, maxed out to me meant max thrust so I regrettably dismissed your comment. Regardless, I had no idea that the plot also showed that 5, 6 and 7 attempted to compensate.
What might be the most likely cause of the command for Motor 8 to max?
You guys are great, this is a remarkable endeavor, I can’t resist all that I’m learning about the complexities of copters that I never could have imagined. The crash heightened my awareness of my ignorance about all aspects of my builds and configurations.
I’m also thinking that you guys don’t seem to mind trying to straighten out those us in the dark if we just ask. I have another perplexing state of uncertainty…
I didn’t and don’t get the RCout plot that Dave shared in the forum. Motor 8 maxed out but lost thrust, say what(?). PWM signals range from about 1000 usec and 2000 usec, for motor 8 on the plot why would maxed out be no thrust??? Doesn’t matter but Motor 8 is on the opposite side of the octo as motors 5, 6 and 7 and if motor 8 lost thrust wouldn’t increase in thrust on the opposite side make it worse? Or if motor 8 maxed out on thrust, like my intuition led me to believe, and motors 5, 6, and 7 lost thrust that would have made it equally worse? What am I missing here?