I can’t figure out what is preventing my machine from arming and ask if someone can take a look at a log and the parameter files?
My setup is a Quad with an Orange cube, Kore board and Herelink running Copter V4.1.0 Beta5. I still get the same issue with Copter 4.0. There is a message saying Battery1 is below Arming Voltage, but I have disarmed that check and it still won’t arm. The ESC’s also beep at about 1 second intervals and I can’t do a motor check. They are T-Motor Alpha ESC’s which don’t need calibrating.
Are you sure you want to be on ArduCopter V4.1.0-beta5 ?
Was this whole setup working before, and now it’s not?
You current monitor settings look wrong and should be:
BATT_AMP_PERVOLT,50
BATT_AMP_OFFSET,0.45
You battery voltage settings and actual battery voltage look OK, so not sure why it’s saying
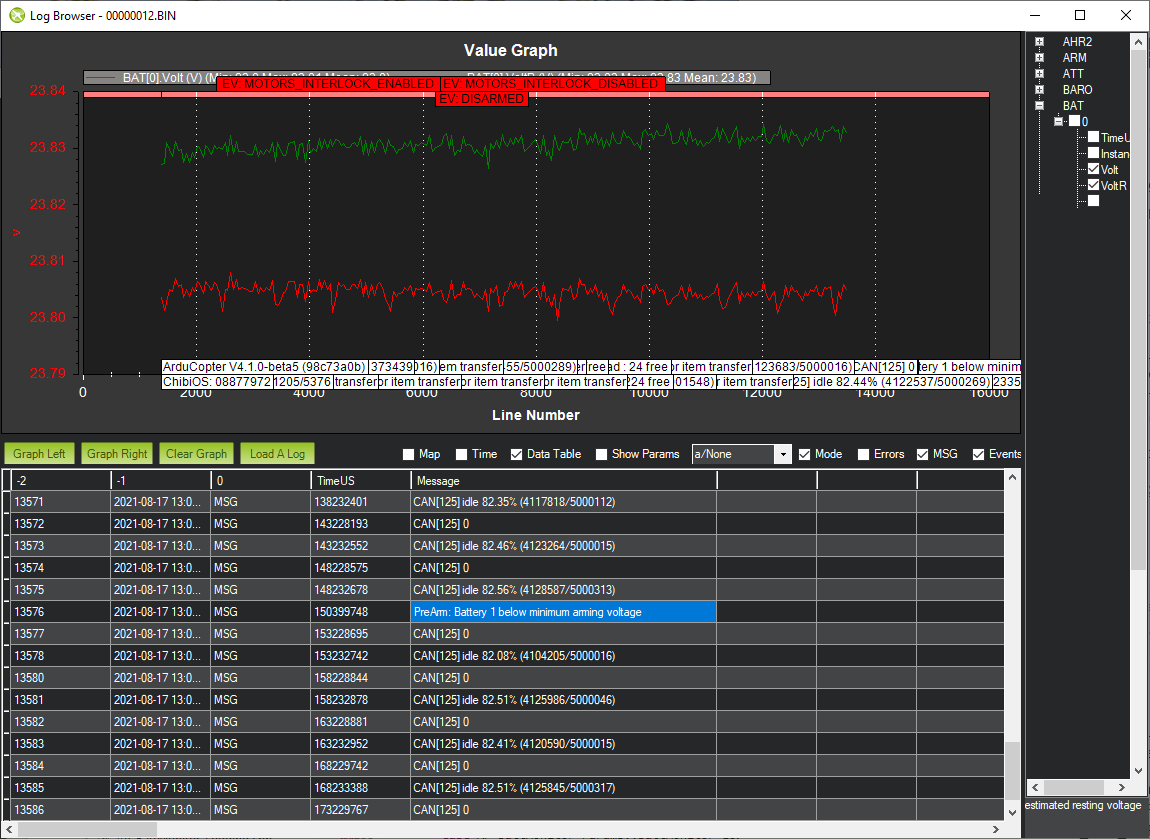
“PreArm: Battery 1 below minimum arming voltage”
I’d suggest setting these :
LOG_DISARMED = 1
MOT_THST_EXPO,0.2
MOT_PWM_MIN,1100
MOT_PWM_MAX,1940
and lets see how it goes then.
And something is complaining
“Need mavlink2 for item transfer”
so you might need to set
SERIAL2_PROTOCOL,2
but I’m not sure what is connected to serial 2, it’s the only port set to Mavlink1
Breaking News
The latest Alpha ESCs have something going on if powered on with or without any PWM signal to begin with - I’m not exactly certain now…
You already have
MOT_SAFE_DISARM,0
so try setting
MOT_SAFE_DISARM,1
so the ESCs will get no PWM at all until the FC is armed
and definitely set these (as mentioned before)
MOT_PWM_MIN,1100
MOT_PWM_MAX,1940
The other params involved are
BRD_SAFETYENABLE,0
BRD_SAFETYOPTION,3 <- probably set this to 0
BRD_SAFETY_MASK,16368 <- already looks correct
and just maybe…
BRD_BOOT_DELAY,5000
in case the ESCs are unhappy about waiting for a signal and give up before the FC finishes booting. See if you can go a bit lower, like 3000, and still reliably find CAN devices.
Leave all the Servo PWM max and min settings as per standard, and just set these two in relation to the ESC PWM’s:
MOT_PWM_MIN,1100
MOT_PWM_MAX,1940
obviously all other calibrations and initial settings should be done as per normal.
Stick with 4.0.7 stable release.
How important and expensive is this whole build? You might want to seriously consider different ESCs
The pre-arm error, “Battery 1 below minimum arming voltage” must be because the battery voltage is below the BATT_ARM_VOLT parameter values of 22.1. When we look at the voltages though they look higher than this limit so I’ll investigate a bit further to ensure it is working.
My immediate guess is that it is a timing thing. So perhaps the battery voltage has dipped for a moment and triggered the pre-arm check but we can’t see this in the 10hz log data. This seems a bit unlikely though but I’m pretty sure that if you set BATT_ARM_VOLT to zero it will arm so this might be a short-term workaround at least.
Thanks for your reply and I have tried setting BATT_ARM_VOLT to zero and again no luck. I suspect it could have be something to do with the ESCs as they just sit there beeping. I have tested a motor with a servo tester and get the same result and no spin.
Hi Shawn
Its quite a biggish build and the motors are U8II Kv190 with integrated Alpha ESCs. Looks like separate ESCs would have been a better move. I have some KDE motors which I might try then revisit the U8IIs.
At the moment they just beep about every second and it seems you need an App to reset them?? Tried them with a servo tester with the same result.
A bit of a guess but the vehicle will disarm on the ground if any of the failsafes trigger or if the throttle is not raised before DISARM_DELAY seconds has passed.
I’ve had a chance to dig into the log a bit further and the “PreArm: Battery 1 below minimum arming voltage” is appearing after the vehicle has been disarmed and because LOG_DISARMED = 0 we cannot see what the battery voltage is. I’ve tested that the BATT_ARM_VOLT parameter is working correctly.
I suspect this is all old uninteresting news but this item was on the 4.1 issues list so I investigated and now I’ll close the issue. Hopefully that’s OK with everyone.