Hey Patrick @Patrik_Emilsson
Just wanted you to know that my orders for the new GPS and the RM3100 compasses have arrived today and will start working on the rebuild of the two machines tomorrow and get these new bits incorporated. Then we shall see if GPS glitch is a problem any further.
Exciting, I really hope that it will solve your issues. I have tried to add a second compass but failed due to that they have the same id on the i2c bus and it can’t be changed.
I had two flights today without issues, have not yet looked through the log though. Added dynamic notch filter yesterday and it seem to have done something really good to my aircraft.
If you get issue with installation of the GPS, try to turn off automatic setup in the fc configuration.
2020-09-09 M9N_3.txt (19.2 KB)
This is the config file I used with my Drotek GPS, applied with the Ublox control center.
With mission planner you can configure your flightcontroller USB port to direct connect to the GPS and then connect the Ublox control center through the flight controller.
Thanks Patrick
Whats this dynamic notch thing. IS that the notch tuning thing that @andyp1per worked on or something different.
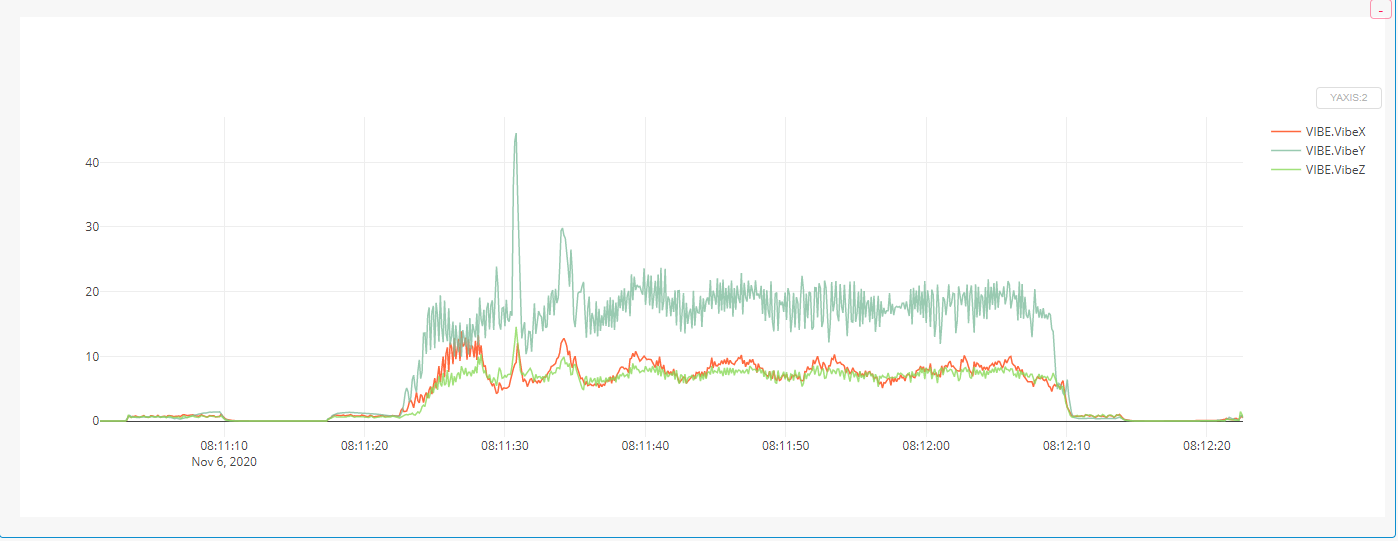
Yes that’s it, I need to have more flights to see the long term behavior but so far so good. But I had no in flight GPS glitches or compass variance errors. Was pushing it as much as I could, was pretty windy, and had peek values of vibration around 30 and still no errors.
It’s almost funny to see how similar some of our issues are, today I had SD card errors, first time happened a few weeks ago and had it a couple of time since then. I’m not sure but it looks like it happens when I have left a few (~10) older logs on the card. Will put a new card in and see if that helps.
