Hi Steven,
Nice to hear a good feedback for Foxtech. As they price are quite low compare to usual pro drone players we could expect lower quality or service.
What is your feeling on your Nimbus build quality ?
Hi Pascal P,
The build was like I expected – I’ve read the thread all the way through – so its ok, solid, thinking of dry lube for the clips they are really stiff. Ihave the PG-20 version and the battery compartment is REALLY tight. I wish it had a On/Off switch I hate connecting things hot, any advice or tips here appreciated. Set-up it certainly not plug and play especially if you have to update…I’m new to Ardu as well so that make things interesting. I’m having trouble connecting my controller No heartbeat via blue tooth or USB to mission planner so haven’t made it to calibration yet… As for service Doris via online chat is awesome / patient.

1 Like
Parameters file from FOXTECH.
https://drive.google.com/file/d/17lgQR3PaiJAXigE_O4zfaOJNpSdJI62l/view?usp=drivesdk
1 Like
hi guys, I want to share my experience with FOXTECH.
I bought from them Nimbus VTOL V2 Grey kit with Herelink Radio control. Because I didn’t have the budget to buy it complete, I built it piece by piece.
I ask Foxtech to send me the firmware and parameters to install them in Pixhawk Cube 2.1 and at that time I was ready to make my first flight. So they send me firmware: Arduplane4.0.1 and the parameters. (@Steven_Young the parameters I send you)
I install them and I started to make my first test flights.
The only problem I had is that I was getting “Throttle Failsafe” after 4-5 minutes of flight and distances not more than 100 meters. During flights I was having clear line of sight, without any obstacles between me and Nimbus. I want to say that Herelink can achieve Radio/Video control over 20km, so it was very strange to get “throttle failsafe” in just 100 meters!
I contact Foxtech for that issue and send them multiple LOG files from my test flights. They told me that the problem was the firmwire and the antenna positioning. They send me new firmwire Arduplane4.1.0dev + new parameters compatible with their new diamond battery 22000mah.
I install new firmwire and parameters as Foxtech suggested. Also I change the antennas far away from the carbon landing gear.
Finally I went for another test flight…
I realize that Nimbus was not as stable as before…it was responding to my joystick movements but when on LOITER the motors where somehow not working as expected and from time to time was loosing about 1 meter of the elevation and going back.
