Thank you for the quick replay and appreciate your help
I am going today to do all those steps one after one
Will turn TUNE to 0 at the end after tuning D and P
Thank you again
Ozzy
Thank you for the quick replay and appreciate your help
I am going today to do all those steps one after one
Will turn TUNE to 0 at the end after tuning D and P
Thank you again
Ozzy
HI Bill
I finished the P and D tuning
I was not able to get higher numbers in both P and D
when I turn my slide one click (very very tiny ) it will start oscillating,
and the P value was shaking even on .005 so I had to cut this value in half to .0025 and entered it manually !
its look like my heli don’t like any numbers on P and D !!
now what to do with the I gain? in Wiki ; It is recommended to set the ATC_RAT_PIT_I gain equal to the ATC_RAT_PIT_VFF gain and the ATC_RAT_RLL_I gain equal to the ATC_RAT_RLL_VFF gain
so I have .15 on VFF do I need to make my I Gains to .15 too?
here is the parameters for today after the tuning P and D
I couldn’t upload logs becasue I am getting new message saying ( log Browse will not function correctly without FMT message in your log. these appear to be missing from your log.)
do I need to format my pixhawk memory card?? that will delete everything and I must to do everything from beginning!
thanks a lot for your help!
Ozzy
July 27 2019 after P & D tuning.param (14.0 KB)
Just solved the error problem…
I took the SD card out put it in my PC, format it… then install it in my PIXhawk and run my QGC and uploaded the 3.6.7 ardupilot, and then closed the QGC, opened the Mission planner and uploaded the saved parameters and went out to fly, after landing; I found the logs !!!
how easy was that!
here is the logs for latest flight!
thank you
Ozzy
Ozzy,
Sorry It took me so long to look at your log. It appears that you have a significant amount of vibration in your data about the roll axis and if you look at the Vibe message, you will see pretty high values in Vibe.y which is looking that the lateral axis. It appears to be a 2/rev. How is the track and balance on your heli? How tight do you make your bolts that hold the blades to the hub? I’m just trying to understand what makes your helicopter oscillate at an order of magnitude lower P gain values than most.
HI Bill, thank you for come back here,
I checked everything looks good! no problem with the mechanics,
I had blades loosen last week before the last two flight but the new logs came from solid and tight machine ! is it maybe it need lower DFC head? mine is the traditional Trex 600 ESP but its FBLS
thank you
Ozzy
I am thinking that since the heads peed is low, then the blades need to be tighten more and so that the winds don’t push them back and that create a wobbling or shaking which indicated in the logs…
I will tighten the blades and go for flight test and uploads new logs hope that will fix the problem
Thank you
Ozzy
here is the logs as I tighten the blades and I found a little play or movement (just tiny bit) in the rotor head where it go on the top of shaft, so I tightened the screw more! still there is a very very small amount of play, but I think that is normal for align helis
please let know if the vibration is gone
thank you so much
Ozzy
Just a reminder, that although ArduPilot tries very hard to fly well, if you don’t have a properly set-up of the mechanical parts of the vehicle then weird things are sure to happen.
On Helicopters this is extremely important, and any guidelines for assembling and tuning all the mechanical parts is fundamental.
So any excessive gap/play on moving parts is to be corrected immediately. Also the blades tightness should be correct, and not overtightened or loose. If your Heli does not fly well with a regular FBL controller, ArduPilot won’t make it fly any better (although it tries  )
)
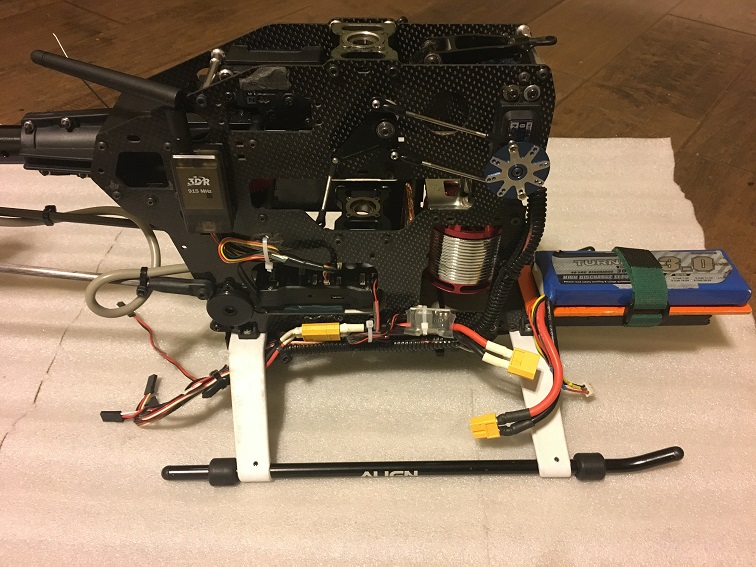
Looking at your flight that you videoed. I see that you have your pixhawk up on the tail boom just worried attaches to the frame. That is probably contributing to the vibrations I’m seeing. A better location might be along the side of the frame closer to the center of gravity of the aircraft.