So I am confused. So I have the notch filter setup pretty well on both the quad and hex. I have vibrations less then 20 and in most cases less then 15. Glitches with the second GPS seem to have resolved that but vibration compensation has killed the machines twice now. Yet even with higher vibes your not getting the compensation kicking in. Strange.
As for the SD card, ya that’s odd and a new problem. I replaced each card with a newly formatted card and that appears to solve it for now.
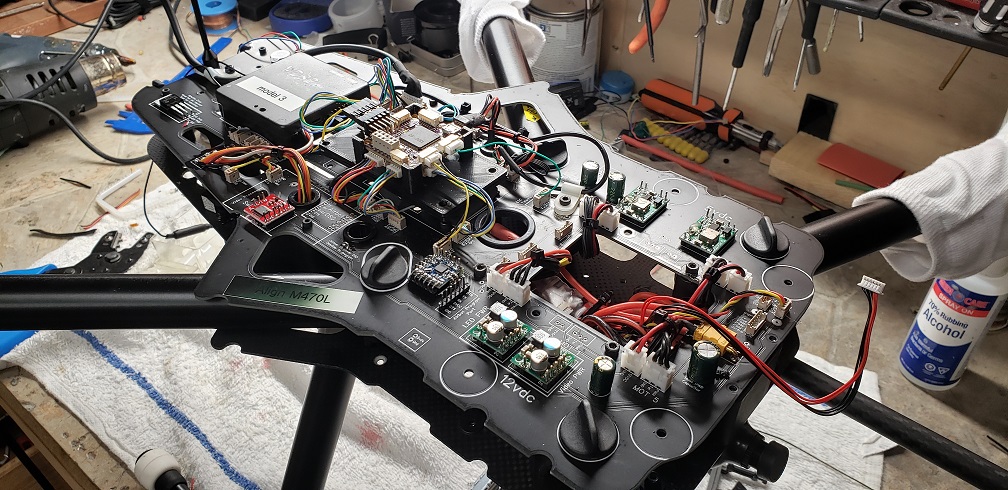
Right now both the hex and quad are on the bench. I have 3d printed TPU motor dampers for all the motors. New DuBro foam for the FC and going to tweak the ESC PWM speed because it is supposed to make the motors run smoother. Also the RM3100 incase as you pointed out its a compass issue causing the glitches…
It’s all frustrating yet fun at the same time.
Rebuild of the quad is nearly done. Couple things left to do then calibrate and see if she flies.
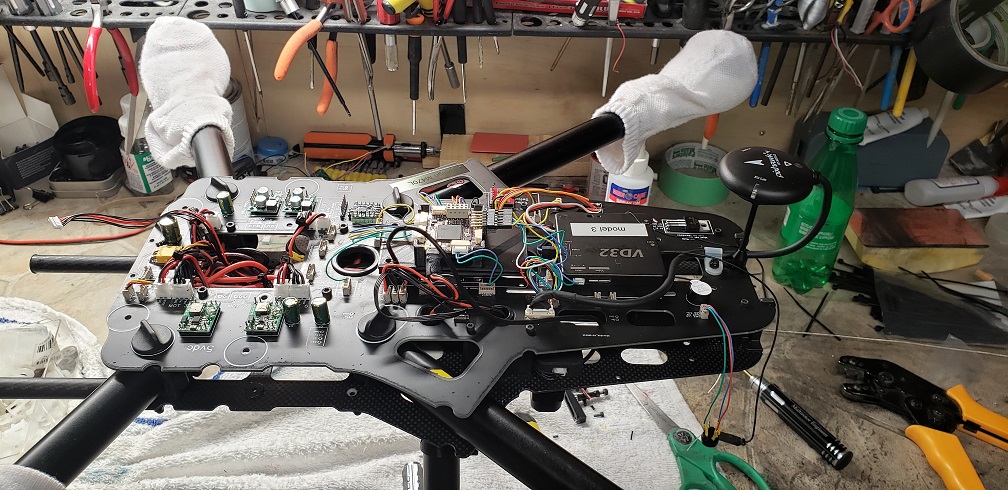
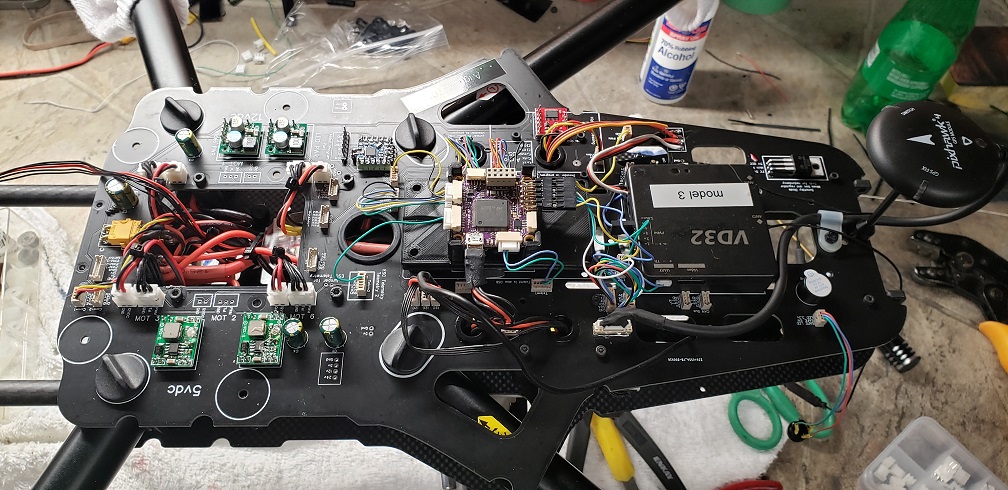

The hexa s next just waiting on the lidar
2 Likes
WOW wow wow, that custom board looks amazing 
If I was a drone and I knew that if I crash, I shall end up like Robo-Cop, not sure I wouldn’t take a dive 
Beautiful job @rickyg32
Impressing!, I really hope it will perform in par with its look. Will be very interesting to see how the new compass works
I had a successful flight today, cold weather and no wind. No glitches, compass variance peaked at 0.4 so I guess it could have been better, continue tweaking…
I wrote in another thread, but I forgot in which, so I’ll add it here as well.
