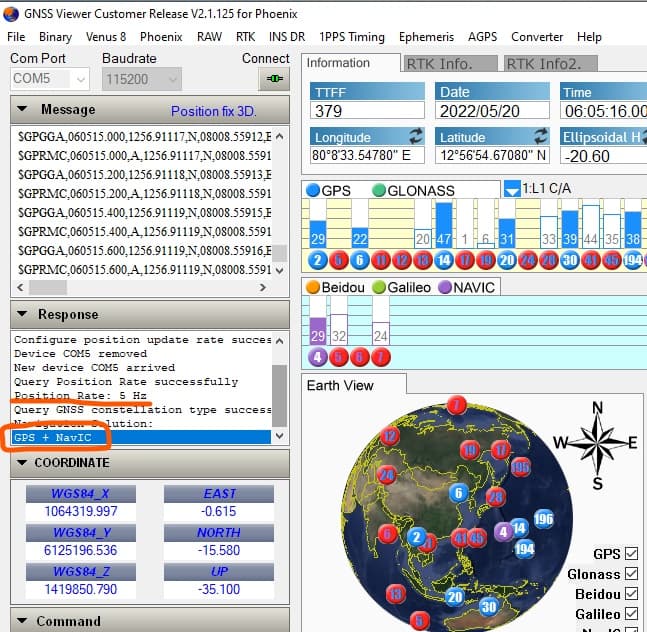
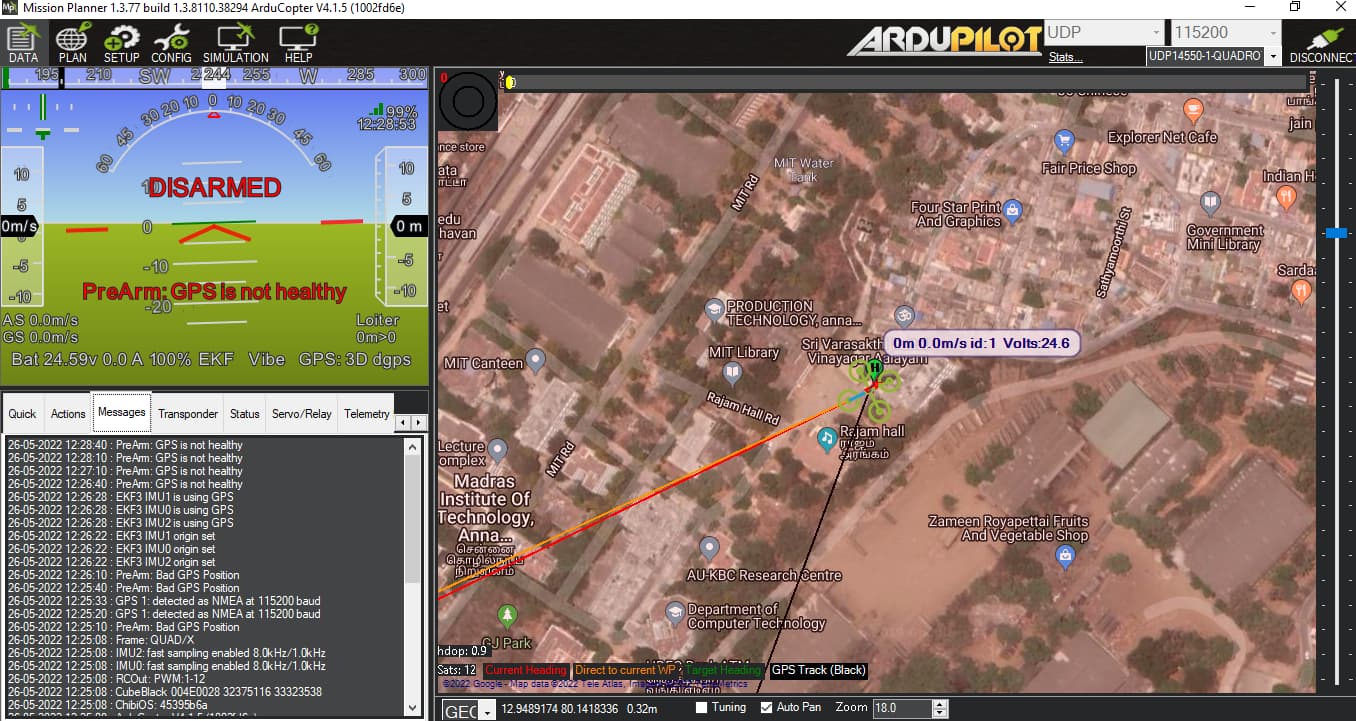
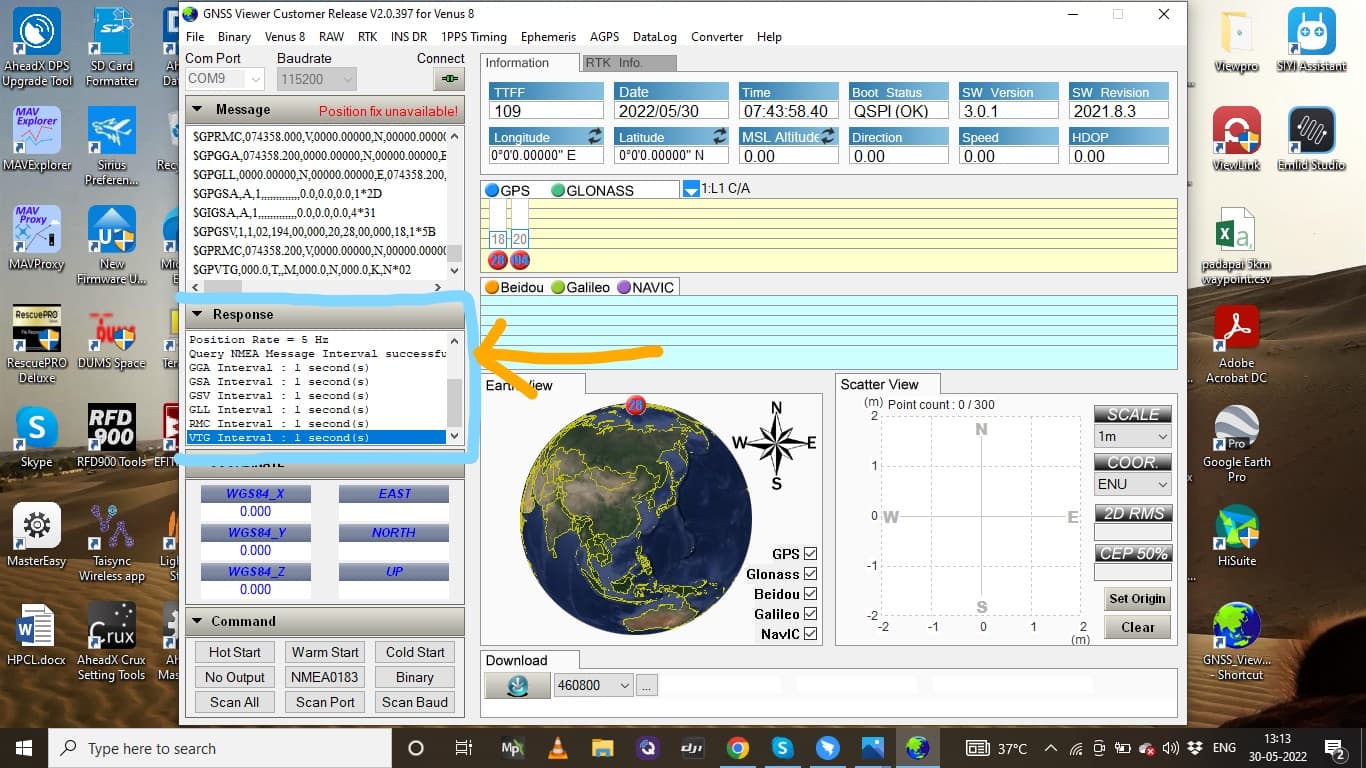
i have been using NMEA protocol GPS on CUBE black running Arducopter 4.1.5 GPS baud rate is 115200 and its GPS position