You never confirmed that you tracked and balanced your blades. This is an important step in setting up your aircraft for low vibrations. Is that what you meant by you checked the mechanics?
Not sure what you mean by lower DFC head. I am curious about the head design. Could you post a few close up pictures of the rotor head. Aside from the significant vibrations, you have a very lightly damped rotor mode which keeps you from increasing your P gain.
I made that piece of wood and mounted with a double side tape on the tail gearbox so that the GPS and the unit itself will stay same orientation
I tried first time to mount the unit on the tail gearbox by itself and mounted the GPS on the tail boom with home made base, but it was always telling me that compasses inconsistent messages and never lined up !
So I made this wood and mount both on it to make sure it will be calibrated on the bench and mount them both without moving them apart to get rid of those messages !
I can try to take them apart again and redo the traditional way by mounting the unit on the gearbox itself and the GPS on the boom itself !
Yes, I tracked my blades and they are almost 00.02 to each other. So the blades are well tracked
The head as you see in the pics; it’s not the low head instead this is the long shaft.
direct drive linkages the way most modern helicopters are, but this is the older model 2009 it have longer shaft and older design
But that should be no problem !
I am thinking also that could be because of the pixhawk after market dumbing base? Maybe these Are shaking and have to much flex so that when the unit sit on it you can shake it even by the finger and not like 5mm thick double side Tape little tougher.
I am going to separate the unit and the gps and calibrate them again after install them on the heli and fly it again and report the logs
Thank you
That setup is almost guaranteed to pick up vibrations from the tail. Move the FC to the main frame.
I already moved the FC to the main frame under the shaft, but I been chasing my tail for two days now!
The GPS never good
Messages like High offset compass
And bad health every time I calibrate the unit
I even disabled the internal gps just to try
The exterior gps now is not calibrating!
I also tried to calibrate without turning any servo or motor one but with no hope!
There is no metal objects except the motor
And I can’t move the motor or the CF board anywhere else!
I also tried to mount the CF on the gear box just like many people do but still the gps showing bad health
Thank you
Ozzy
I think that is how most of us configure our compass settings. there is no GPS in the FC. It is the Compass. So disable the internal compass and use only the external compass that resides in the GPS.
When you see heading changes, or get error messages while operating servos or starting the motor, you really need a different position for your externally mounted GPS/Compass.
Current flow through the wires to servo and motor will have an effect on compass reading, when placed close to the compass.
Deactivating the internal compass is also a very good idea.