Since the advent of concurrent GPS + Glonass in M8N, the 25x25mm ceramic patch antenna won’t do anymore. While it was perfect for single-constellation receiving (LEA-6, NEO-6, NEO-7), it lacks the bandwidth for GNSS, and that’s the source of GPS glitches.
Of course the M8N can be setup to work with a subpar antenna - the SAM-M8Q is factory-released with a tiny 15x15mm patch - and not glitch, but I lack the knowledge base on uBlox settings, so I went for a better antenna.
Today, if you’re happy with a M8N, the best option is the DJI Inspire2 GPS spare part. It’s priced incredibly low, at around US$65. And off the 8-pin connector, the first 4 are a clean serial 5v-tx-rx-gnd so no hacking needed. And I say it’s priced low because just the bare antenna, without the GPS receiver retails at US$60 in electronics stores like digikey or farnell.
Otherwise, if you’re sharp with the soldering iron, any A2 or A3 unit can be converted, and they come with plastic enclosure and mag. I even think A3 GPS can be reprogrammed to our CAN standard and get GPS + mag + RGB led in one neat case.
Hey there Paul.
Glad to hear your getting some successful flights. I am curious how you measured the compass variance. Now that I have the RM3100 I am curious to learn more on that subject.
@ThePara
Thanks ever so much for the information. I think I saw your post on the DJI compass earlier this year. Very interesting. My larger drones all use the larger GNSS GPS with the large antenna. They work great. My smaller hex and quad don’t really have a place to put a large GPS.
Also the larger GPS need even larger cases and that just don’t work on these drones.
But I will check out the DJI gps.
Thanks again.
