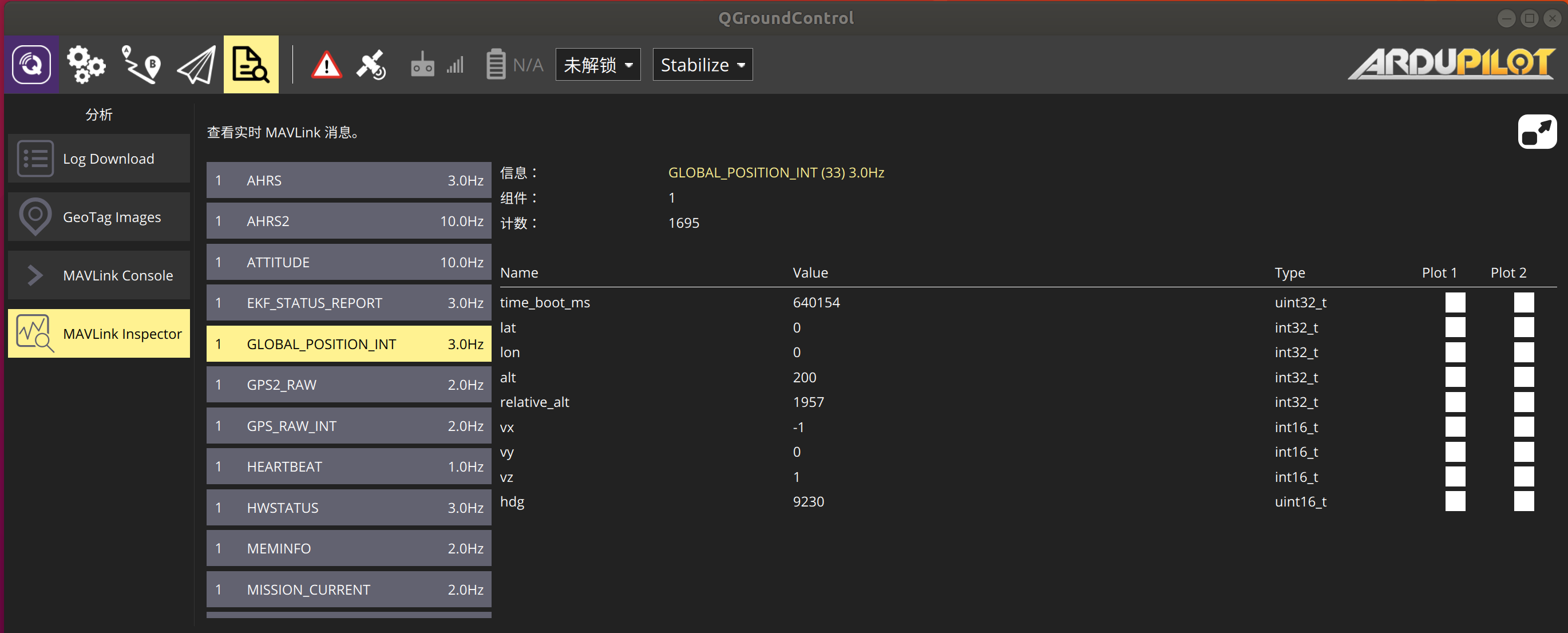
As you can see, The time_boot_ms / relative_alt / vx / vy / vz and hdg para are fluctuating. But i still can not see the lat lon and alt show as I set before.(I set them as 10 10 10)
I want to know what should I do next.
