set EK3_GPS_CHECK to use number of satellites as prearm check.
https://ardupilot.org/copter/docs/parameters.html#ek3-gps-check-gps-preflight-check
set EK3_GPS_CHECK to use number of satellites as prearm check.
https://ardupilot.org/copter/docs/parameters.html#ek3-gps-check-gps-preflight-check
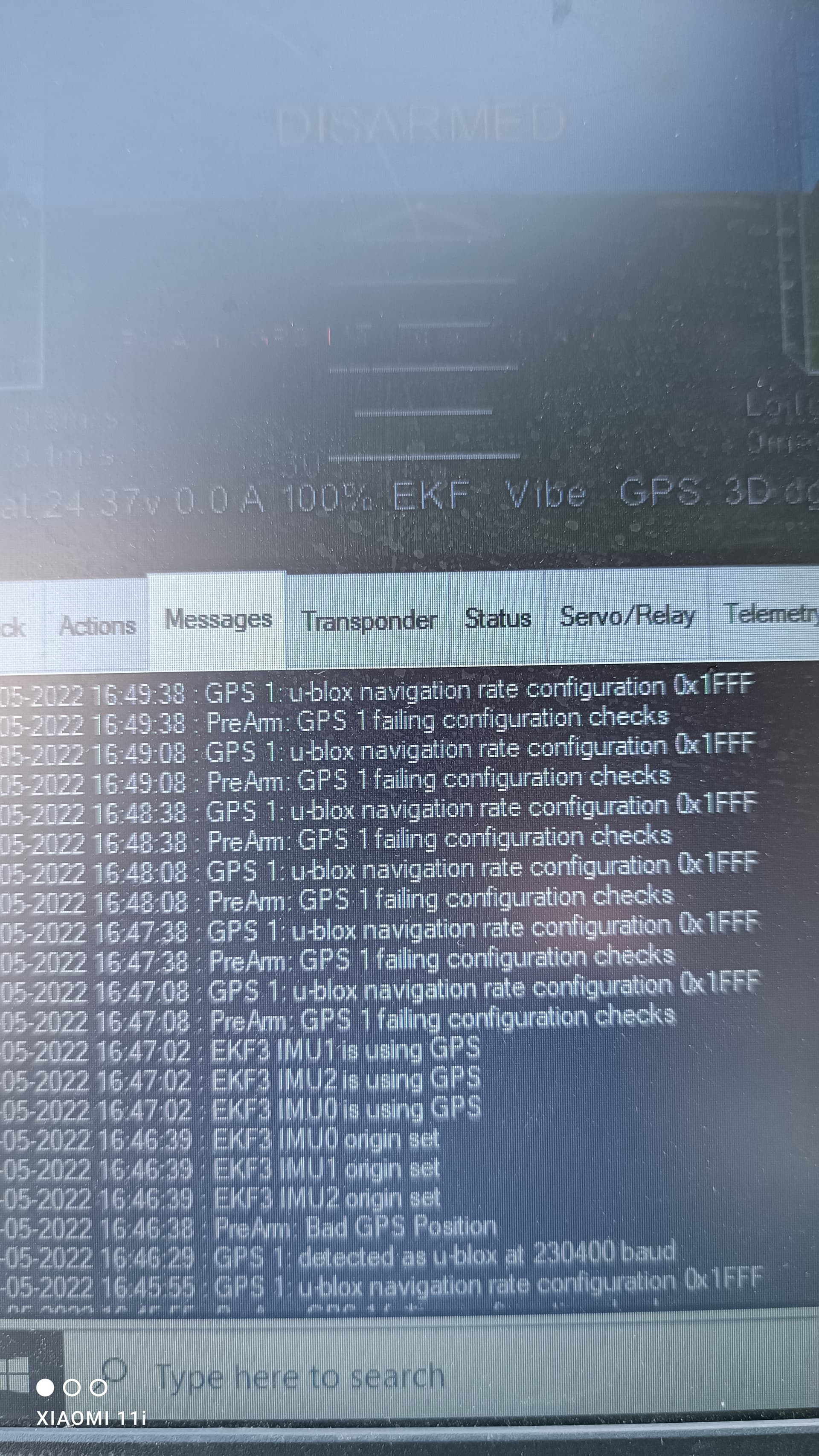
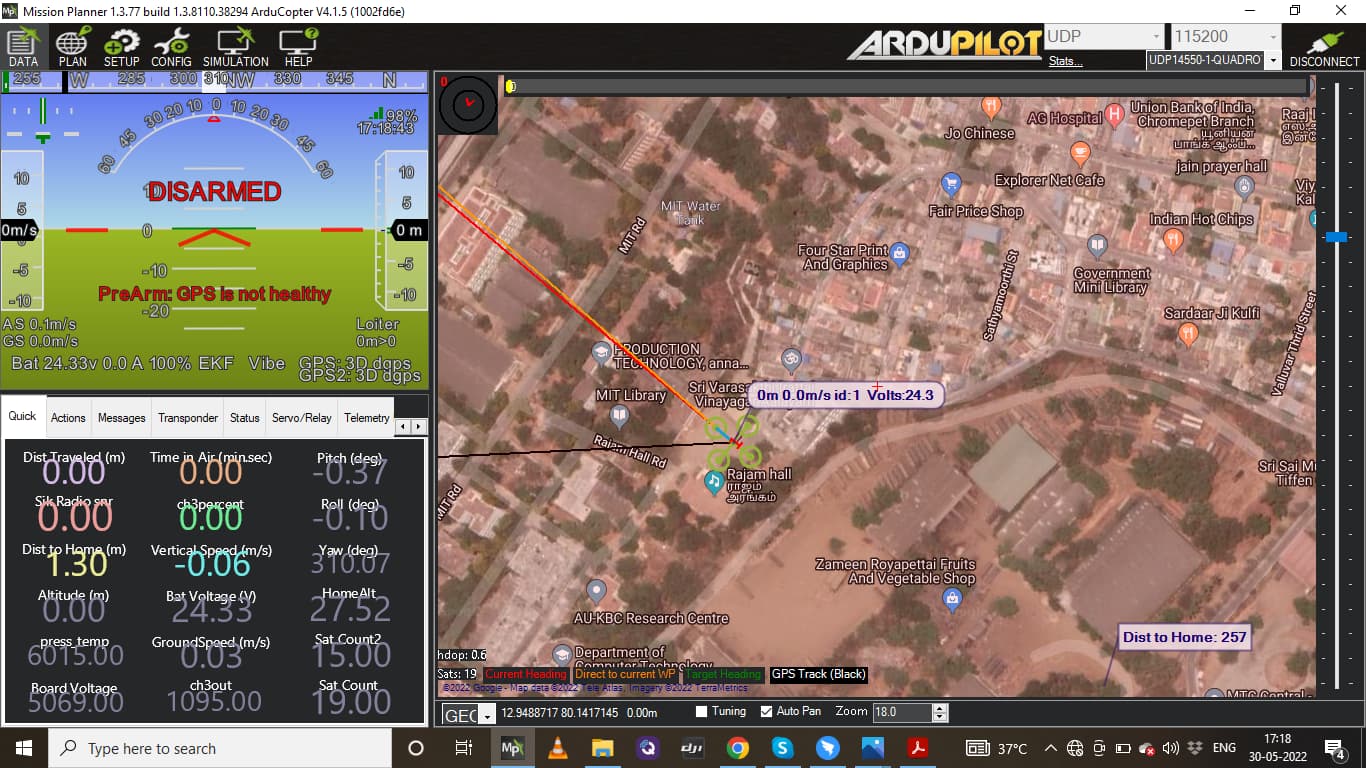
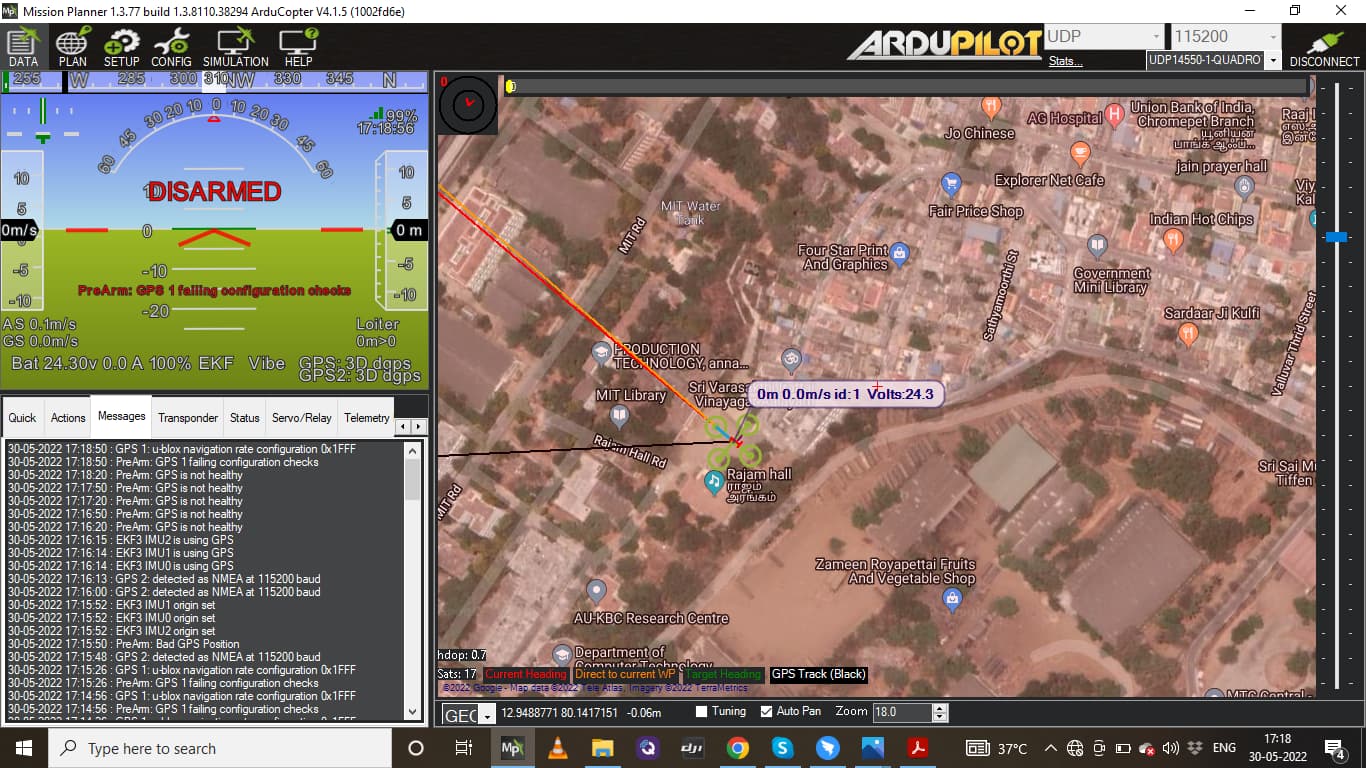
I have changed primary gps as here GPS unit … everything I have reset to default value but still I got this error ?.