Update rate set to 5Hz. and GNSS constellation is GPS +NavIC
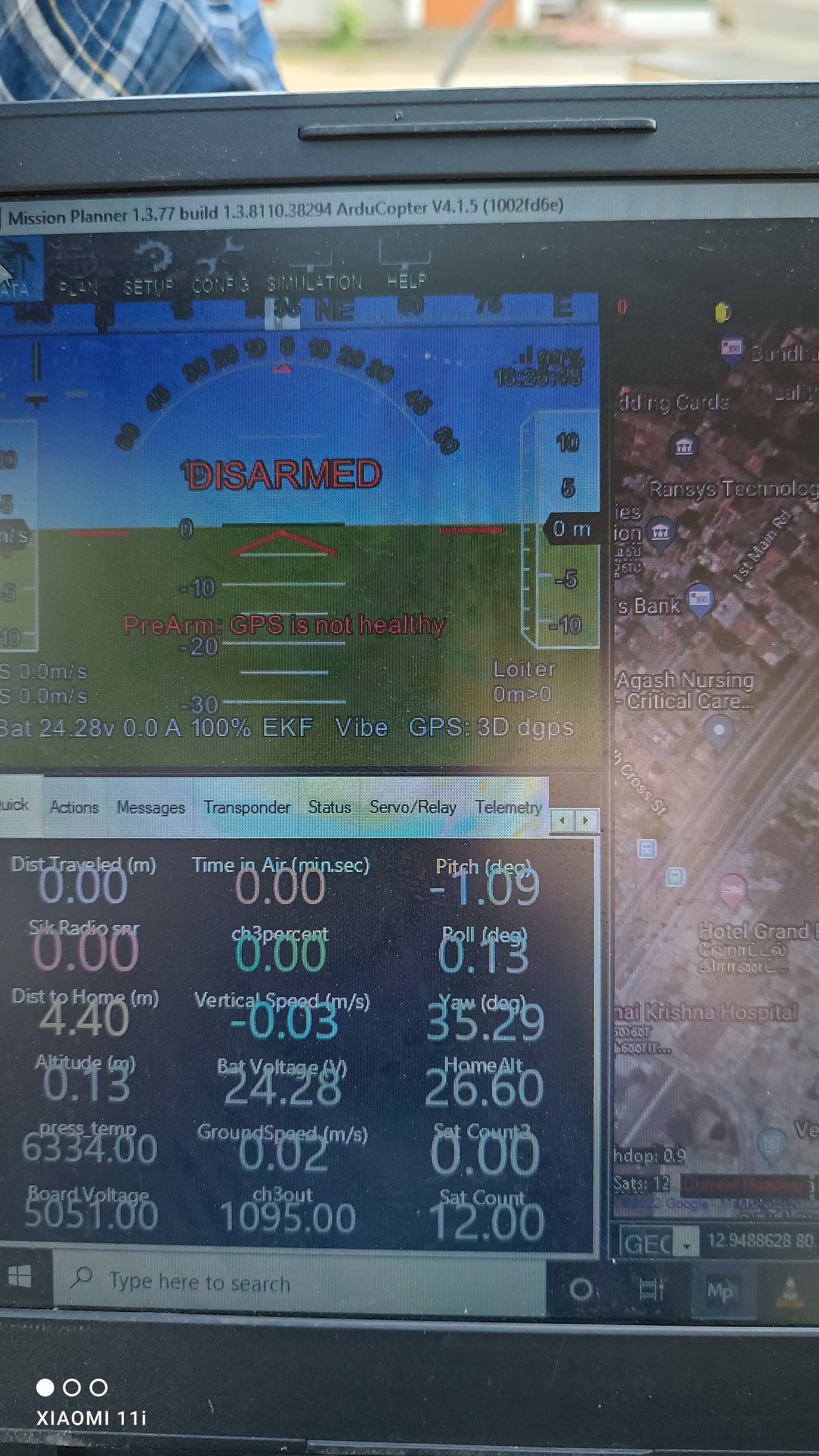
GPS is working well and its output format also verified ok.but when i change the flight mode to gps aided mode like Loiter ,auto,and RTL i got