We made some progress on this. Now we have two diagrams:
- one for RATE_FF_ENAB = true
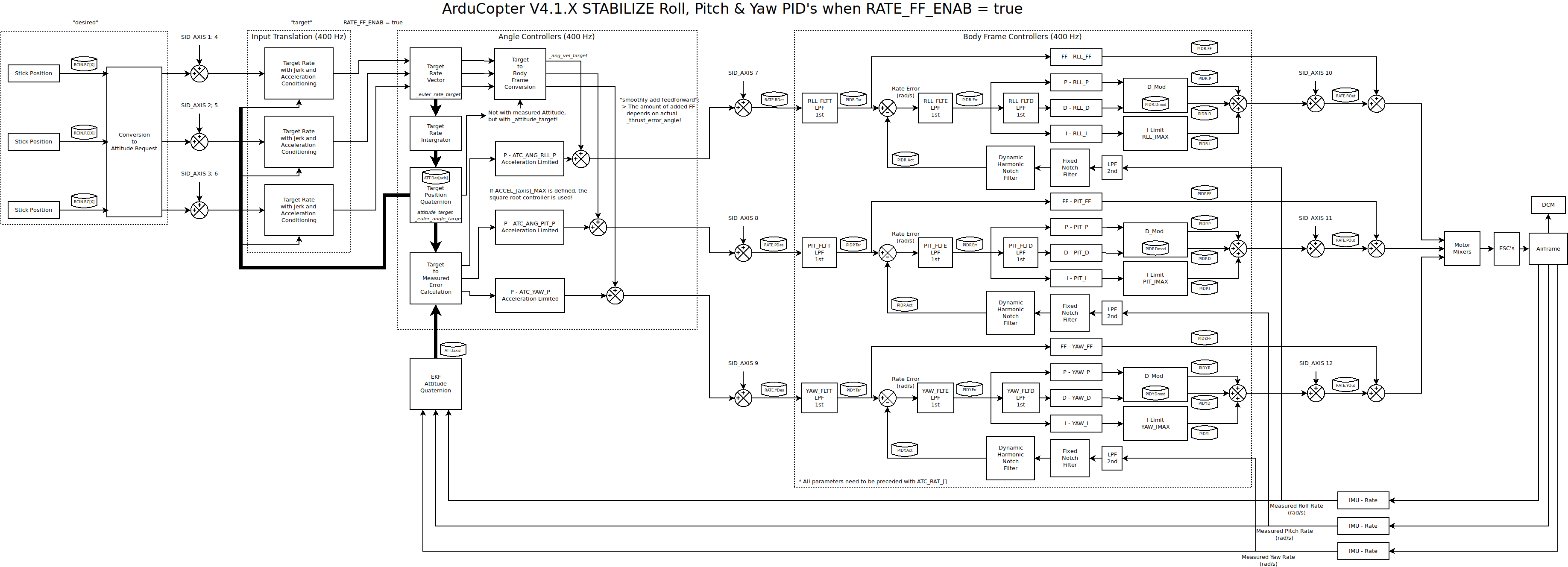
- and one for RATE_FF_ENAB = false.

We improved the variable names, and added many details. I will post updated matlab scripts soon.
We made some progress on this. Now we have two diagrams:
We improved the variable names, and added many details. I will post updated matlab scripts soon.