its trying to auto configure the gps as a ublox.
I have removed NMEA Gps and connected here gps to check that workes perfectly.but after connecting HERE gps also getting some error.
do you still have autoconfig disabled?
No this time autoconfig enabled.
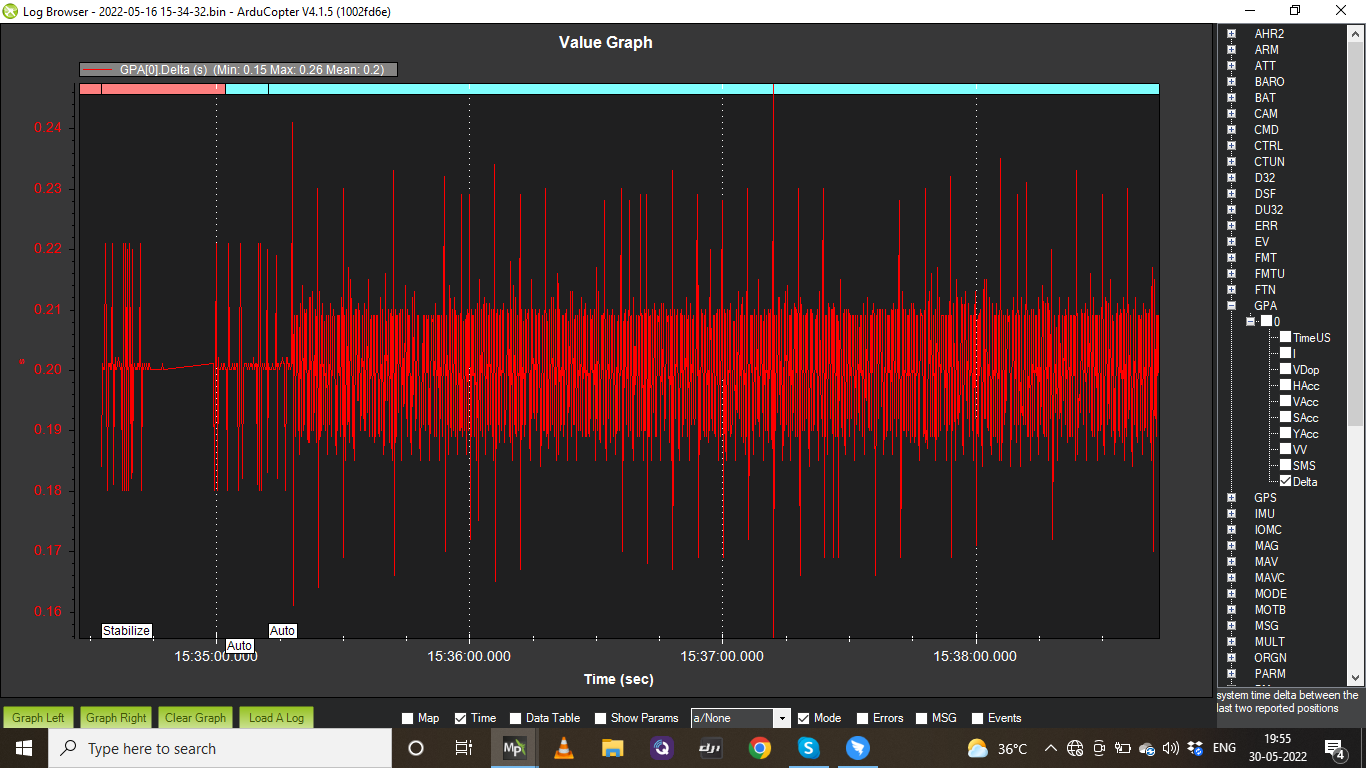
@rmackay9 your right gps is not updating at 5Hz .but I don’t know why its updating at 5Hz even GPS configured at 5HZ only as you can see in the GPS configuration software .
i just realized when see the normal GPS working at 200ms refresh rate but NMEA protocol GPS is refreshing at 1Hz even set at 5Hz update rate.
can you have any suggestion on this if you can help?
below picture is normal ublox gps which is CUAV neo V2 pro.
Here is the NMEA protocol GPS update GPS position Rate.
Hey @kalai1219
What GPS module are you using? If It’s NavSpark or Locosys, I had similar issues.
Hi @Mallikarjun_SE how do you do .
I’m using this module Buy Skytraq GPS/GNSS/IRNSS/NAVIC/GAGAN Break Out Board Module ...
But chip version is different which supports only GPS and NavIC(GAGAN) and output protocol is NMEA .
You also never run success on this …what is the gps protocol output it’s NMEA?
i was never succeeded in emlid M2 module on when select NMEA protocol also.
only successes when choose GPS protocol as ERB on Arducopter.
Yes, NMEA. Can you check whether the module outputs 3D velocity? The above PR was added to support it. But with everything working, The performance was just horrible compared any Ublox.
Can you point out which NMEA sentence message give 3D velocity parameter.