prearm message that Prearm:GPS is not healthy
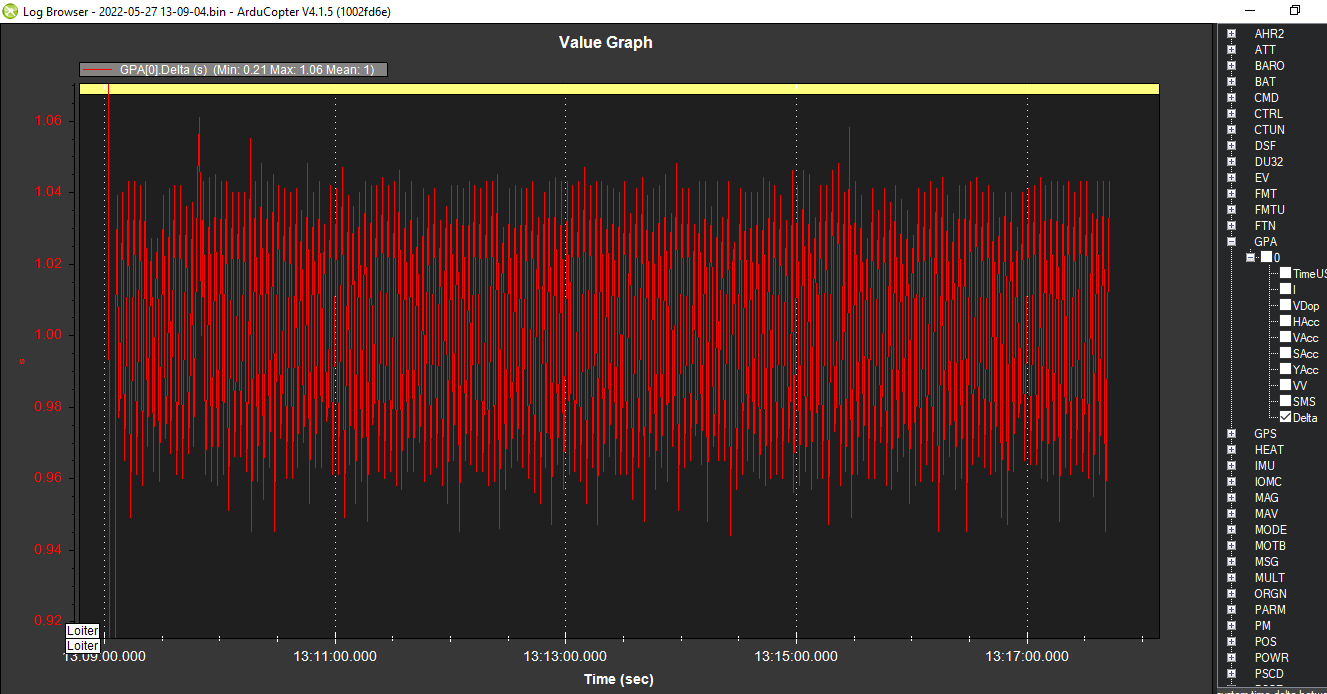
I think I’ll need to see an onboard log but the most likely reason is that the GPS is not updating at 5hz. Instead it is probably updating at a lower rate. If we see an onboard log I think we will probably see that it’s updating too slowly.
Thank for reviewing but as you can see in my 1st of this thread I have configured gps update rates to 5hz only which I have highlighted there in GNSS viewer software.
