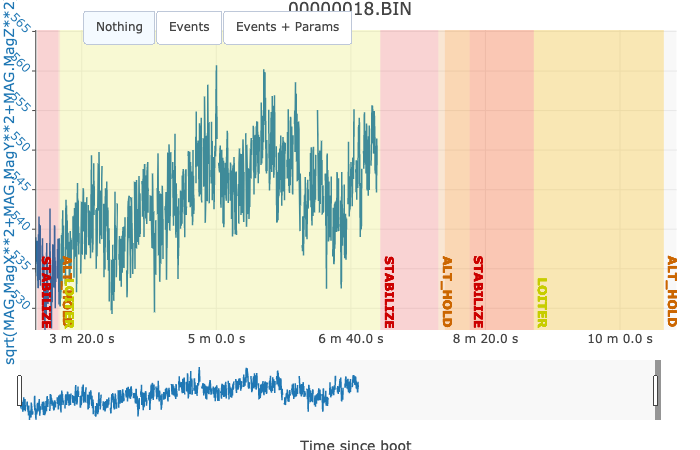
This is how mine look on the new GPS, the GPS coordinates by themself is ok but Compass is noisy
\ok I am lost.
I can see where to see the mag2 in the tool, but I don’t’ know how you got the square of them.
Also Mag 2…what the heck I should only be using the external GPS mounted compass…what the heck.
I tried setting the expression but that didn’t work
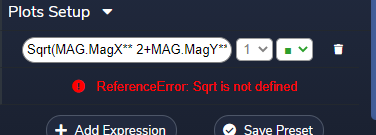
You were very close, it’s case sensitive and should be sqrt() no capital S
Read your configuration and from what I see it’s correct, the external compass is your primary compass.
Ok no capital.
Since I am rebuilding I will have a look at the compass as I should only be using one.
Thanks for the information and the education.
Noise is an interesting thought. I have noticed that the VCC on the flight controller looks like this.
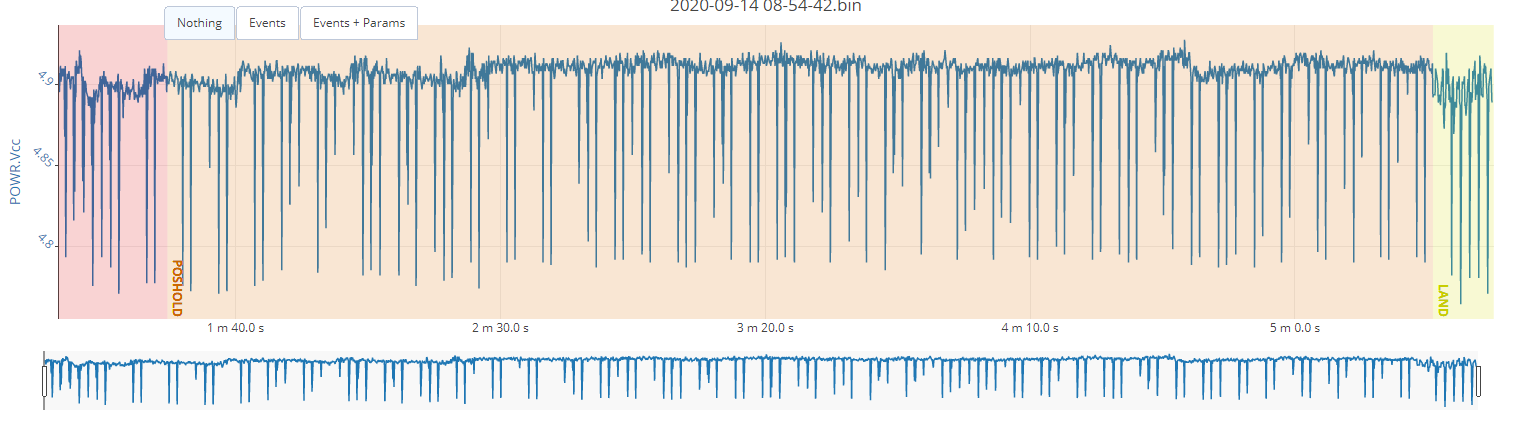
Not sure what I need to do to clean that up. I have a new module on it’s way and adding a bunch more capacitors into the system…but still not sure of the cure here.