After 7-8 minutes of VTOL flight suddenly motors stopped working and Nimbus crash to the ground. I was very upset because with the previous firmwire was very stable… The main body and one wing was destroyed. The battery was hit to the ground and change slightly its shape…I don’t know if I can use it again…
I send the LOG file to Foxtech and the answer was the following:
“It is the first time our tech meet, so we send the log to the pixhawk manufacture.
Feedback from Pixhawk: The safety switch was locked during the flight. The cause of the safety switch being locked may be that the IO MCU restarted. Pls try to check if there is any part of the power supply that has been unsoldered, or whether the fuselage was very hot at the time, causing the power supply to be soldered. Break away. Whether there was water in the aircraft during the flight at that time, if none exists, it may be a software bug”
I double check every part and cable from battery and power supply to Pixhawk Cube and the motors and they are soldered very well.
I believe it is a software bug because the version they send me, is not yet officially released from Ardupilot as stable. (@GregCovey I need your advice with the log file)
Damages from crash: nimbus body, titling system, nimbus nose, carbon tail tube and the battery 22000mah.
Any advice guys?
Hi Petrou,
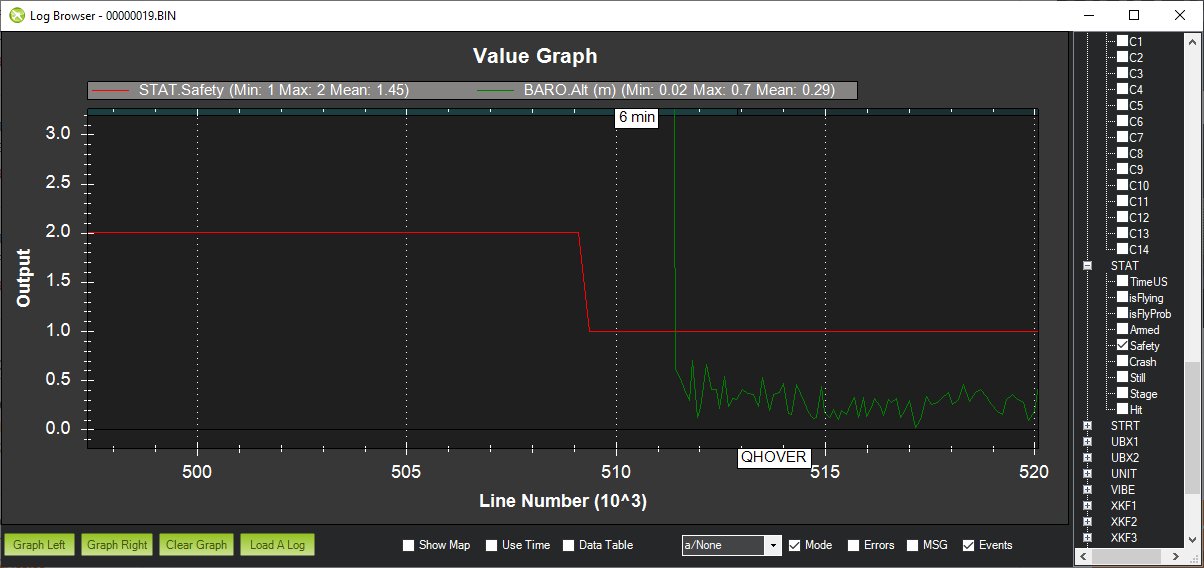
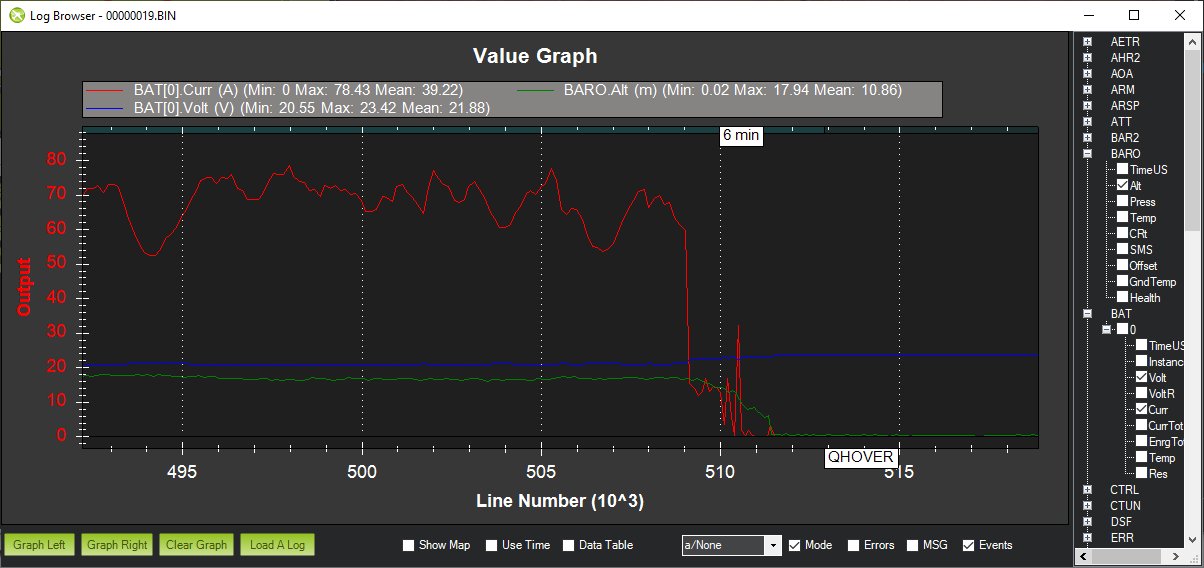
Sorry to hear about your crash…especially during a hover. I looked at the log and it does appear that the safety switch may have triggered the event, although I am not sure how to detect a Pixhawk reset in flight. The time of 509 is when your motors cut out. There were no error messages, which may suggest a flight controller reset. I would suggest searching for “cube reset” on the main ArduPilot forum page as there are many threads about the cube resetting.
The statement below may be the issue as your logging kept running during the incident. I doubt that you had any issue with the power supply.
The cause of the safety switch being locked may be that the IO MCU restarted.
1 Like
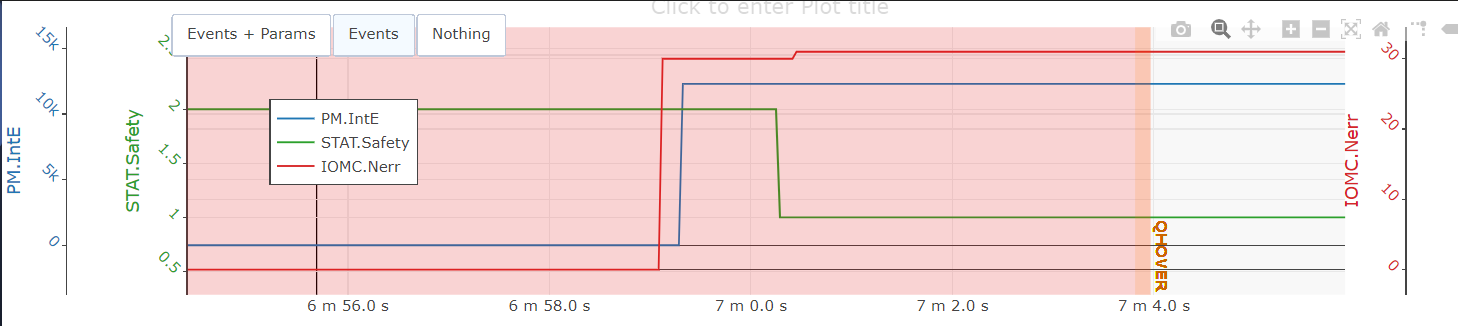
The log shows IOMCU failure and reset occurring before STAT.Safety changes from armed to disarmed (2 to 1). I don’t see any indication that the FMU has failed, so it looks like either the IOMCU hung or the serial connection between FMU and IOMCU failed.
