For the initial flights, you don’t want to enable the AS sensor until after it is calibrated and checked out in the logs against the GPS Speed readings.
ARSPD_USE should be 0 not 1 for initial flights. Also, set ARSPD_AUTOCAL to 1 for calibration during test flights. Reverse both values when the log looks good.
For SERVO7_FUNCTION, you have it set to 39 which will never be used on this model so hopefully you are not using that pin on the Pixhawk. Normally, it is set to 35 and you can use either output 7 or output 8 on the Pixhawk for the rear motor ESC.
Remember to thoroughly test the copter functions first before attempting to transition to forward flight.
Greg,
Im not using servo 7 so will disable it, as for the AS will do as you described.
But for the reverse yaw movements how can i fix it, as i mentioned before when applying rudder in qstabilzie mode, motors are inverted.
Thanks
I thought my initial post at # 1194 described how to set up the channels. To test the transmitter control of the rudder direction, use FBWA or Manual mode when disarmed.
And good luck on your maiden flight! Make sure it hovers well first before transitioning to forward flight. If it doesn’t fly properly, your emergency bailout mode is to go back to QHOVER or QLOITER mode.
Just an FYI since I’m not familiar with the FoxTechFPV setup. If they use a Pixhawk 1 (aka v2.4.8), make sure that you have a 5.7v zener diode across the 5v and Gnd Output or Aux pin.
Hi Greg - I don’t believe it is providing secondary power to the Cube. If its not then the zener is detrimental so unfortunately you can’t instal one just in case. I was just happy to know what it is for
Hi sir,
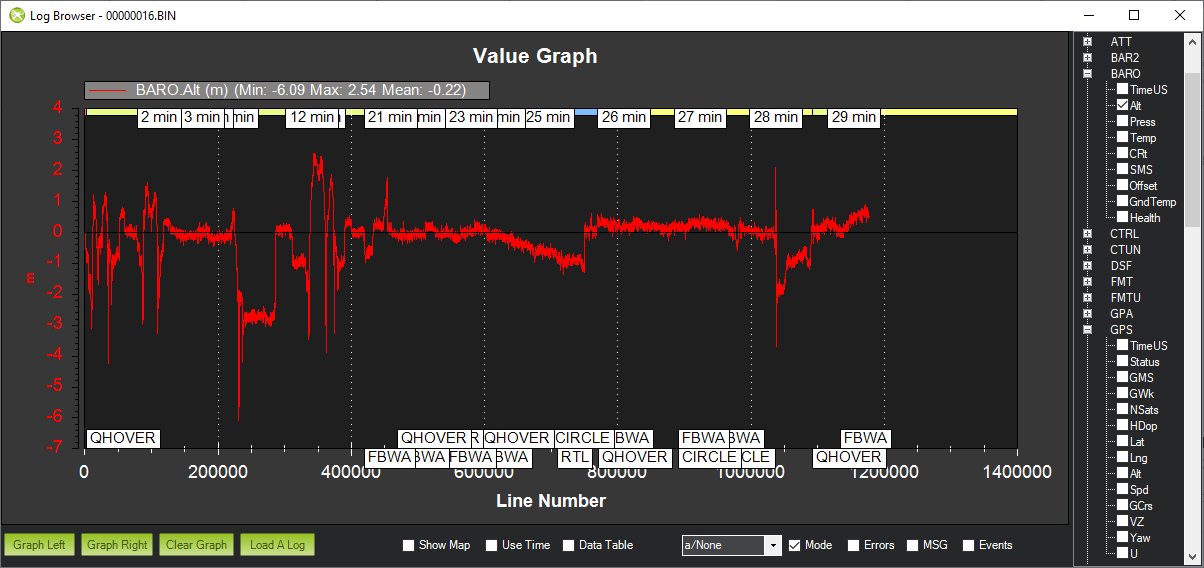
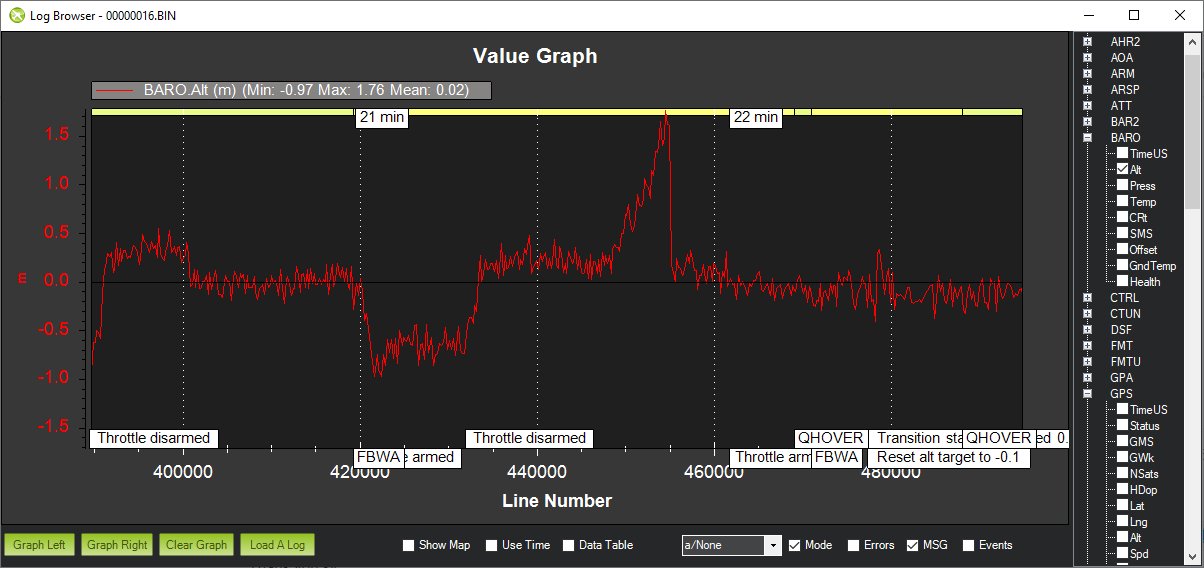
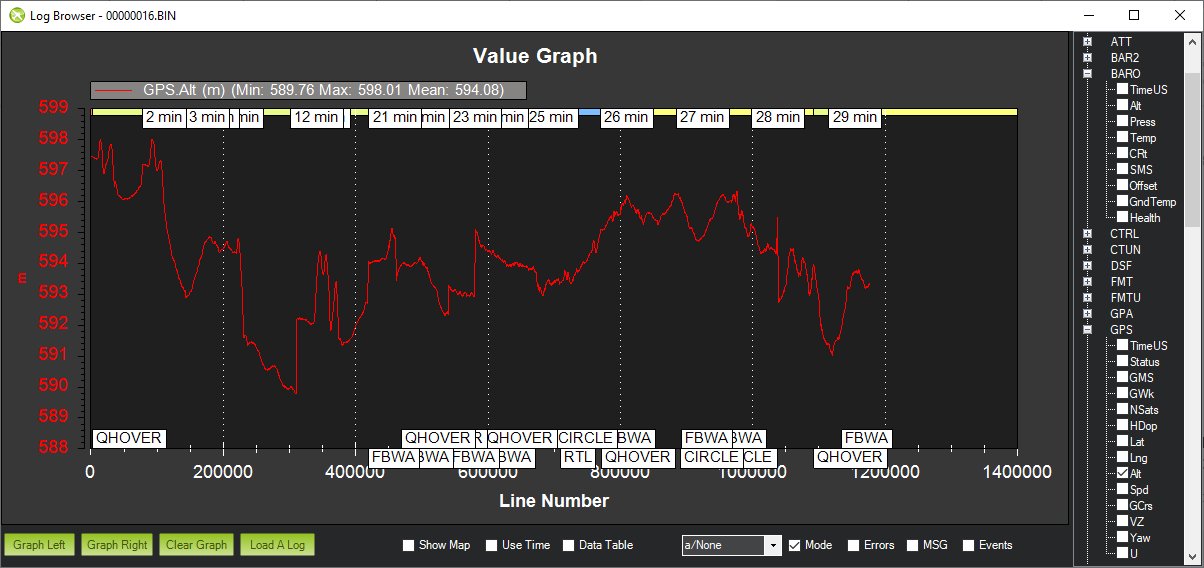
I have a strange behavior of my quad plane, It is losing its altitude after 2 meters. The same configuration is worked in the quad plane. now we did quadpalne with front 2 motor tilt. In this, it losing altitude. When we are observing in logs, VTOL is looks like is under power. but the same hardware is successful in a quad plane without Tiltrotor.
i am attaching the log below please give me any suggestions.