So I tried again and really close now.
But still not the same as your graph
I have just learned to read this type of log and think yours looks very good, at least you don’t seem to have any interference from motor current.
If you change MAG to MAG2 in the formula you will see the other compass, that doesn’t look as good
Patrick I think your on to something with this compass stuff.
I dont’ know if Compassmot has any affect on this sort of thing.
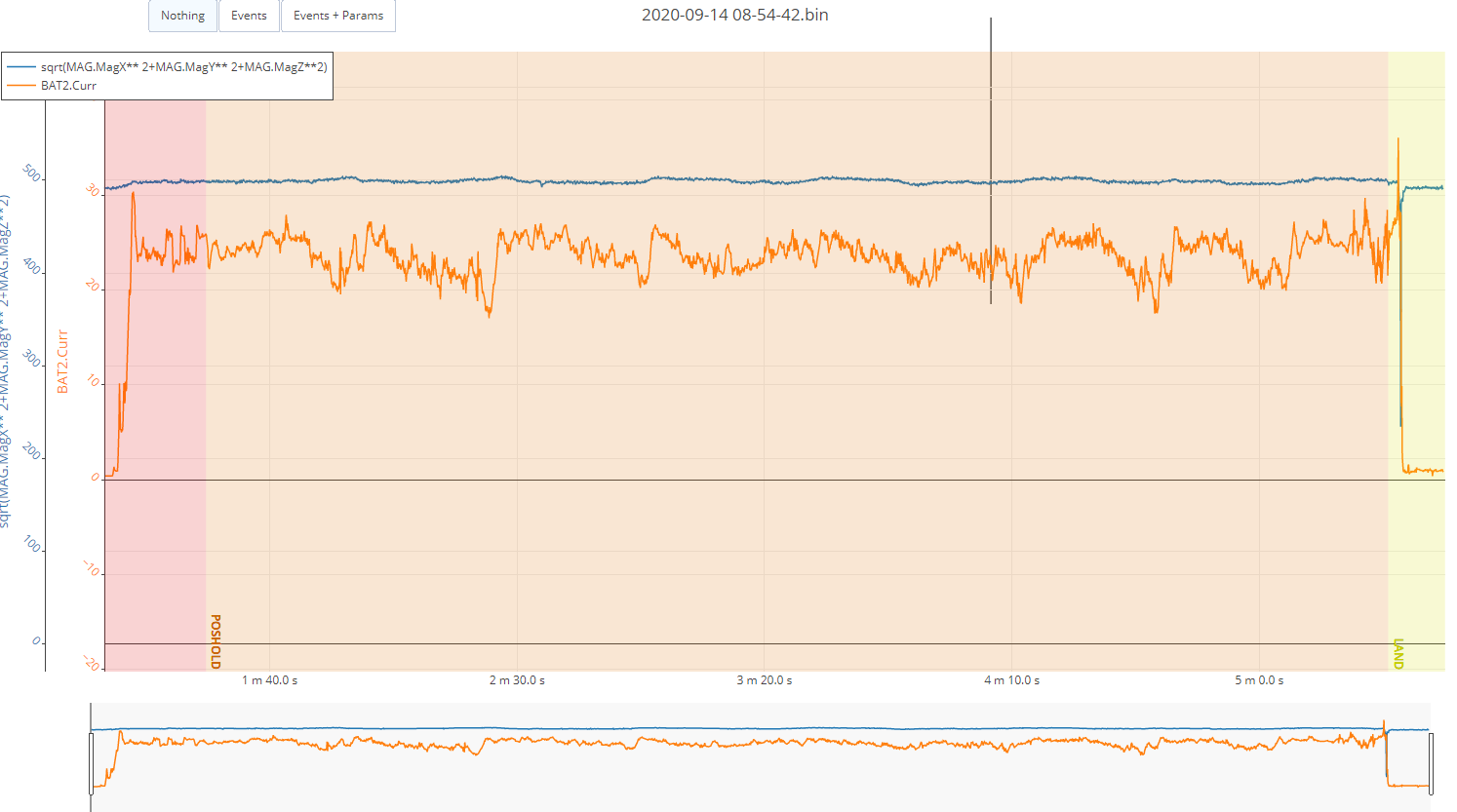
But in looking at the Mag2 as you showed me and watching the bat2 current I can’t help but think that there is interference from the motors and such.
