Hello, i’m playing with the benewake TF mini lidar trying to use it as a front proximity sensor.
I have managed to read correct values in sonar range after upgrading the TF mini firmware.
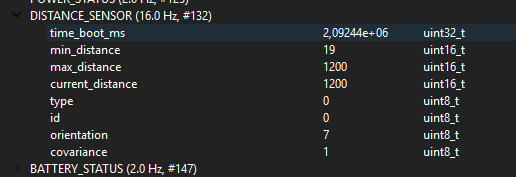
All the rangefinder parameter looks good.
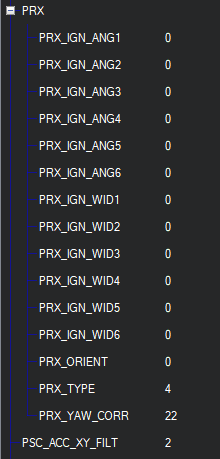
I also used prx_type = 4 (rangefinder).
I thought i would be alble to see the distance message on mission planner or in the radar window but the only thing i get is PreArm: check proximity sensor
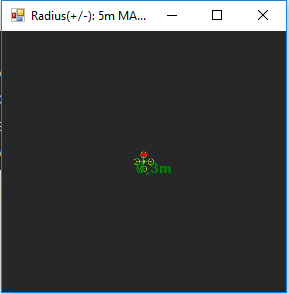
Nothing appears in the radar of course, as expected.
Am i missing something?
Thanks in advance.
I’m using AC 3.5.2 by the way.
Another thing,
i just looked at the code on AP_Arming.cpp,
i see that if the distance is lower than 0.6 i would expect to sse a pream message:
if (distance <= 0.6f) {
if (display_failure) {
gcs().send_text(MAV_SEVERITY_CRITICAL, “PreArm: Proximity %d deg, %4.2fm”, (int)angle_deg, (double)distance);
}
But I just put the copter next to a wall at 0.4 meters (using radar view) and i can still arm the motors.
Another thing, is sonar range value is 0 now (not updating anymore), but i believe this can be normal.
@ppoirier
i did it, but still can arm it when i’m less than 0.6m and i saw only one time the message PreArm: Proximity %d deg, %4.2fm", (int)angle_deg, (double)distance)
There is no information that the obstacle avoidance is active.
Yeah it was like this before and has been removed because of to many complain about this ‘‘weird screen’’… from people not using the feature, but the wiki being outdated it creates lots of confusion (read frustration)
Hello everyone
this is my first post , im glad to meet you
on the topic now . i have a TFmini with corect conections and setings and i cant get it to report distance
on the pc software of bakenwake i can see the distance displayed but not on the pixhawk .
ps i want to use it for obstical avoidence