Ozzy, the external compass is the only way to go. I would not even bother with the internal compass. I’m sure you were just trying to get things working but I wanted to pass that along. the only other thing I can think of is the location of where you are doing your compass calibration. Looks like you are doing it in your house which most of the time is fine. but maybe try doing it outside away from the house and make sure you don’t have a magnetic wristband on while doing the calibration. that could affect it too if you kept it close to the compass while calibrating.
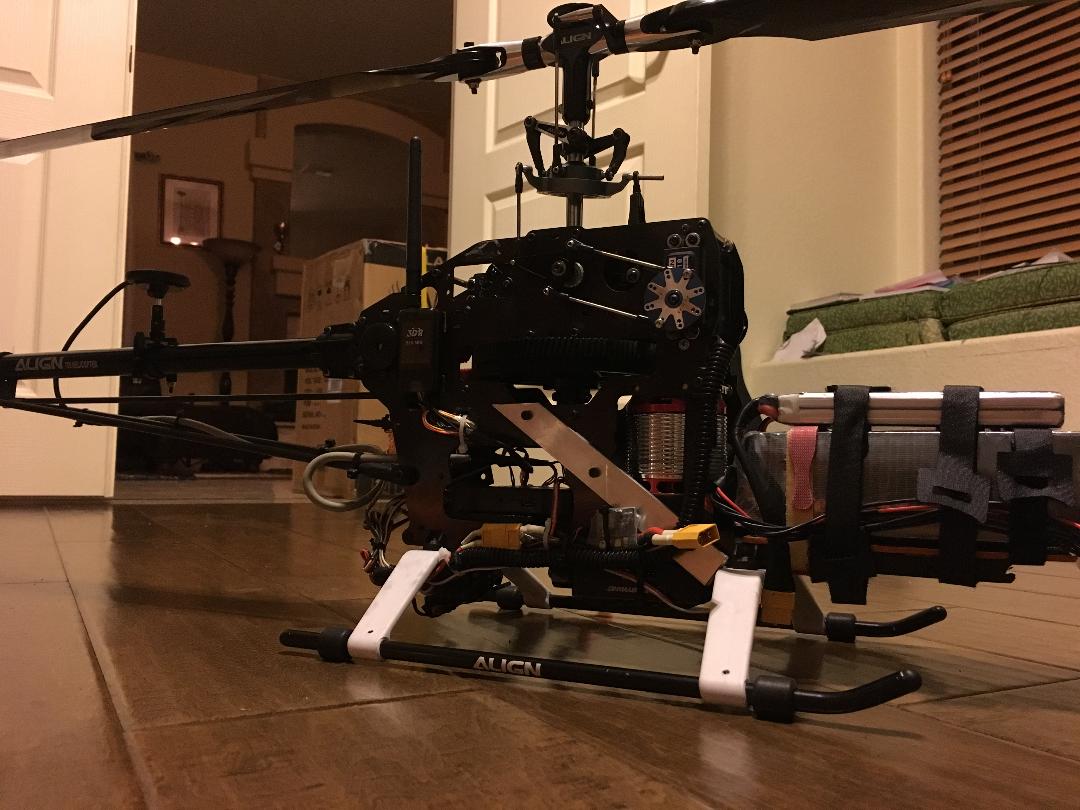
the location of the pixhawk is a little tight but probably workable. Be sure the cabling has a some slack to it. they can cause vibrations expecially with the pixhawk 1 since it has not vibration isolation for the IMUs.
Also get that beeper away from any sensor. It is a bad guy for interference.
The motor is very close. Strong magnets!
But I do not like that mast for the external GPS-Compass. Is that high class Stainless steel? If not there is your problem. Aluminum I hope.
I will recalibrate outside my home today
But I had calibrated another pixhawk and same one before with no problem till I moved the FC to the new location
Also all my cables are tight on the frame and little loss when they get close to the board so that any vibration caused by the frame not passing through the cables.
I will remove the peeper away and the very important point that Fred_goedsert made about the mast!!