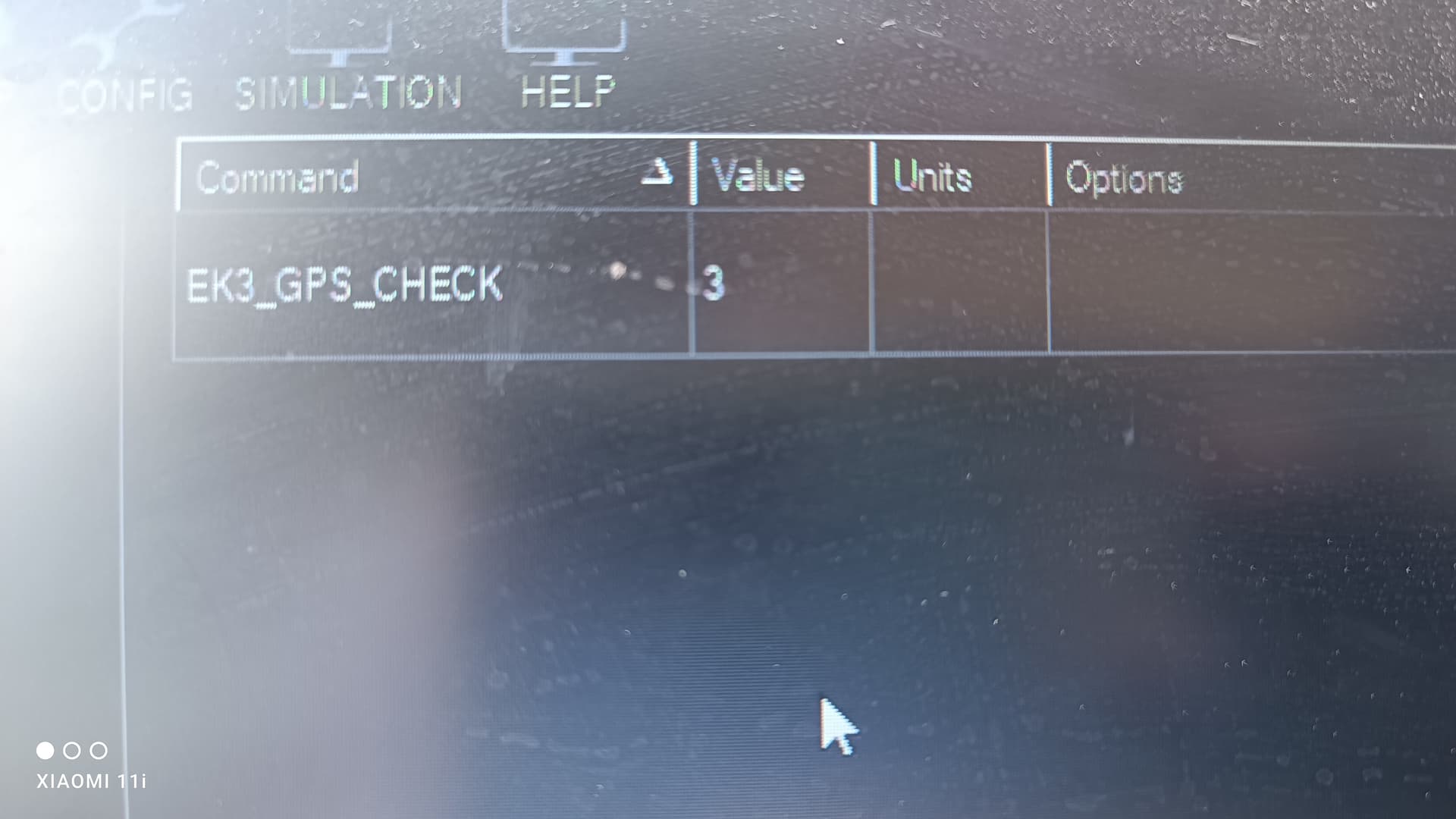
I vaguely remember something like this happens if you try and run without a UBLOX gps as ublox protocal sends a lot more parameters than NMEA so it thinks the GPS isnt healthy when that data is missing but I could be wrong it was a long time ago.
plug in a secondary gps like a UBLOX M8N and the error should go away.
It will fly with the gps you have but its just getting the missing data from the second gps so it stops complaining or you can just ignore the error message.
The way everyone else has solved this issue is with a second UBLOX GPS, I have only seen it before when using some exotic RTK gps setups. The data its looking for is not part of the nmea protocol, its in the ublox protocol.