I just tried that
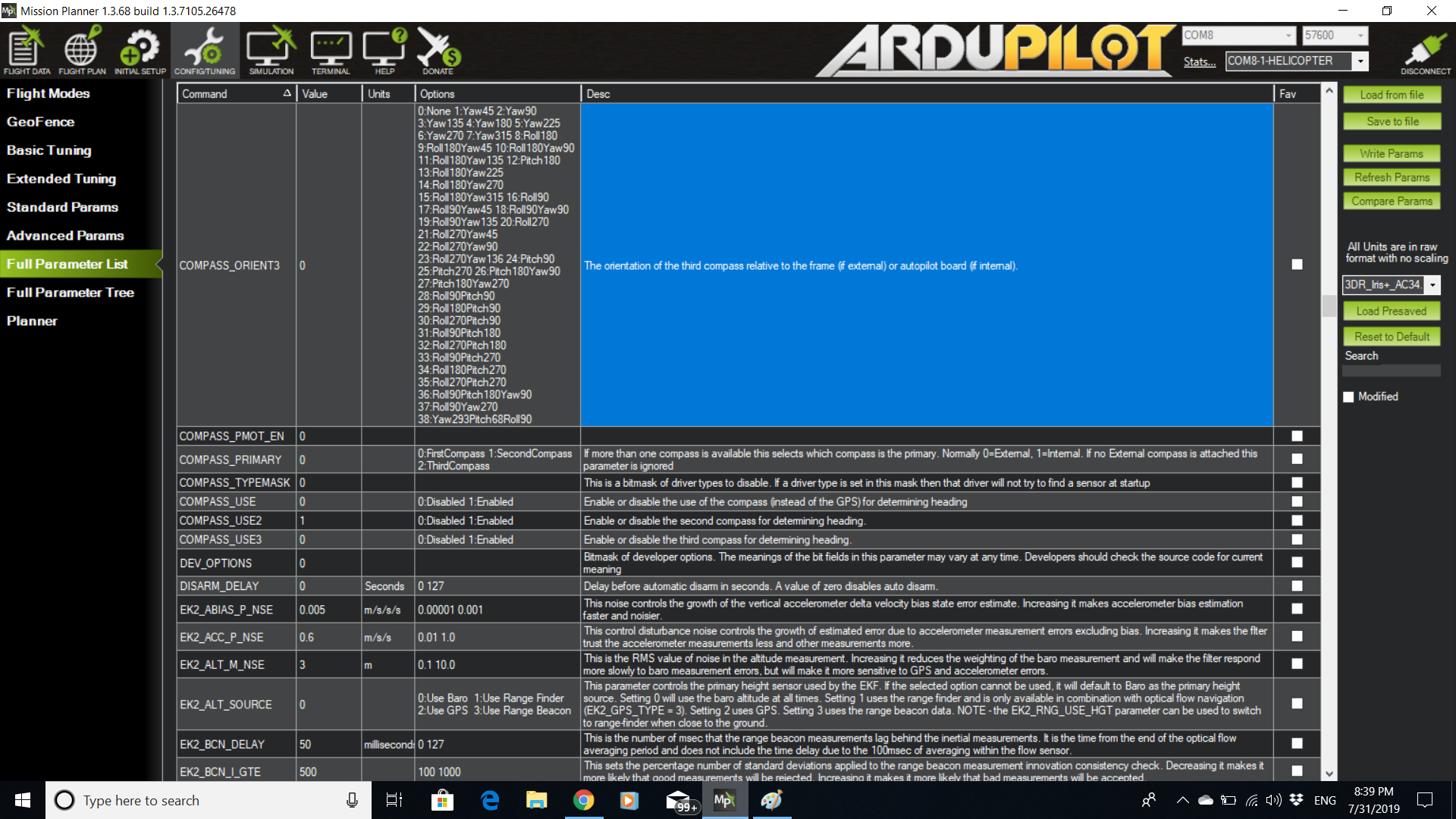
COMPASS_USE,1
COMPASS_USE2, 0
COMPASS_USE3,0
And it keep telling me
Prearm Compass offset too high
I formatted and installed fresh firmware 3.6.7
And uploaded fresh parameters
But still
By the way I calibrated the compass and was on the green through QGC
It’s just happened after moved the FC to the frame
I had no problem when the FC was on the tail
(Part of it on the tail)
Any idea what to try ?
Thank you
Ozzy
After you moved your controller and GPS/compass, you have to do both the Accel calibration and the compass calibration. If you load your parameters from a saved file after you did the calibration, then you need to redo the calibration because the loading of the parameters will overwrite the calibrations.
Ok I am going to extend the external gps and mounted further back in the boom itself,
And do complete calibration by keeping the internal Compass disable
And just to confirm that I having this issue even if the Servos and motor are off and disconnected …
I am trying to find the source of the magnetic field, I also removed the tail servo completely just for testing
So really there are nothing ON except the BEC! And it’s located underneath the frame!
Let see if I can get it to work after extending the gps cable, mount it away and do complete calibration like what Bill said.
Will report the result today
Thank you
Ozzy
Make sure that you the correct orientation set on the external GPS.