1 Like
Thanks, Mark! Is there any way a software bug could cause this or is it definitely a hardware issue?
I don’t think we can rule out a firmware bug unless the IOMCU is still failing after the crash.
And I’m not familiar with the CubeBlack hardware, so I can’t speculate on the reliability of the connection between FMU and IOMCU.
Hi! i am new to the forum, i want to ask for help, i started building the nimbius tricopter. Would you care where the tail motor cables were routed?
Hi Jándli,
Welcome to the VTOL forum! You can simply drill a hole in the carbon tube to run the tail motor or ESC wires through to the main body. Many of us used the photos from the original conversion by kris as a reference.
Cheers!
I also looked at that page but escaped my attention.
thanks Greg!
I’m learning slowly and am just about ready to get in the air. I think my expectations for Ready to Fly were a little high for the Nimbus. I have a question for those with PG20 fitted. Can you actually see both battery voltages? I dont think the PG 20 has anything /relay? to show the unused 2nd battery. Also my camera is registering a shot in mission planner however the shutter is not activating. Any help appreciated.
Steve
HI All,
So a little update, To answer my own question from above - PG 20 registers battery based on servo output and changes to hi C battery when above say 45deg. This change (variation in battery’s) can be viewed in the telemetry. I have QCG connected via bluetooth to Samsung Galaxy. Though I do get a compass error related to the transfer from MP Parameters to QGC.
My CofG is 7cm back from leading edge in RTF plane mode - The Nimbus V2 manual list CofG at 13-15cm and I know on here it’s generally around the 10cm mark. I know I can add some weigth at the back to shift the CofG rearward, but TOW isalready sitting at 5.22kg with 16Ah and 2.2Ah batteries on board I really don’t feel like adding to much. What should I be aiming for with my CogG?
CG: 10cm from LE as per the User Manual
Hi Greg,
I have been able to achieve 10cm. I have attached the foxtech link I was referring to. https://www.foxtechfpv.com/product/fixedwing/Nimbus/100cg.jpg
{kind=link}
Thanks heaps for the clarification.
Steve
Interesting. I haven’t seen that before. In fact, the main reviewer I follow, Arxangel, was recommending 9cm. Mine flies fine at 10cm so it is a safer place to start than 13-15cm.
Cheers!
Thanks just re-read an earlier post will adjust elevator min and max for 30deg, I have already played around as they would touch when up. Was able to add 3oz of weights to the tail to adjust CoG.
Is anybody having good sucess with MAP-02? I had it working and now will only trigger via the image edge software. I have reset parameters to where I saved them after I got camera to work. If I push trigger camera in MP, MP records a photo taken but the the shutter does not activate. However if I’m connected to Sony Image Edge- I can activate the trigger by shorting Green and Yellow (on mine) per Foxtech instructions. So I know it all works. If I close image edge software and try to activate camera by shorting it will not trigger - thoughts?
It sounds like your Camera Shutter Configuration is incorrect on the Pixhawk or you are plugged into the wrong port. Make sure that you are set correctly for servo or relay and have the correct port selected.
So tonight I changed back to AUX5 and Relay 54. I was then able to connect Nimbus via usb to my computer and camera via usb to my computer and start MP and Camera App. Camera app would trigger camera and then MP would trigger camera - after I have used MP trigger camera app would not trigger the camera. So I then connect Remote control to Nimbus and remove usbs. No trigger of camera shutter. So I connect camera again via usb and Camera app. I can again trigger camera in MP like before. So camera requires usb and camera app to work but appears to trigger via AUX5 as long as usb is connected and camera app is on
Take care
Steve
https://drive.google.com/file/d/1As2wKo5_quz9fDoyRXUXHObgmDDZJwNM/view?usp=sharing - Bin File
https://drive.google.com/file/d/1sLwyr5ECGexQnzWeA0lHaGeIZzM3REEA/view?usp=sharing - Video
I know this is only short but I have attached my first genuine powered up and attempt to hover, never actually got of the ground, but I am hoping someone might have a quick look at the .bin in case anything is bleeding obvious out of wack.
Update on the camera setup… I had Mike from Foxtech on skype meeting the other day and we were able to establish a camera error, have since purchased a micro HDMI cable (so the internal settings can be adjusted to correct the issue) and look forward to another Skype meeting with him to correct the problem. I cannot complain about the customer service.
Thanks in advance
Steve
![]()