Yes the external GPS mast the one you see color stainless steel is the shaft I have for my trex 450 for its rotor head
I cut it to the Long I want and use it !
What I have previously done when trouble shooting GPS/compass issues , is to take the FC and GPS off the heli and mount it on piece of wood, allowing me to easily take the unit outdoors, away from metal objects and do a initial calibration/setup. This will at least confirm that it’s not something with the units themselves.
I found an old 450 shaft and held an magnet to it. The magnet sticks hard. No compass will really work with such a piece of steel close by.
In the past I had those Pixhawk v1 always put side-wards at the frame of the Heli with much better vibration results. Rob Lefevbre did that too.
You change than the AHRS_ORIENTATION for Roll. Because the old pixhawk has no internal vibration system for the IMU it works on its side with best results. But your Heli has not a lot of free space in the center of the frame for that. ( servos )
FRED you are grate Man, once I took that Evil and took the Heli outdoor for Calibration like what Bill said! It worked with my like a champ!
Implicit made a good point and I didn’t confirm that to you! yes I did the calibration outside the heli
and had no problem but that Shaft was the deal killer also calibrating outdoor is super easy I didn’t have to repeat the calibration to get good reading…thank you Bill ! Oh and I moved the peeper up away from the board! :)
guys ‘’’ its working now!
I disabled the internal GPS USE2 ,0 USE3,0 and kept the USE,1
I flew it and it was much much much easy to fly and was study like setting there in the sky!
I didn’t change the tuning for P and D from the last old location … I think I will have to retune the P and D again! to see if I can get higher numbers!!