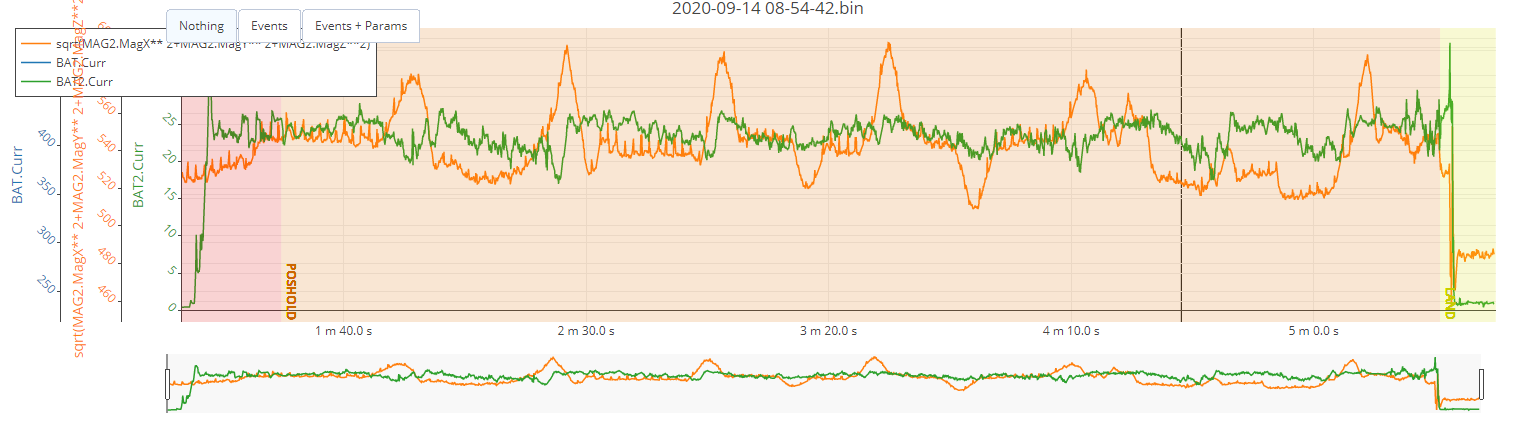
The machine is broken up right now so I will start putting it back together this week. Once on it’s feet again I will need to make sure I run compassmot on it. Also I think I need to ensure that compass is disabled. I don’t’ need the noise in the system. This right now this is all I can think of.
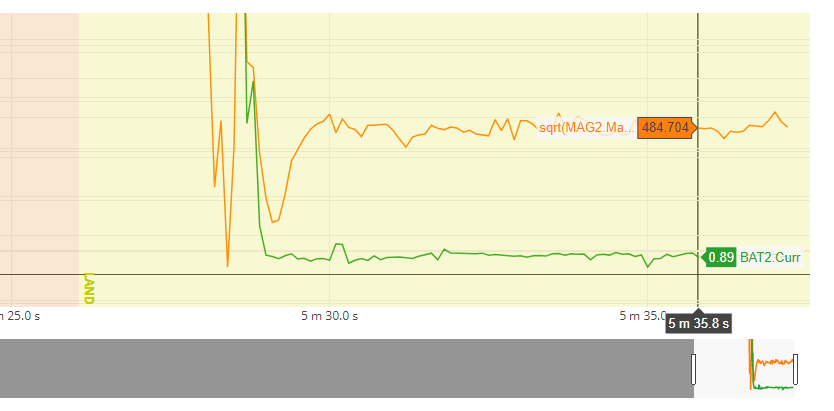
I just noticed that if you look at the far right end of the graph when the crash occurred. The compass looks healthy, but the machine isn’t drawing any juice as its shut down.