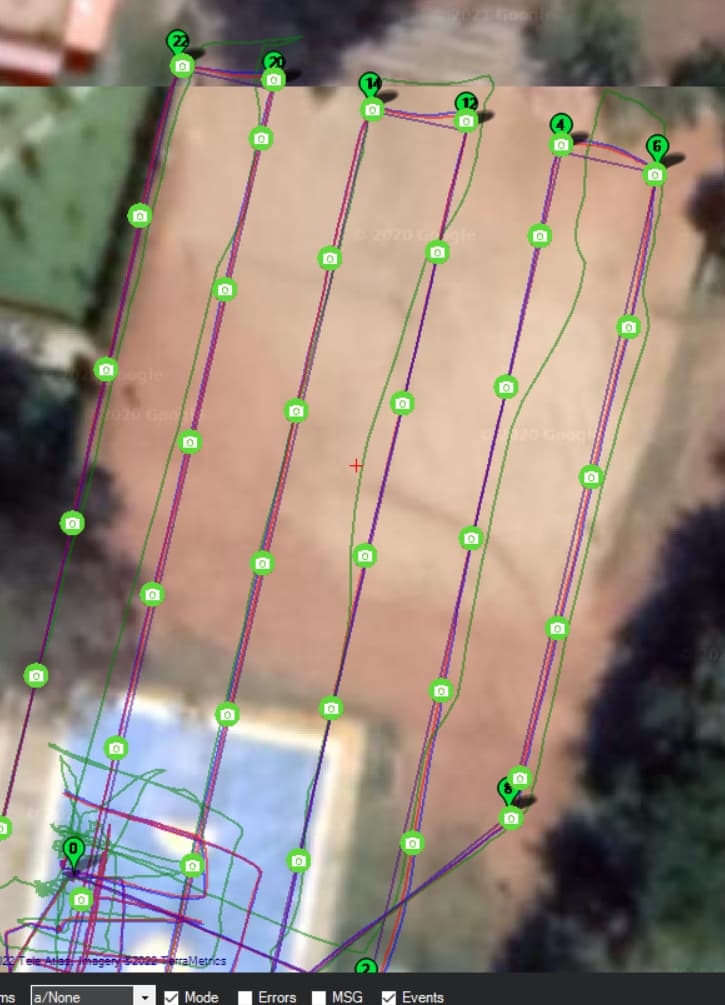
Yes, this and other locosys modules use the same MediaTek chip. Poor performance as soon as the aircraft starts moving.
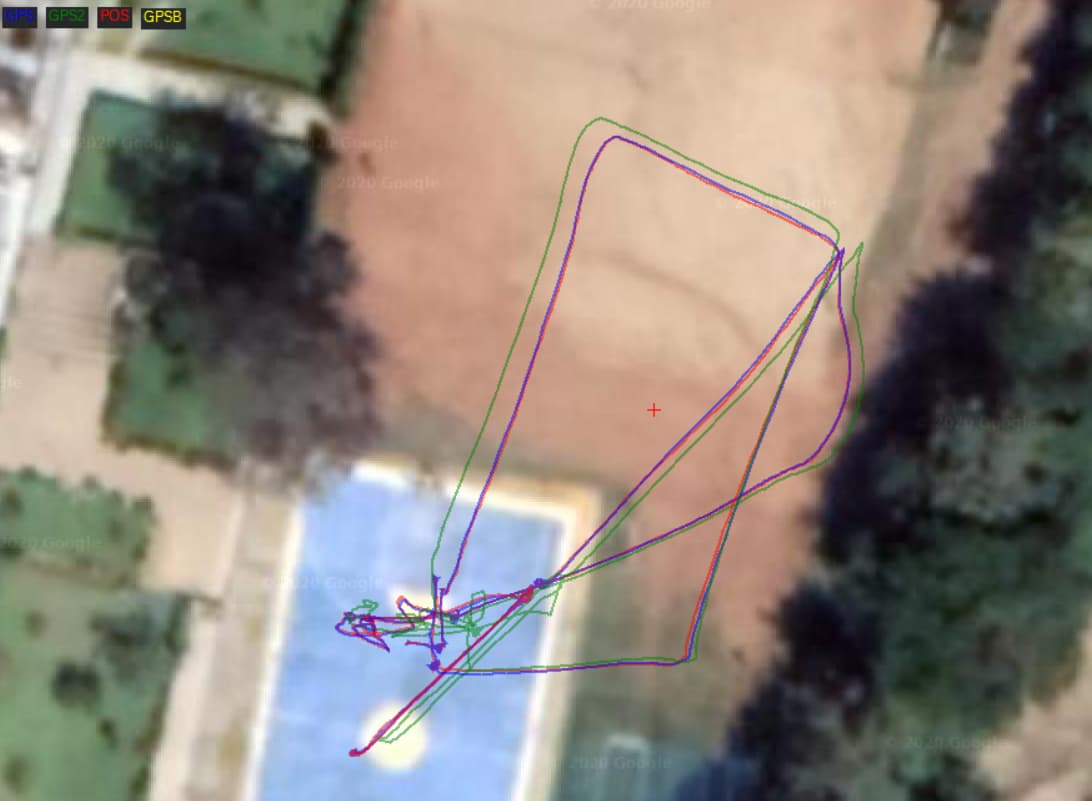
In this gps also i have noticed gps glitch while moving by hand in the ground.