I looked at your log and cannot make sense of it. Even the UAV Log Viewer had issues trying to follow the telemetry log. The BARO and GPS graphs are not proper. Perhaps someone else can make sense of this log.
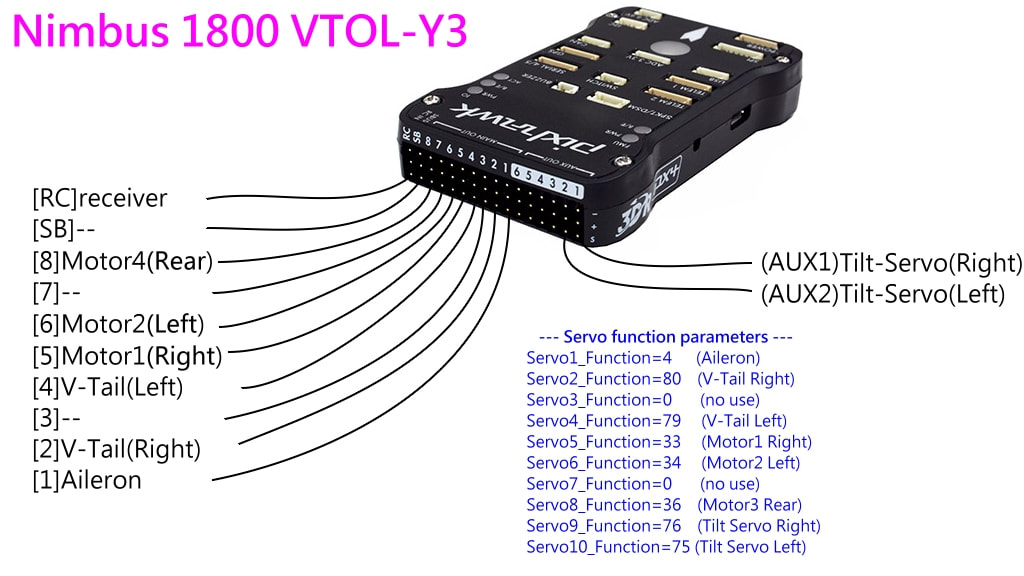
Can you tell me which motors and tilt servos will be connected to which pin output ? What parameters do I need to change for our own plane without using ready-made parameters? I think a documentation should be made for this. what do you think ?
The original DIY version from CUAV did have the pinouts defined for a Pixhawk 1 and also had a Web page manual for assembly. Links to this documentation have been posted many times in this thread. The image below was the original wiring document for the Pixhawk.
Since then, FoxTechFPV has been making them as RTF models and then the designer, MFD, decided to offer an RTF version as well. So, over the years, there has been much evolution in this design with multiple sources for parts.
Hi All,
I have removed the PG20 battery swapping device it operated from Main 7 on Servo 7 (75) tilt motor left. Now it has been removed I set Main 7 on Servo 7 to 0 - disabled. Everytime I re connect MP parameters revert to servo 7 ( 39) Motor 7 - Is this normal / is this safe. Is there another parameter I should use / just put back to (75) even though it is removed? Frame type etc are still the same 7,1 so there should be no input / output for a motor 7
I’m not sure if you are using FoxtectFPV firmware for your Nimbus or standard release APM Plane firmware. It is possible that the firmware is changing the setting of SERVO7_FUNCTION. The assumption here is that you did a “write parameter” after changing it to 0.
In any case, the setting of the unused SERVO7_FUNCTION will not affect your desired operation as the output is now unused.
Understanding that the CUAV is a DIY build - The Foxtech design for Tilt rotor is much ‘cleaner’. And you could definately find better value for the conversion kits…That said the DIY instructions are handy. Nice find.
Hi Greg and fellow Nimbus users; I have an internal error related directly to my CAM FEEDBACK PIN… But cannot locate the error in my Parameters - If I disable CAM FEEDBACK PIN the internal error also disappears. Folder containing logs and Params etc can be found at the included link. Any help appreciated