It looks like the internal error 0x20000000 is defined as a GP I/O error.
gpio_isr = (1U << 25), //0x2000000 33554432
One solution was to fall back to firmware 3.6.12 and it worked. I see that you asked Tridge in the Plane 4.0 thread so that is probably your best move.
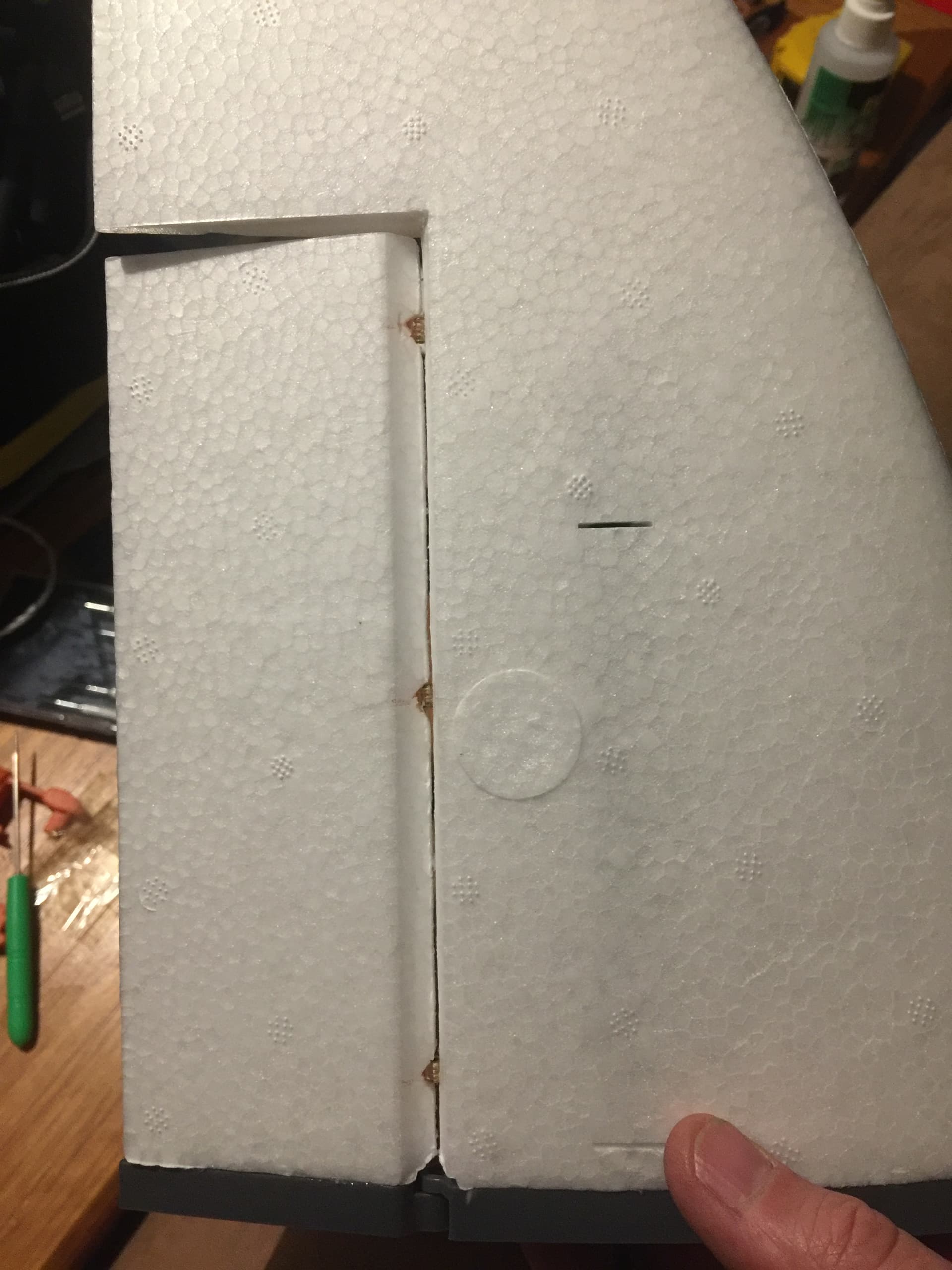
Well it looks like the Fighter and Striver have taken over for 2021. So just a little update on the Nimbus- COVID lockdown has seen her parked up for teh last 3 months, but an end is in sight. Today I decided on my next upgrade hinging the ailerons, they are known for being stiff and only the portion near the servo rod get full through. So with the new hinges I intend to with my 2nd battery turn off Q-Assist and do a full FW auto tune. I’m excited to get back out there.