Another small question:
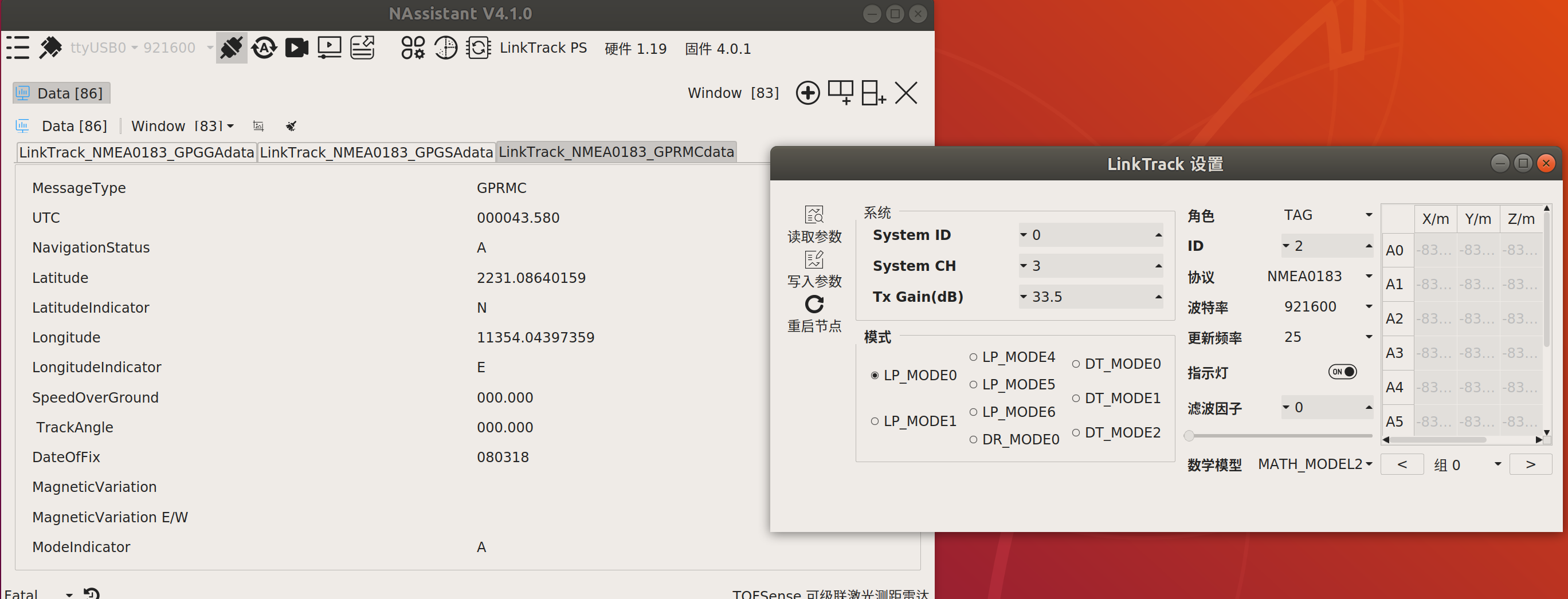
Now that the linktrack module support NEMA protocol, I want to know how can I do to replace GPS(I think it is more convinient than above way).
Amovlab(you must be know about them) had succeed to do that as i said above in Mini V4, but i can do like that in my CUAV V5 NANO.
Happy weekends!
I am sorry about that I did not express my idea clearly. Because I use PX4 at the first time, I still want to use UWB on it yesterday. And now let’s give up PX4, talk about Ardupilot only.