If it isn’t, it’ll never calibrate
I did check the orientation ;
in fact I recheck it every time I do calibration!
so I extended the cable more and shielded to make sure will work good,
I mount the external GPS on the middle of the boom
and disabled the internal compass,
I redid the accelerometer calibration and the compass calibration
and the surprise was that the problem with the external compass ;
it keep telling me compass offset too high,…
so I ;
COMPASS_USE,0
COMPASS_USE2, 1
COMPASS_USE3,0
to activate the internal compass then it showing me now
bad compass health with EKF in red and error compass variance together one after one fast …!
but I can arm normally !
something not quite good here!!
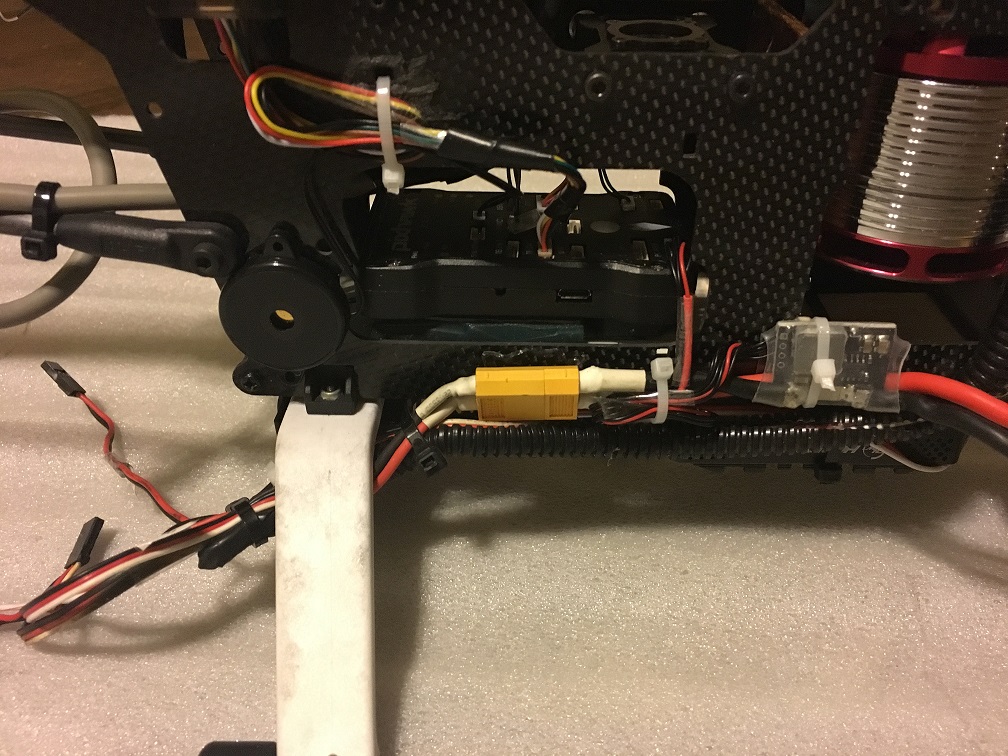
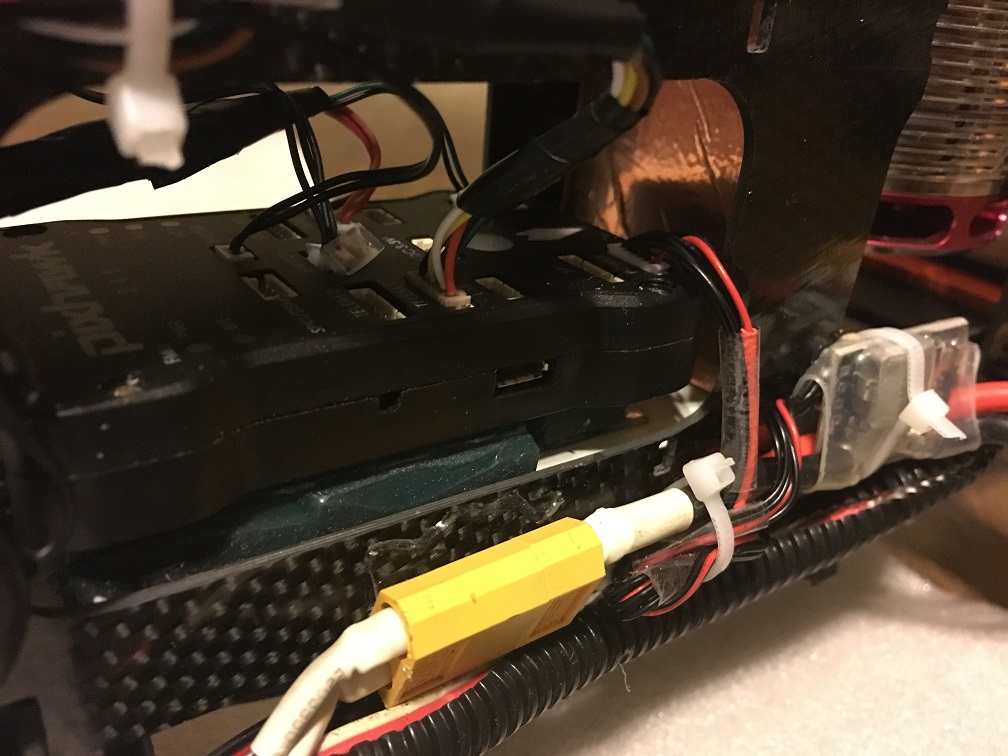
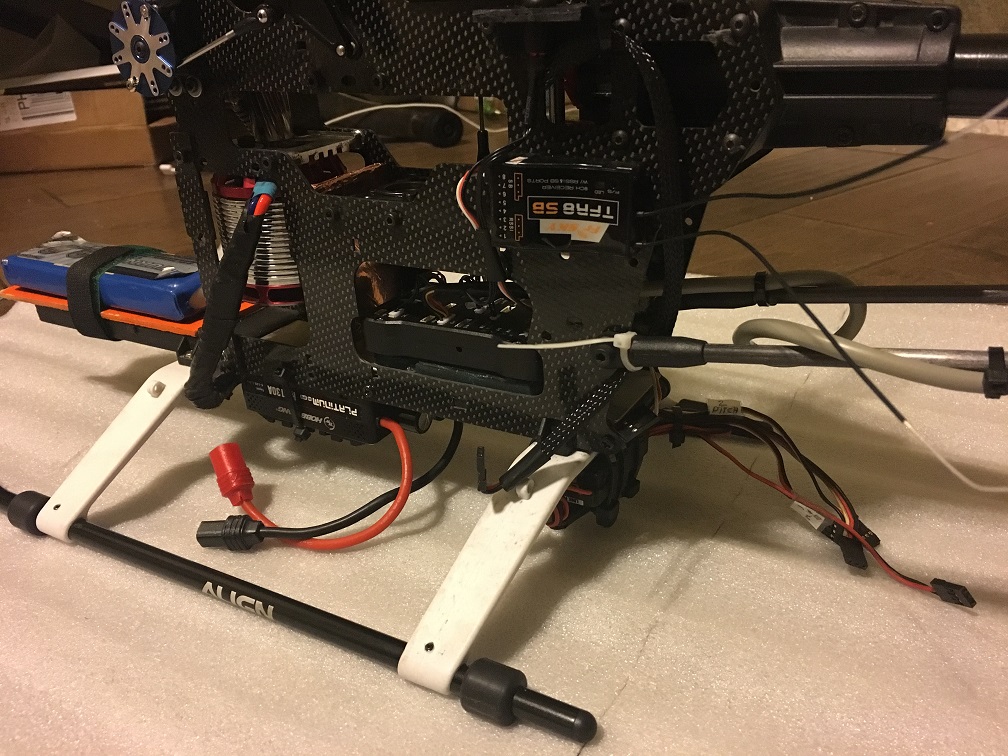
here are two pics of the setup!
still no hope!
I extended the cable and moved the GPS back also installed conductive copper tape on the bottom of the frame and made wood and copper wall between the motor and the FC…
I disconnect all servos and no ESC or motor or any electronics except BEC to power the FC
I tried disable the internal Compass and calibrate the external and the message saying high compass offset!
also disabled the exterior and activate the internal compass and its giving me Bad compass health!
so today I will do the last part before I put everything back on the tail like what it was before and find a way to dump the vibration .
I will make another plate underneath the bottom, just like Wiki suggestion and try it out!
and if nothing work and the original location not working too!
then I will throw this unit away … and buy another one from Ebay store!!
maybe something went bad!
here are pics of the last setup I have
Thank you
Ozzy