This was all inspired by my Nimbus Kit form banggood that arrived the other day, securely packed with plenty of bubble wrap and packing tape. The Ailerons and Elevators would not move so need to be cut. From there I guess I had the option of tape or hinges, and hinges won I used these hinges and all appears well so far with 5 across the Ailerons and 3 for the elevators.
I discovered a couple youtube video reviews on the Nimbus Plane and was impressed enough that I have decided to make this my project (since 2x fighters got cancelled on me) I will still go with KDE Motors and ESCS - redundant CAN on a 6s system, cube orange with Here3 because I really want to move forward with these components. As an added bonus. The Kit came partially wired including for tilt servo which will provide 4 wires (including PWM signal wire) for CAN ESC.
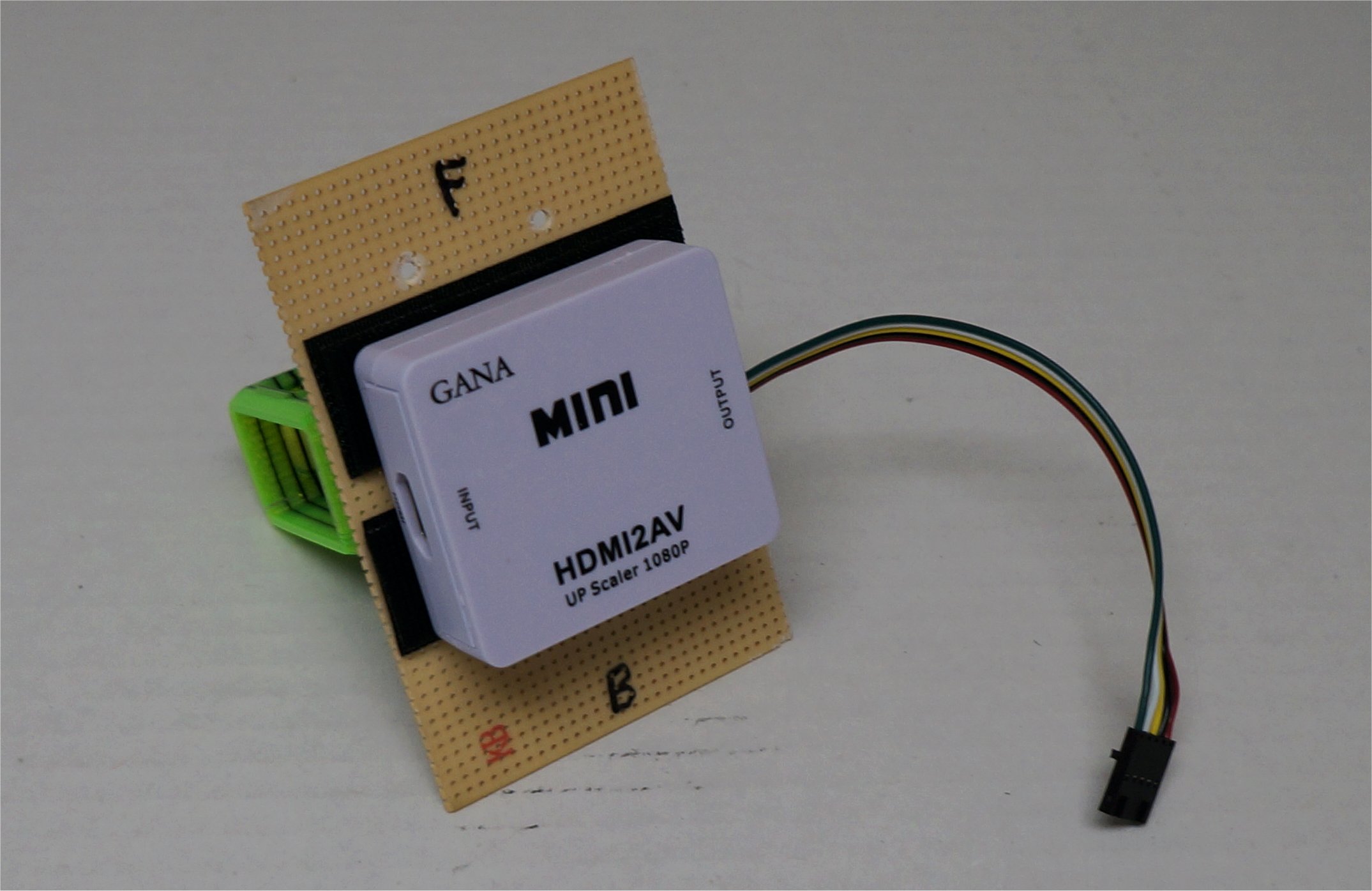
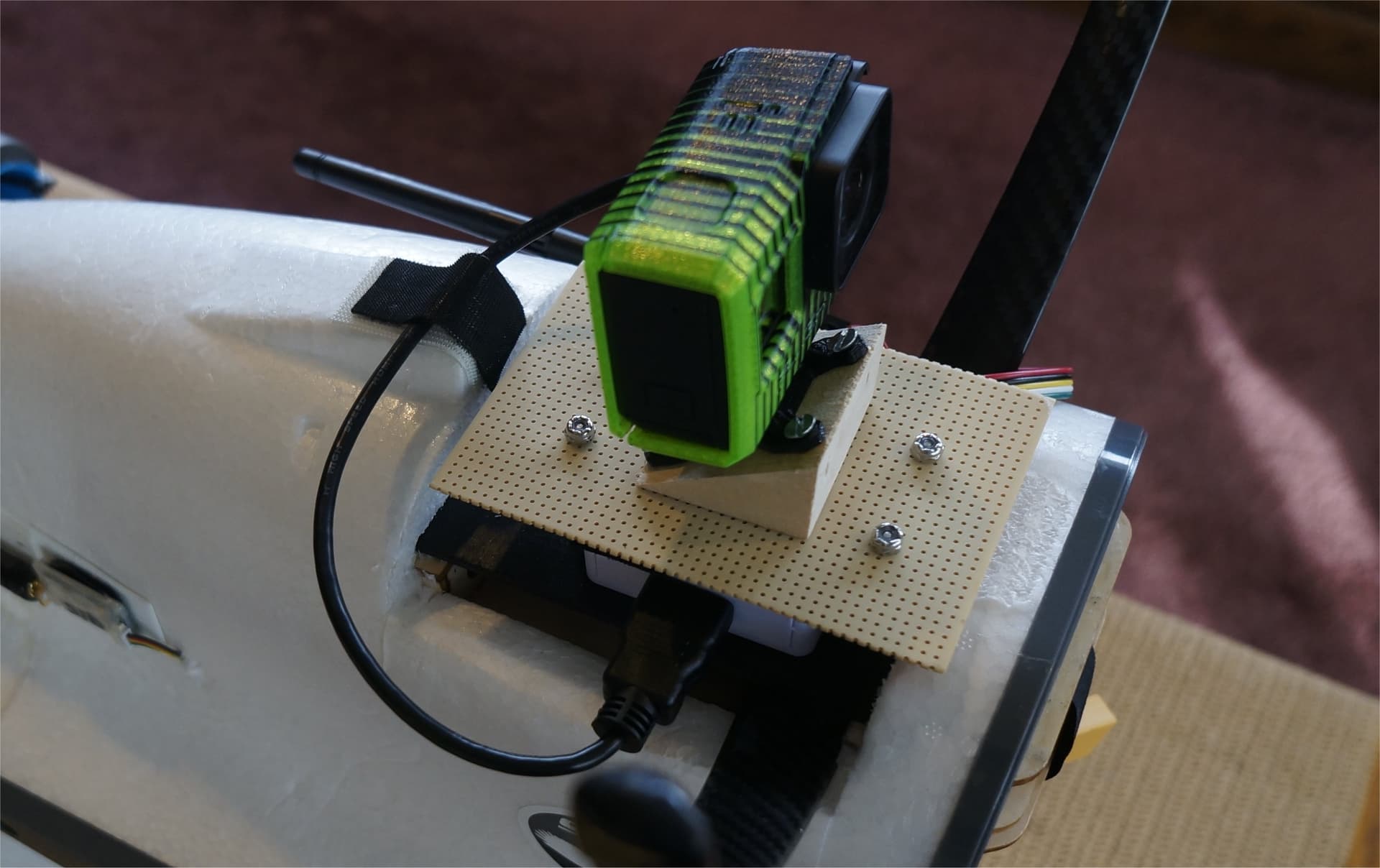
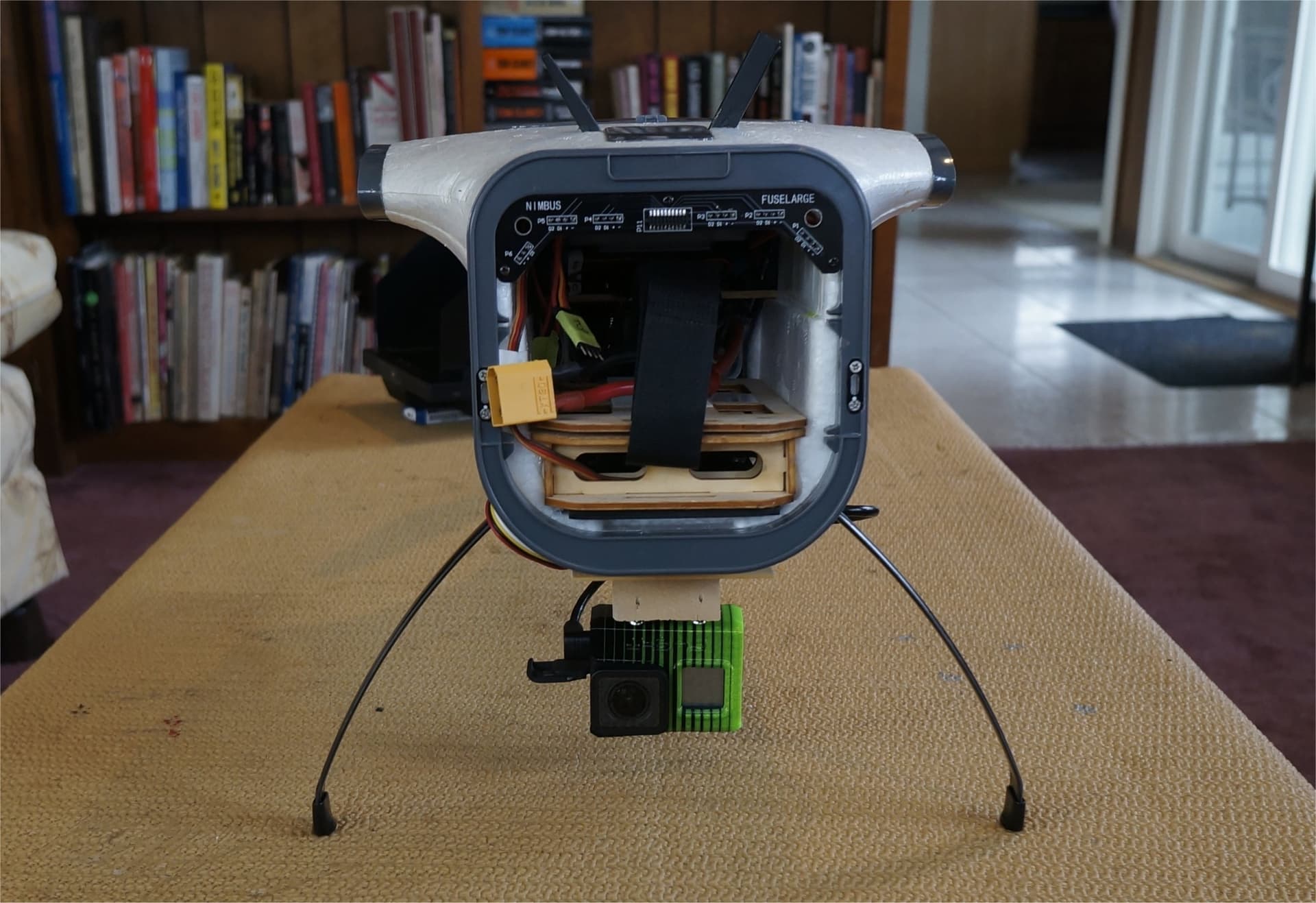
I also flew mine this summer to test out my new fixed mount for the GoPro Hero 7 Black camera. It worked great, including the digital to analog conversion, and I love the built-in HyperSmooth stabilization! It replaces my heavier 3-axis gimbal for the H3.
I ended up not liking the iFlight FPV case shown in the pictures, because it was too difficult to remove the camera, and replaced it with a more traditional snap-in case. Apparently, I never took any photos of it.
Hi Greg,