I’d definitely aim for about 5.2 volts DC for Vcc, see if caps smooth that out, but you might need inductors too, or a totally different power-brick or BEC.
Ya the 5.2 is something I am focusing on for the rebuild.
I have also included Capacitors in the build to help smooth out the rough. However Inductors was something I didn’t have in the plan. Will have a look if it’s possible.
I have new power modules coming to replace the one on the bird as I couldn’t ever get better then 4.95 from it.
Do you have a gimbal or something that you moved during flight? As you see on the MAG2 view there are spikes but far away from each other, almost a minute a part and they are not that sharp. So something slowly changes the magnet field.
Could potentially also be the calibration of that compass that need another round.
As you have the other good one I can’t see why MAG2 should impact your flight, maybe some of the dev people know. It maybe is the gps in your case.
Yes, widening window on a multimonitor configuration (BTW, a extremely useful feature):
Windows and Linux. On Mac OS X windows don’t seem to expand over more than one monitor, or I don’t know how to do it and never have seen this documented.
See also http://plot.dron.ee and compare:

I have a gimbal but I don’t typically move during flight. ]
But apart from that I have no idea what would pulse at 1 minute interval.
I will recalibrate everything. Every compass in this bird has. I will do Compassmot as well.
I am adding extra capacitors to it as well.
Looking to improve the vibration dampening as well.
New GPS…New Power Module.]
Mag and RF shielding as well.
Anything I can do to improve on it.
What kind of GPS/Compass are you using? You could try a rm3100 compass as they are much more tolerant of interference
I have a couple Holybro’s on their way.
I had a look at those compasses and read the review and documentation. They sounds excellent.
I will put that on my shopping list. A couple of them for both machines could go a long way to improving the machines performance and reduce risk. I like to build but man I am sick of rebuilding.
Thanks for putting me on to this thing.
Hey Dave.
Hope all is well. I ordered a couple Drotek RM3100. The reviews look good and I want to remove any chance of failure. Thanks for the suggestion.
Cheers
I also was looking at that compass, looked very good in their own test. I will closely follow your progress, I was planning to add just another simpler compass to give some redundancy.
Seems like the compass in the new GPS unfortunately is very noisy by default without interference, average is good. Have to do some more tests, might be that it’s just more sensitive to calibration.
I added a second to my 470 and it ended the glitching …once in a while I get an EKF warning but no glitch.
Good to hear. What compasses do you have? How far apart did you put them and how often do you calibrate the compass? Do you always fly in stabilized mode? Lot of questions, trying to learn the hard way 
I have recently realized that for me the issue is more common in Loiter and I can see that the PID in Loiter might be to aggressive and add oscillation that also is a factor in this.
Feel free to ask what ever you want…This hobby is all about learning.
I have to cheap M8N, one is on a mast about 3 inches high and the second is on the frame maybe 6 inches forward of the masted GPS.
I outlined where it is on this older photo.

I have only calibrated the unit once after the final build. But I am looking to change that to calibrating at the field next time I am there.
I fly in stab mode only to get off the ground,the rest of the time it’s in POSHOLD. So my dependency on GPS is pretty high.
I have some drift in lotier and poshold…it’s not to bad…I am pretty happy with it. But I think the GPS just isn’t up to the task. So a new GPS and compass is on it’s way.
My hexa performs about the same. Well it did till it panicked and flew into the ground prompting this series of posts in this forum.
Looks good.
I will also try to get them as far apart as possible.
Have you tried any kind of canopy over the flight controller to protect it from the wind? Was thinking of your vibration issue.
Yes both have canopies.
In fact I am wondering if the canopy is the cause of some vibration. Perhaps wires touching it and then picking up noise as it flies.