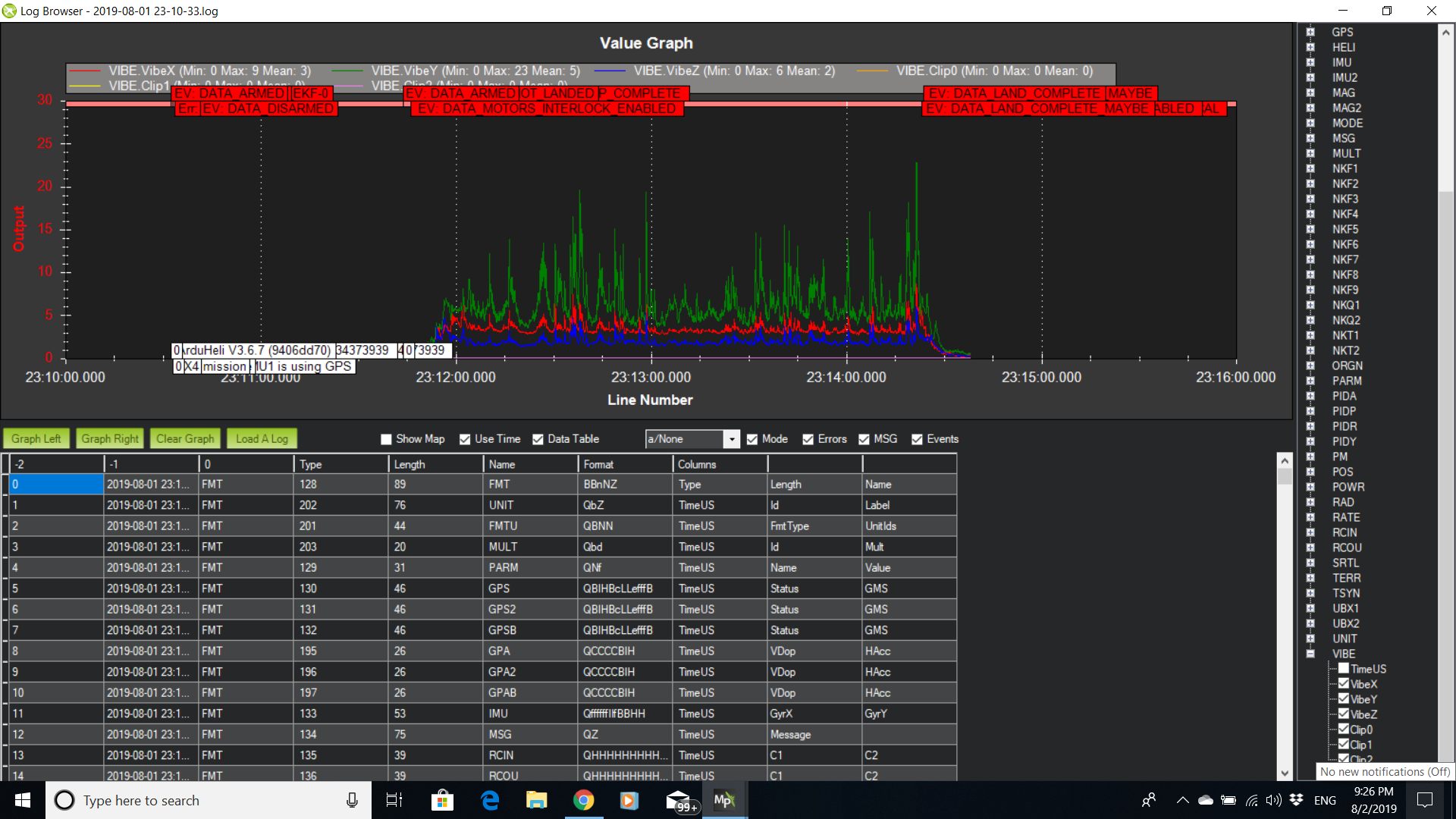
here is the flight logs please tell me if there is significant vibration like the old location…
You vibes look better. I haven’t looked at your flight log yet.
Did you try values at 0.0001? The tune feature won’t let you go that low so you have to input it manually, fly and then change it. Start at 0.0001 and then increase in 0.0001 increments. Any little bit of D term will help
I didn’t like the Gel-moon product, yes its good as a vibration absorbing material!
but was pain to put it in ! I tried it but the vibration was more !
so, I reused the Kyosho 5mm tape… this time I put only small SQ in each corner
with duple side table on both face and bottom to give total of 7mm thickness
the result is better in my flying test… I took a look at the VIB log and the Y axis is under 20 at the end of the flight it jumped to 32 but that maybe for the landing !!
I couldn’t get higher more than D 0.001
I tried to do the hover trim but I couldn’t find the roll angel value from the logs to put it in AHRS_TRIM_X
as the Heli drifting to the left!
I Zero the ground using Iphone digital level
then placed the heli on the top of the frame and its 0.00 and that for both X and Y
then I zero the Pitch by clicking on mission planner Heli setup, manual
and make sure the blades read 0.00 in both X and Y
then I went to the Flight data screen and checked the Horizon level and went to AHRS_TRIM_X, and adjust it to be on zero horizon
then same with AHRS_TRIM_Y
then flew the heli and was drifting to the left!!!
so I downloaded the logs but I couldn’t find the value for the Roll angel to enter it in AHRS_TRIM_X ?
so I tried to change the value of the AHRS_TRIM_X manually but it didn’t work !!