In my CUAV v5 nano and pixhawk 2 board, I tried 2 methods to get my location, but failed. EVery Firmware version is copter 4.0.5.
Replace GPS with UWB in the same place, the UWB was set to NEMA protocol@921600. As follows, the gps work fine, but UWB is not detected.
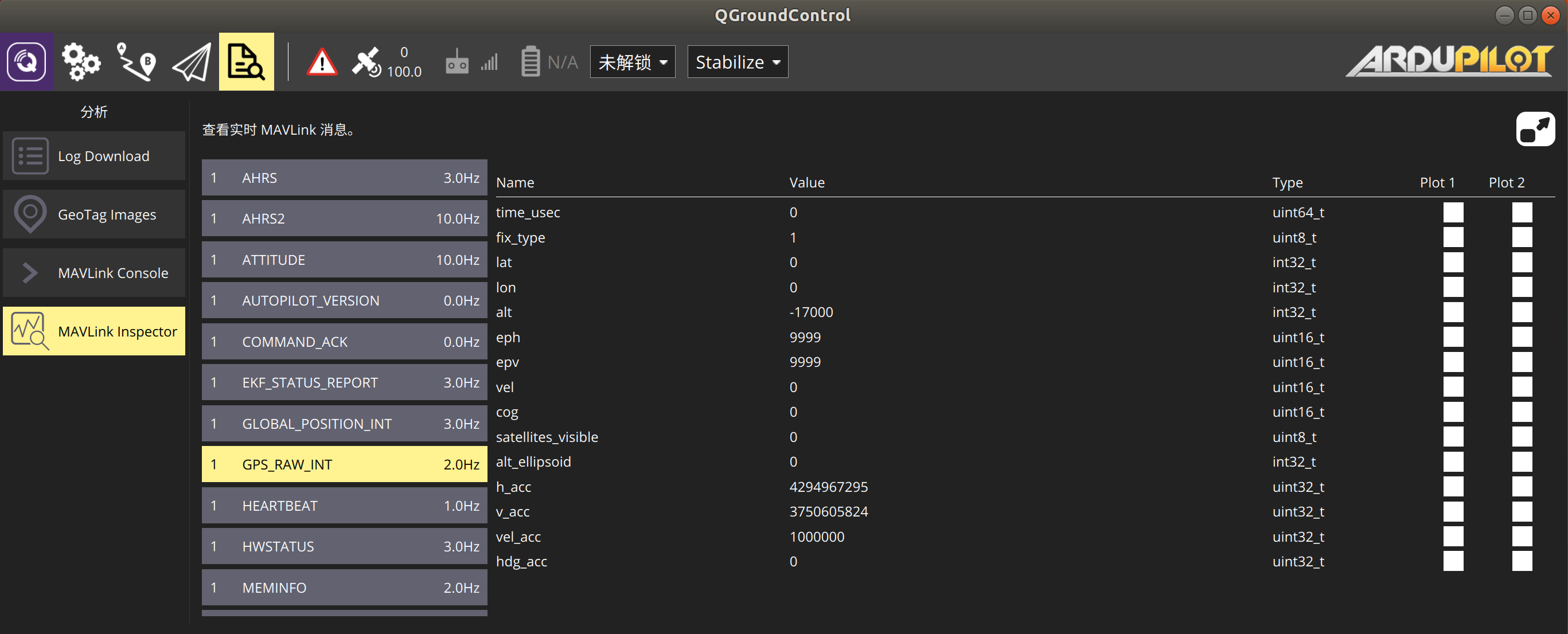
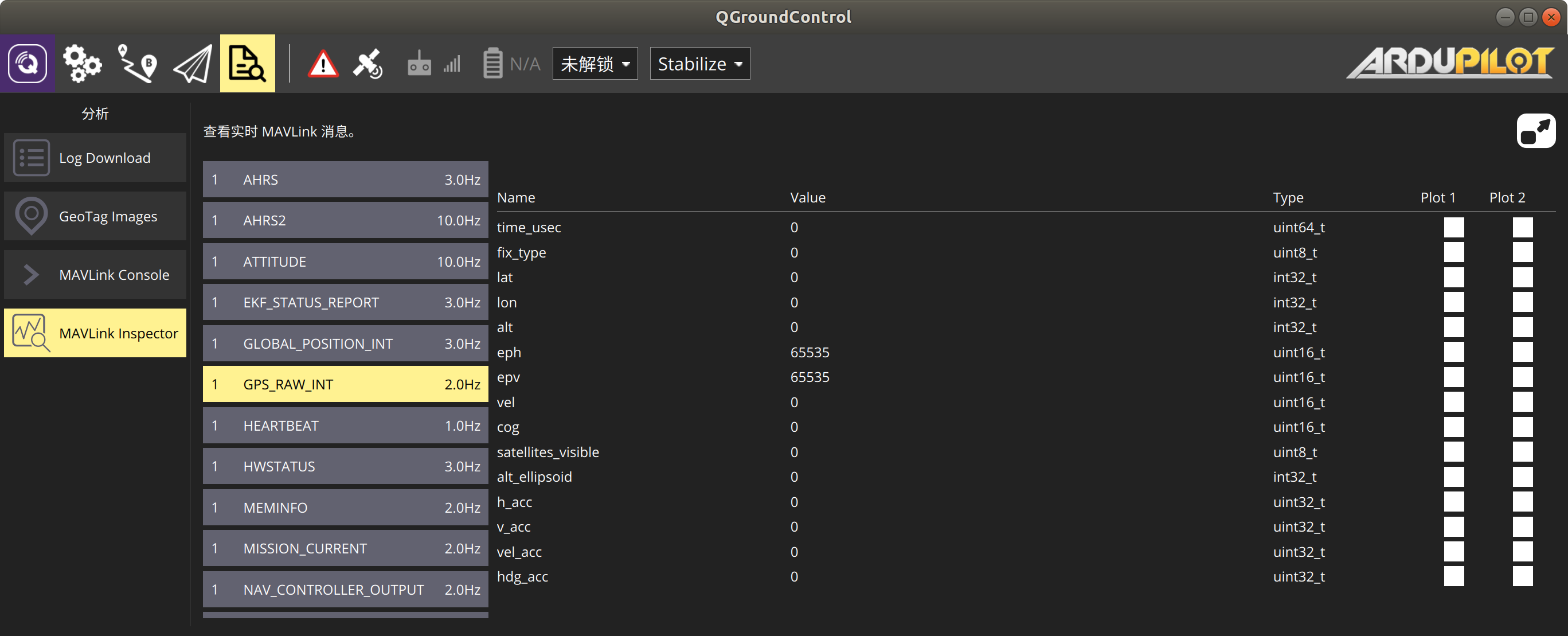
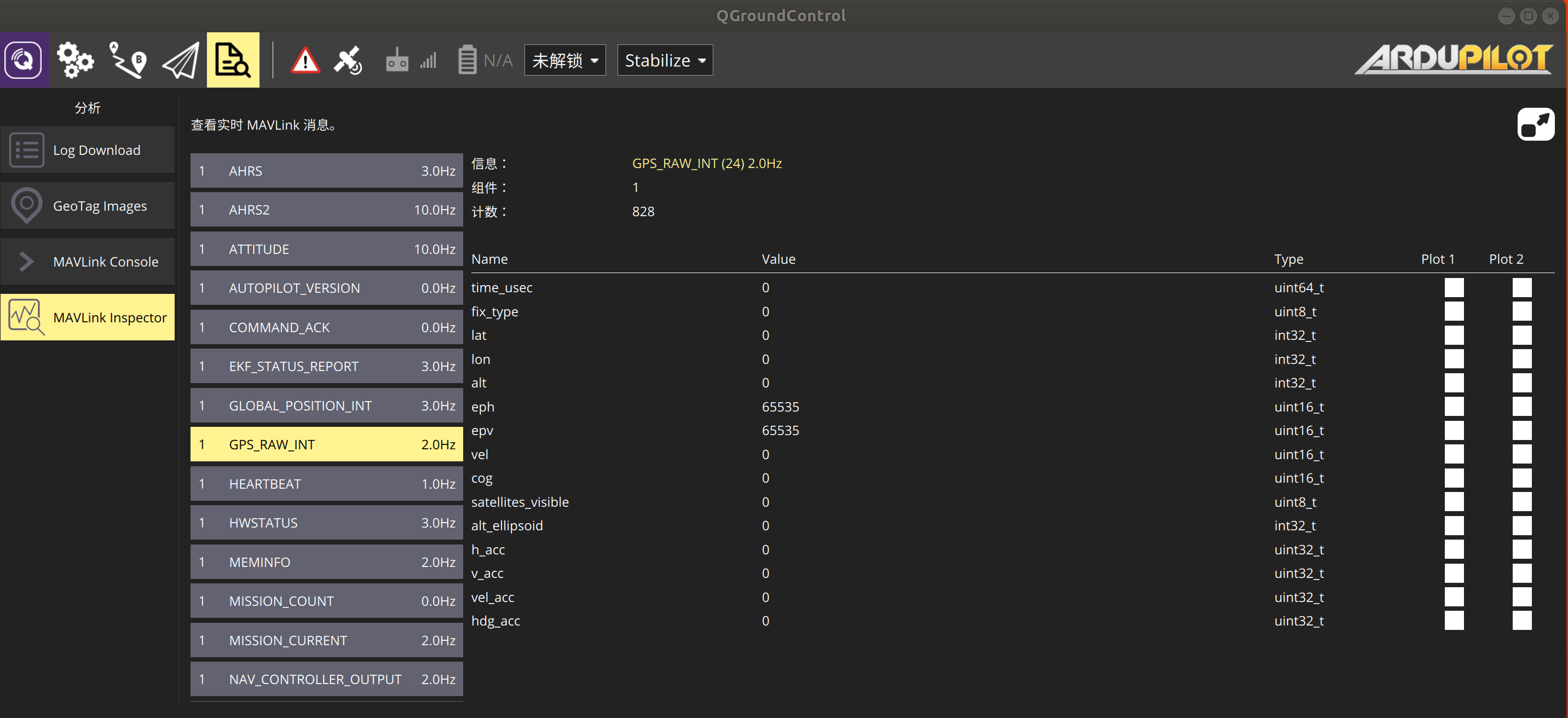
Setting as we talked above, I still can not get the gps information. Here is my para setting doc. copter4_1_0_ydm_para.txt (27.2 KB) . I naively thought that the GLOBAL_POSITION_INT can reflect the gps information. But actually the GPS_RAW_INT para showed nothing. I am very sad.
Hello, how is it now? I follow the official tutorial to configure my flight controller(CUAV V5), but my flight controller cannot get LINKTRACK data,I am very depressed… https://ardupilot.org/copter/docs/common-nooploop.html