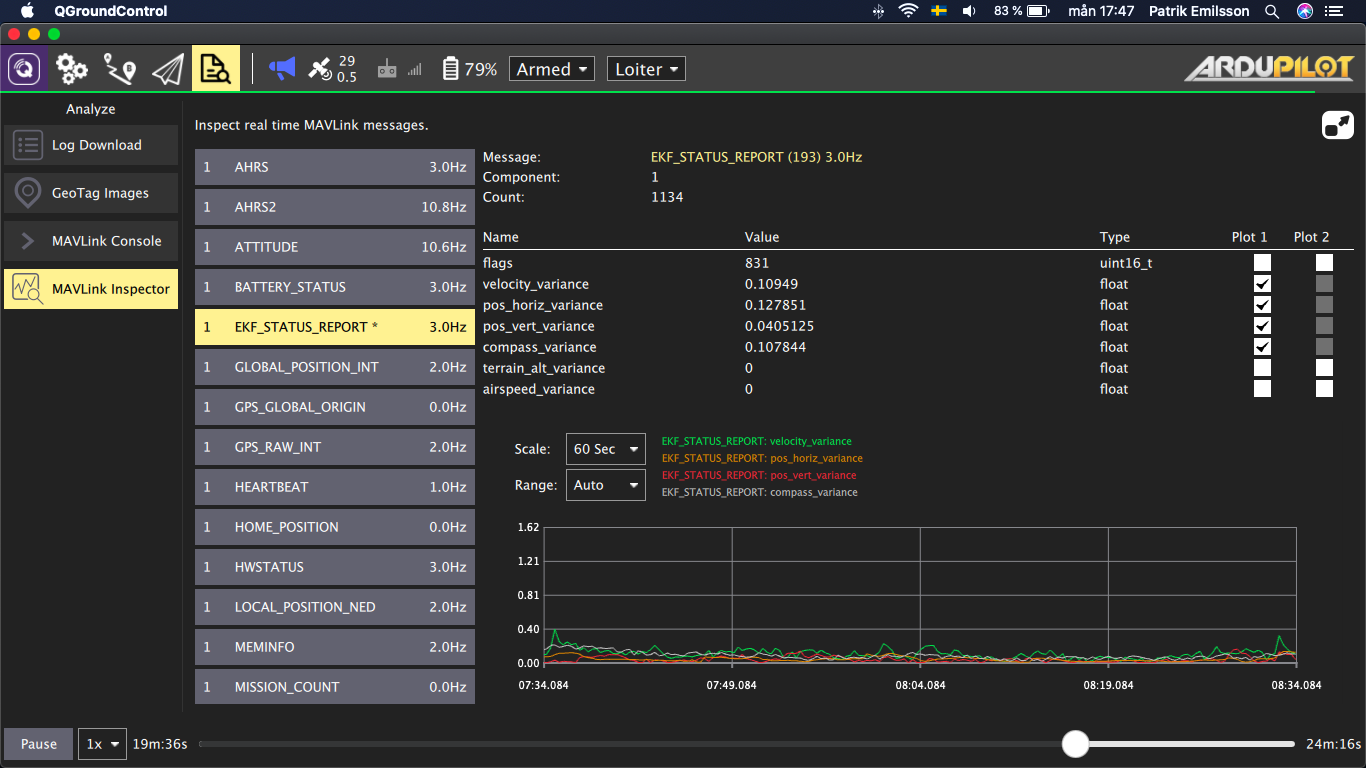
Hi Rick, I just realised that the question concerning compass variance maybe was directed to me?
Anyhow I’m getting the info from the .tlog log file when using QGroundControl. In the “MAVLink Inspector” view EKF_STATUS_REPORT. There might be other ways to get this info but I just don’t know how. Adding a screenshot how it looks
Thanks for that Patrick. I will check it out once I have everything workign again.