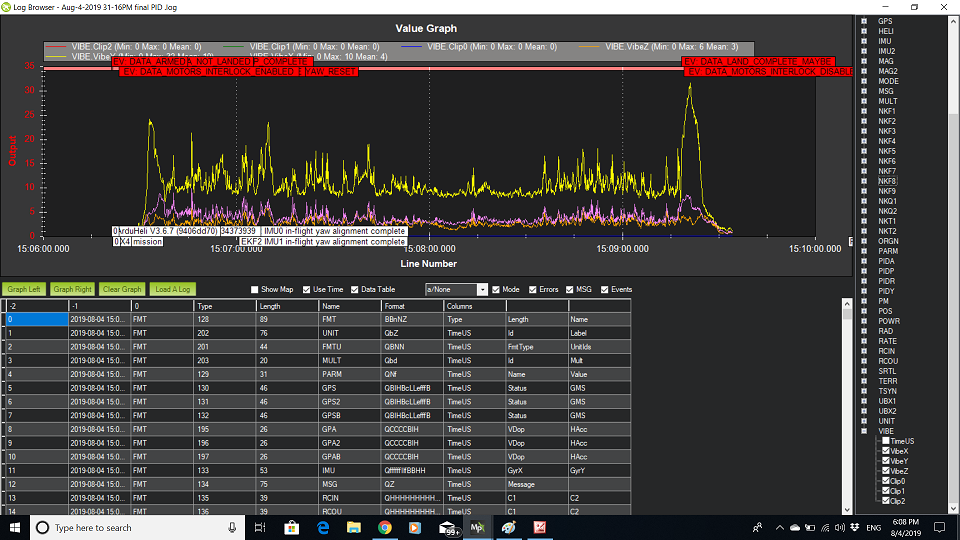
here is the logs before I changed the Hover trim adjustment
I use the full parameters screen on MP
And when I change the AHRS_TRIM_X I see the horizon level screen change
Edit: I like MP because it’s giving me all the tools to NAV around and easy to use
The helisetup screen what I use to fine tune the heli! It’s giving me the best way to set the passthough and Active mode to set the Max and low pitch degrees !!
So
I leveled the heli completely 0.00 on the ground and I adjusted the AHRS_TRIM_X till the Horizon read 0 level
And I flew it but was drifting to the left
My question is on Wiki says ; after hover the heli lend it and go to the logs and check the ROLL Value ; insert it in AHRS_TRIM_X
OK, I was able to do the Hover trim ( manually entering the X values in the parameter) but when I had it level stable, I lend it and put it on a flat floor and the pic of the Horizon look scary!!!
take a look ! again ( the frames was checked and its 0.00 and the floor also 0.00
also put small level indicator on the pixhawk and it read 0.00, bladed were all tracked 0.00 at 0.00 pitch!
I don’t know from where the pixhawk brought that value to be stable!!
Ozzy,
I’m not sure if you understand how the ATC_HOVR_RLL_TRIM parameter works in the software. It is designed to add that roll angle on top of your stick inputs so as to keep the aircraft hovering at that roll angle to maintain no drift in a hover. That way in stabilizing mode not constantly holding the stick to the right to maintain a no drift hover in calm winds. The reason why helicopters require a right wing down attitude while hovering is because the tail rotor is thrusting to one side and that is countered by the aircraft roll attitude.
So my recommendation to you is to set your mother roll trim parameter to 400. And set your AHRS trim X value to zero.
Edit: @flyingdragon my last statement should read “So my recommendation to you is to set your ATC_HOVR_RLL_TRIM parameter to 400. And set your AHRS_TRIM_X value to zero.”
Sorry, when I hover it and let the stick alone it will yaw to the left.
I have to keep my hand on my rudder stick giving it right stick to keep it heading straight
kind of a gain setup
but its become really smooth after lowering the Vib and tuned P and D
I left the I to 0.18 same as VFF like what Wiki recommended.
and didn’t change the ATC_RAT_RLL_IMAX,0.44 or ATC_RAT_PIT_IMAX,0.44
the other question I have is that on wiki saying that on (hover trim )
Load the helicopter with its normal payload, and hover the helicopter in no-wind conditions in Stabilize flight mode. Land it and pull the log, noting the roll angle that you had to hold with the stick to keep the helicopter from drifting. Enter this value in the ATC_HOVR_RLL_TRIM parameter in centidegrees
where to find that value in the Log?? I been looking all over the logs can’t find that value?
I know you said put the value of 400 in ATC_HOVR_RLL_TRIM, but I am just trying ti see where is rolll angle value in the log??
In mission planner, after you download and the open the log. You will see on the left hand side a list of messages. Hit the plus sign next to the message that reads “ATT”. You will then click the box next to Roll and that will show a trace. You then have to determine when you were in a steady hover and determine the roll angle from that.