I’m just wondering I did a test flight the other day with new 4.1.1 it went poorly - seemed to lack power even at 60% which is more then enough to keep the Nimbus in the air. Do you think the aileron modification could have adversely effected lift to that extent? Only1mm-2mm seperation between wing and aileron and alignment it maintained. I have also recalibrated my radio may that was my error - I have spring loaded sticks so 50% of max should be in the middle correct? anyway will try to post a log of the flight - it should make an interesting 3d graph. Microsoft OneDrive - Access files anywhere. Create docs with free Office Online. - Bin file Microsoft OneDrive - Access files anywhere. Create docs with free Office Online. - Tlogs
Hi Greg,
I think I disabled my a/s sensor by blowing to hard I had ARSPD_OPTIONS SET TO 0. a/s and g/s pretty much mirrored each other which shouldn’t have been the case in the wind. I reset it today and it flew great - admittedly mainly in cruise as it was again quite windy. That could have been part of the problem, as well !! I’ll review todays logs later and see how my theory pans out. Thanks as always.
ARSPD_OPTIONS: Airspeed options bitmask
Note: This parameter is for advanced users
Bitmask of options to use with airspeed. Disable and/or re-enable sensor based on the difference between airspeed and ground speed based on ARSPD_WIND_MAX threshold, if set
I’m using older firmware so ARSPD_OPTIONS and ARSPD_WIND_MAX don’t even exist. My Nimbus VTOL also uses an SDP33 sensor that doesn’t need recalibration.