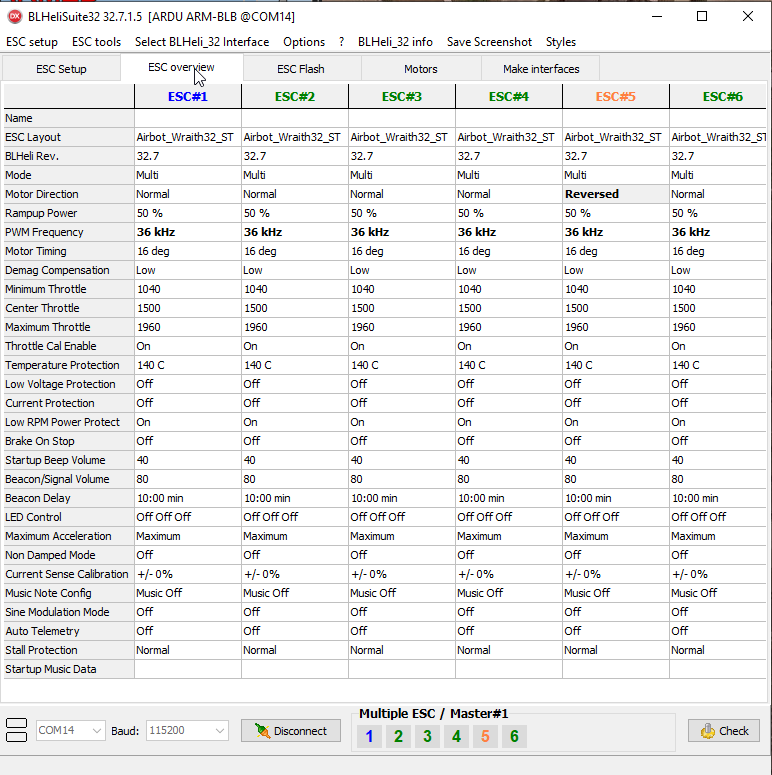
Right now I am nearly done the rebuild but for some reason I cant’ get ESC telemetry no matter what I do. It’s really odd, I got telemetry before. But not now.
There is nothing odd about the ESC config that I can find.
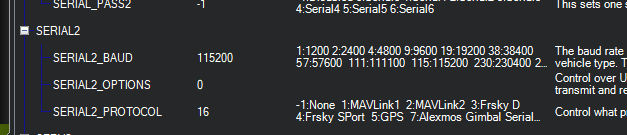
The port config is right.
IT hasn’t changed
I even connected a single ESC telemetry to the fc just to see if there was some issue with the way it was wired since its being done as part of the pc board I designed. But even directly connected I get no telemetry.
It can’t be the board as firstly I don’t have teh board in play with this last test and second the other quad works fine.
It’s really odd.
Well I got the telemetry working today. Turned out that the TX port in the documentation I was reading was incorrect. I moved the pin and I have telemetry.
Oh and the protocol is 16.
However I still have one weird thing.
I have 8 esc now on a hexa which is weird. I think esc 3 and 4 are being duplicated somehow.
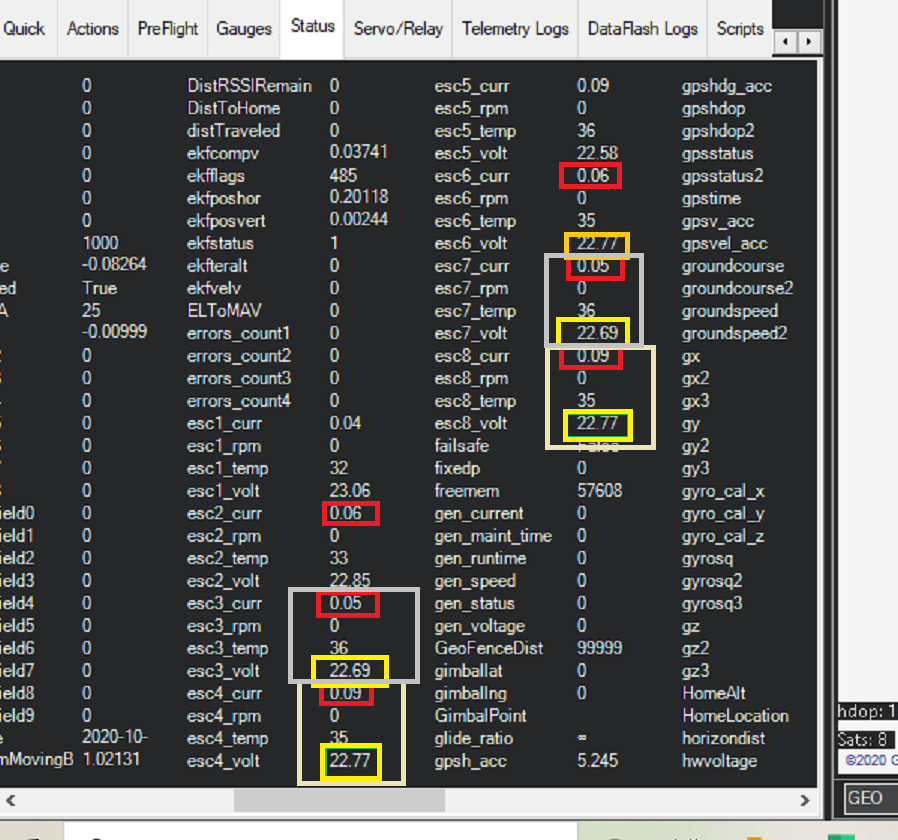
Not seen that before.