Has your gps position rate was 5Hz without any issue?
Yes, 5Hz. We have other NavIC solution. Planning to release in September.
Specifications if available?
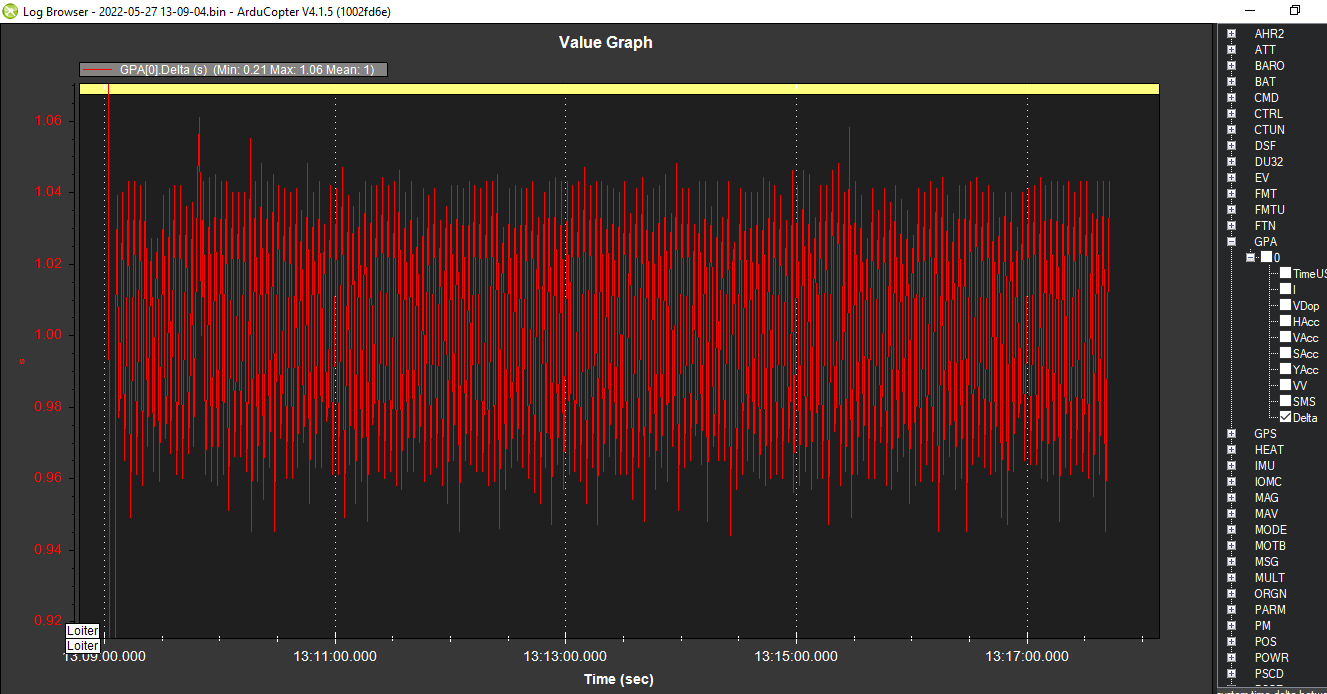
@Mallikarjun_SE my current gps also configured at 5hz only but when come through pixhawk FC it’s showing only 1Hz in the flight log.
I noticed in your Skytraq console that your position rate is at 5hz but your NMEA rate is 1 second(1hz). Its been over a decade since i reviewed the protocol but i think NMEA 183 specified 1 second message loop rate. I would verify this.
How can we verify that and hiw to change it to 5hz for the ardupilot flight controller to accept the protocol?
I understood but in GNSS VIEWER software i can configure NMEA intervel rate is minimum 1sec less than that setting not available in the software itself.
Does arducopter needs all NEMA sentence or only one enough to calculate gps fix.
Because currently Skytraq gps sending 5 NMEA sentence at same time .
Hi
i am getting the same error. Have you solved this yet by any chance?