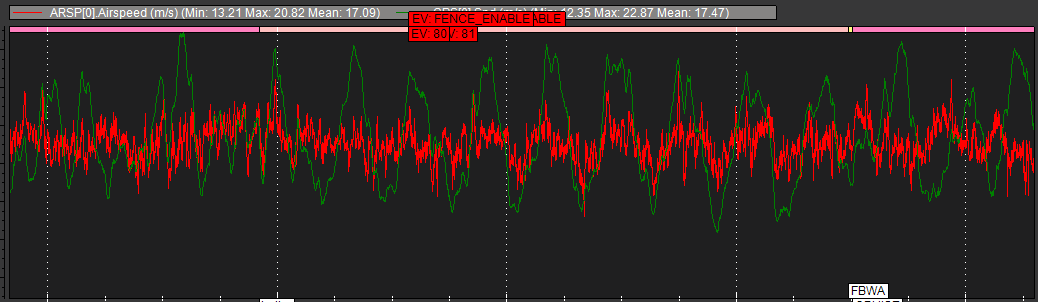
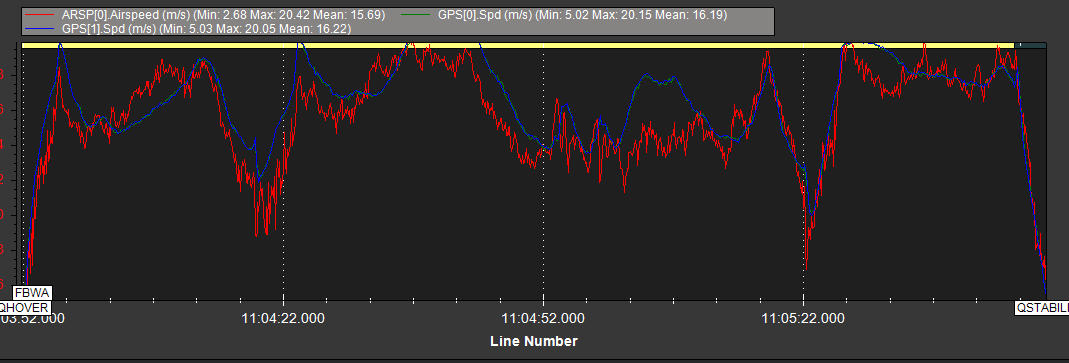
My two airspeed files from Sunday (bottom) and Today (top). significantly greater variation today and more expected in the conditions… similar conditions on Sunday. Sunday was full rc3in for 60%Throttle Today was 50%(1463) rcin for 30% Throttle. for a very similar average airspeed. No ESC calibration but I did recalibrate my RC again.
In short…I think on Sunday I was flying (trying too) FBWA without correctly functioning ARSPD sensor and challenging conditions - in hind sight it would have been good to flip into cruise on Sunday
I try to adjust my automatic airspeed to be close to my FBWA airspeed when the throttle is mid. In my case, I typically fly the Nimbus around 15m/s in FBWA so I set my AS min/max as below. Q_ASSIST_SPEED is set to 9.
Yup, both are no goes. Foxtech is the one that told me they were out of production, and if you go to my fly dream website they state that they are unable to ship oversized items such as airframes due to EMS refusing to take them. The dialogue I had with Foxtech said that it would be out of production for a year but they did not know why. In the past it has taken me up to six months to get an airframe in and right now I can’t find any.
Beat case scenario is that it’s Covid related, worst case they wore out the moulds.
If you are willing to sell it to me I’ll take it. Bangood is saying they are sold out Was going to build 3 more of them for a company in Haiti that is doing earthquake mapping.
I’d also say that I ordered twice now from ali and bang good only to have them tell me it’s not in stock and if I could wait, which I can but now I know they are not making them for awhile so I canceled the “wait for it order”.
I’m planning to build my nimbus VTOL kit. Has anyone tried ArduPlane 4.1.x on nimbus? What version do you guys recommend? @GregCovey I’ll be using Pixhawk Cube Black.
I’m currently using 4.1.2 but will be upgrading to 4.1.3 to take advantage of tuning in Loiter mode. I have not used a full autonomous mission since using 4.1.x

 Was going to build 3 more of them for a company in Haiti that is doing earthquake mapping.
Was going to build 3 more of them for a company in Haiti that is doing earthquake mapping.