Well it’s strange but it’s reporting correctly in the logs so I am happy.
Just wanted to pass on my thanks for some of the information here. It’s been a big help. I’ve been fighting an F450 with a Matek F405 controller on it. It tuned in well and seemed to fly well in the hover but when I started moving around too aggressively I would get EKF errors, EKF Failsafes, vibration compensation and GPS glitches. Good fun… Thank goodness for basic Stabilized mode…
So I’ve narrowed it down to some vibration issues and cleaned that up. But I also checked the compass noise.
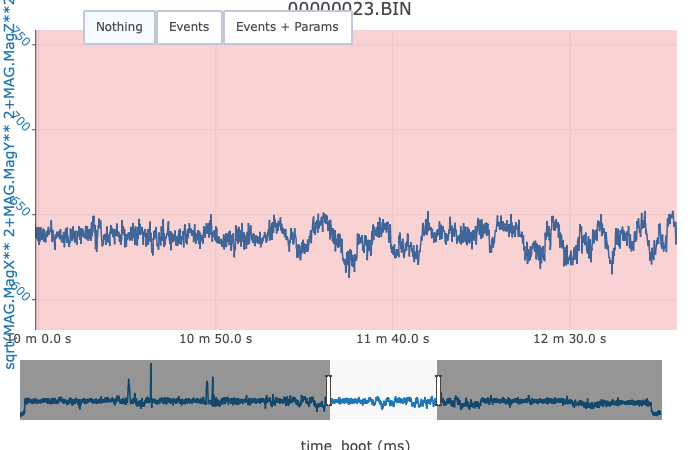
The compass noise was significant and I think a source of some of the problems.
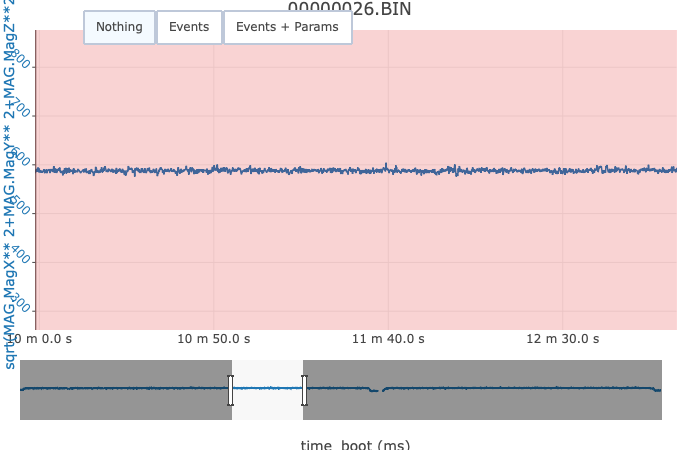
I added in a filter capacitor on the power leads and it’s night and day! Not only is the noise level steady, but it’s also lower.
So thanks for sharing your information here because it’s helped others along the way.
Power leads to the ESCs? Or Power leads to the compass?
On the main power leads to the board, but I’m using a F405-CTR. It has built-in current sensing and power distribution to the ESC as well as regulated supply to all the accessories (RX, Compass/GPS, VTX) So in my case the main input lead was the only place I could get the cap and still get all the ESCs.
I would think that if you were having this problem with a configuration with separate components, (ie: Pixhawk Cube) then I would put the filter cap on the supply to the ESCs. They’ll be the bulk of noise.